
都市の電力網線路のケーブル化と地中化は、配電網建設における不可逆の傾向となっています。高圧スイッチギアは配電システムの核心設備であり、維持管理担当者が日常的に操作とメンテナンスを行う主な対象となっています。設備の更新過程において、新設備の全面的な交換と調整には長い期間が必要であり、古い手動式高圧スイッチギアが依然として稼働しています。
長期間の運転により、このようなスイッチギアは開閉操作中にアーク発生のリスクがあります。実際のメンテナンス現場では、電動操作が失敗した場合、作業員が手動で閉鎖する必要があり、これによりアークによる安全上の脅威に直接さらされます。そのため、設備更新の移行期間中の補助的安全措置として、手動操作を代替するリモート閉鎖装置の開発が急務です。
この問題に焦点を当て、プロジェクト参加者として、本論文では古い手動式回路ブレーカーの動作特性を分析し、手動操作時の安全リスクを避けるためのリモート閉鎖操作装置を設計します。
手動式回路ブレーカーの従来の閉鎖方法
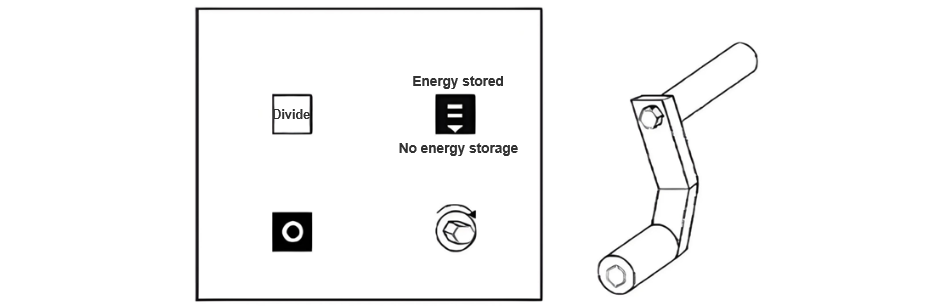
手動式回路ブレーカーの操作パネルおよびクランク構造(図1参照)では、手動閉鎖用の回転棒がパネルの左側に位置しており、断面が正六角形です。操作ハンドルはZ字型で、下端が正六角形のソケットを通じて回転棒にプラグイン接続されています。操作時には、ハンドルを回転棒に挿入し、上端を時計回りに約24回転することで、回路ブレーカーの閉鎖動作が完了します。
トルク計算の基準と設計基準
連動操作ハンドルの構造特性に基づき、回路ブレーカーの手動閉鎖に必要なトルク要件は、力点の長さと引張力パラメータを決定することで導出できます。機械式の公式に基づいて

操作特性の分析によると、手動操作の回路ブレーカーの回転抵抗は15回目の回転サイクルでピークに達します。この時点での最小トルクデータは、全体の閉鎖プロセスをカバーすることができます。リモート閉鎖装置のトルク設計は、異なる回路ブレーカーモデル間のトルク変動に対応するために、この臨界値を超える安全マージンを持つ必要があります。詳細なテストデータは後述のセクションで提示されます。
リモート閉鎖装置の基本構造
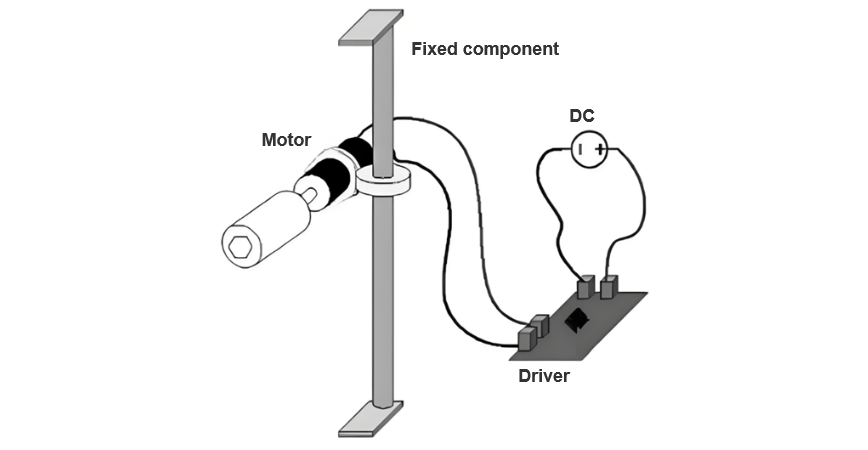
図2に示すように、装置は固定ロッド、可動部品、電動装置、および閉鎖ジョイントで構成されています。固定ロッドは伸縮可能に設計されており、両側に支持板が溶接されています。設置時には、まずロッドを短縮してキャビネットに垂直に配置し、次に延長して支持板がキャビネットを支えて水平に固定します。可動部品は垂直方向に調整され、電動装置の閉鎖ジョイントが手押車スイッチの回転頭部と一致するようにします。設定後、オペレーターは安全な場所に退避し、リモート送信機を介して時計回りの信号を送ることで閉鎖操作を完了します。
リモート制御と操作の実現
モーター選択とパラメータ
コアモーターモジュールの選択において、永久磁石DCブラシレスモーターとブラシ付きモーターを比較しました。ブラシレスモーターは寿命と騒音レベル(≤55dB)において大きな利点がありますが、制御回路が複雑でコストが高い(ブラシ付きタイプより40%高い)という特徴があります。装置のモーター制御に対する要求が厳しいわけではないため、シンプルな制御と低コストのXD-3420永久磁石DCブラシ付きモーターが選ばれました。主要パラメータ:
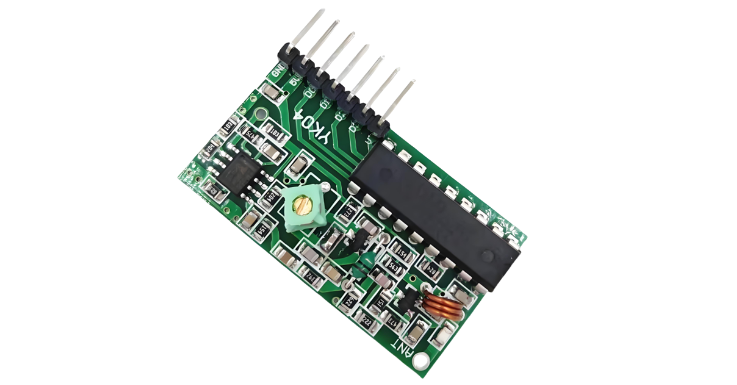
維持管理人員が安全な距離から操作できるように、装置は無線電源管理のためにQichip QA-R-010ワイヤレスリモートコントロールスイッチを使用しています。モジュールは送信機と受信機で構成されています:受信機は3.6V〜24VのDC入力をサポートし、赤/黒線が正/負極入力に、青/灰色線が対応する出力(出力電圧は入力に一致)に使用されます。二つのボタンの送信機は瞬時、ロック、インターロックの三つの出力モードを提供します。プロジェクトでは瞬時モードを使用しており、スイッチモジュールはボタンが押されている間のみ導通し、リリース時に即座に切断されるため、閉鎖操作中の一時制御の要件を満たします。
現場でのリモート制御実験

私たちはテンションテスターを使用して、廃止された手動式手押車スイッチの手動閉鎖に必要な引き込み力を測定しました。表1に示すように、手動閉鎖が約15回目になると、手動閉鎖に必要な最小引き込み力が最大値に達します。この引き込み力を使用して、手動閉鎖プロセス全体に必要な最小トルクは1.75 N・mであると計算しました。

私たちは伝統的な手動閉鎖方法とリモート閉鎖装置の操作時間を比較しました。表2に示すように、リモート閉鎖装置を使用すると、リスクを回避しながら、純粋な手動操作よりもわずかに効率が向上します。時間コストを増やさずに、オペレーターの安全リスクを大幅に削減することができます。
現在の配電網において、メンテナンス人員が古い手動式回路ブレーカーを近くで操作する際に生じる安全リスクに対処するために、私たちは補助装置を提案し開発しました。これはメンテナンス人員がスイッチギアから距離を保ちながら、リモートで回路ブレーカーの閉鎖を制御できるようにします。私たちはプロトタイプの基本的なソフトウェアとハードウェアコンポーネント、およびその使用法について詳細に説明しました。トルクテストの結果、このリモート閉鎖補助装置は手動式回路ブレーカーの閉鎖トルク要件を満たしています。伝統的な操作方法と比較して、操作時間はほぼ同じですが、メンテナンス人員がそのような回路ブレーカーを近くで操作するリスクを回避し、時間コストを増加させずに、装置は優れたエンジニアリング応用価値を持っています。










