
شهریانه شبکه برق و کابلگذاری خطوط زیرزمینی به عنوان روند غیرقابل برگشتی در ساخت شبکه توزیع شده است. دستگاههای قطع کننده فشار قوی، به عنوان تجهیزات اصلی سیستم توزیع، مورد توجه اصلی نگهداری و عملیات روزمره توسط کارکنان نگهداری قرار گرفتهاند. در طول فرآیند تکامل تجهیزات، جایگزینی کامل و راهاندازی تجهیزات جدید چرخه بلندی دارد و نوعی از دستگاههای قدیمی قطع کننده فشار قوی با دستچرخ هنوز در خدمت است.
به دلیل عملکرد طولانی مدت، چنین دستگاههایی در حین عملیات باز و بسته شدن مستعد خطر آتشسوزی هستند. در سناریوهای نگهداری واقعی، وقتی عملیات الکتریکی ناموفق است، نیاز به بسته شدن دستی توسط کارکنان وجود دارد که آنها را مستقیماً در معرض تهدیدات ایمنی از آتشسوزی قرار میدهد. بنابراین، توسعه یک دستگاه بسته شدن دوردست برای جایگزینی عملیات دستی به عنوان یک تدابیر ایمنی کمکی در طول انتقال به تجهیزات جدید ضروری است.
با تمرکز بر این مسئله، به عنوان یک شرکتکننده در پروژه، این مقاله با تحلیل ویژگیهای عملیاتی قطع کنندههای قدیمی دستچرخ، یک دستگاه عملیات بسته شدن دوردست طراحی میکند تا خطرات ایمنی در طول عملیات دستی را اجتناب کند.
روش بسته شدن سنتی قطع کنندههای دستچرخ
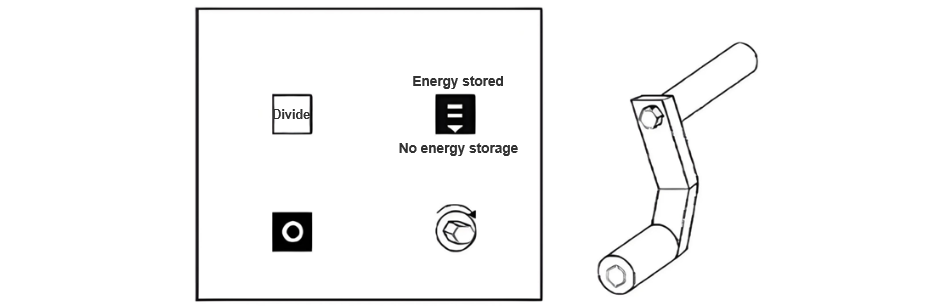
در صفحه کنترل و ساختار دستچرخ قطع کنندههای دستچرخ (مانند شکل ۱)، میله چرخشی دستی روی سمت چپ صفحه با سطح مقطع شش ضلعی منظم قرار دارد. دسته عملیات Z-شکل است و از طریق یک آغوش شش ضلعی منظم در انتهای پایین به میله چرخشی متصل میشود. در طول عملیات، پس از قرار دادن دسته در میله چرخشی، چرخاندن انتهای بالایی در جهت عقربههای ساعت حدود ۲۴ دور عملیات بسته شدن قطع کننده را کامل میکند.
پایه محاسبه گشتاور و معیارهای طراحی
بر اساس ویژگیهای ساختاری دسته عملیات، نیاز گشتاور برای بسته شدن دستی قطع کننده میتواند با تعیین طول بازوی نیرو و پارامترهای نیروی کششی مشتق شود. بر اساس فرمول مکانیکی

از طریق تحلیل ویژگیهای عملیاتی، مقاومت چرخشی قطع کننده دستی در دور چرخش ۱۵ام به حداکثر میرسد. دادههای گشتاور کمینه در این نقطه میتواند کل فرآیند بسته شدن را پوشش دهد. طراحی گشتاور دستگاه بسته شدن دوردست باید با یک حاشیه ایمنی از این مقدار بحرانی فراتر رود تا تغییرات گشتاور در مدلهای مختلف قطع کننده را پوشش دهد. دادههای آزمایشی دقیق در بخشهای بعدی ارائه خواهد شد.
ساختار اساسی دستگاه بسته شدن دوردست
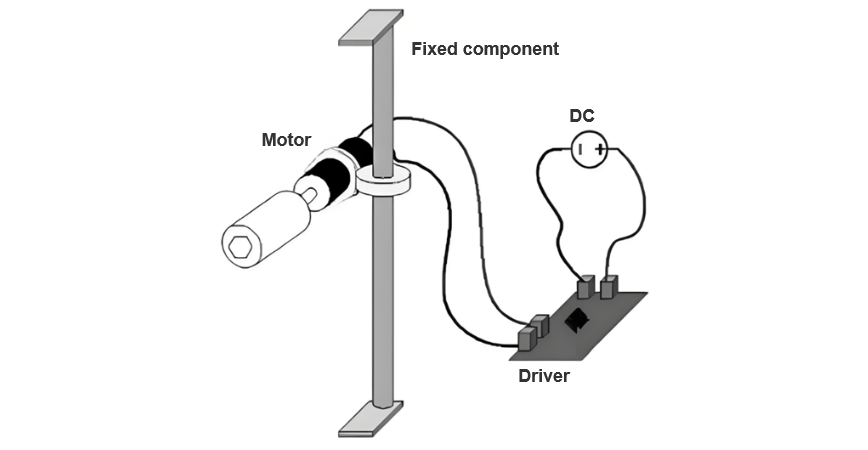
همانطور که در شکل ۲ نشان داده شده است، دستگاه شامل میله ثابت، اجزای متحرک، دستگاه الکتریکی و اتصال بسته شدن است. میله ثابت طراحی شده است تا قابل تنظیم باشد و صفحات پشتیبان در دو طرف آن لحیم شدهاند. در زمان نصب، ابتدا میله کوتاه شده و عموداً درون کابین قرار میگیرد، سپس بسط یافته و صفحات پشتیبان برای تثبیت افقی در مقابل کابین قرار میگیرند. اجزای متحرک در جهت عمودی تنظیم میشوند تا اتصال بسته شدن دستگاه الکتریکی با سر چرخش دستچرخ متناسب شود. پس از تنظیم، اپراتورها میتوانند به منطقه ایمن عقبنشینی کرده و از طریق فرستنده دوردست سیگنالی در جهت عقربههای ساعت ارسال کنند تا عملیات بسته شدن کامل شود.
اجرای کنترل و عملیات دوردست
انتخاب و پارامترهای موتور
در انتخاب ماژول موتور اصلی، موتورهای DC بدونブラシとブラシ付きの永磁直流电机进行了比较。无刷电机在使用寿命和噪音水平(≤55dB)方面具有显著优势,但其控制电路复杂且成本较高(比有刷类型高出40%)。鉴于该设备对电机控制的要求不高,选择了控制简单且成本较低的XD-3420永磁直流有刷电机。主要参数:
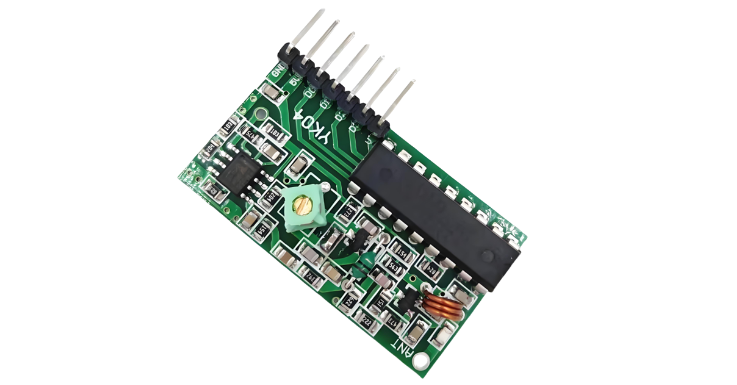
为了使维护人员能够从安全距离操作,该设备采用了Qichip QA-R-010无线遥控开关进行无线电源管理。模块由发射器和接收器组成:接收器支持3.6V至24V的直流输入,红色/黑色线为正/负输入,蓝色/灰色线为相应的输出(输出电压与输入匹配)。双按钮发射器提供三种输出模式:瞬时、锁存和互锁。项目使用瞬时模式,在按下按钮时开关模块才导通,释放后立即断开,以满足闭合操作期间瞬态控制的要求。
现场遥控实验

我们使用拉力测试仪测量了退役手摇手车开关手动闭合所需的拉力。如表1所示,当手摇闭合达到大约第15圈时,手动闭合所需的最大拉力达到最大值。利用此拉力,我们计算出整个手摇闭合过程所需的最小扭矩为1.75 N·m。

我们比较了传统手动闭合方法和远程闭合装置的操作时间。表2显示,使用远程闭合装置不仅避免了风险,而且与纯手动操作相比稍微提高了操作效率。在不增加时间成本的情况下,显著降低了操作人员的安全风险。
为解决当前配电网中维护人员需要近距离操作老旧手摇断路器的安全风险问题,我们提出并开发了一种辅助装置。它允许维护人员远离开关柜并远程控制断路器闭合。我们详细介绍了原型的基本软硬件组件及其使用方法。扭矩测试表明,这种远程闭合辅助装置满足手摇断路器的闭合扭矩要求。与传统操作方法相比,操作时间相似。它避免了维护人员近距离操作此类断路器的风险,且不会增加时间成本,该装置具有良好的工程应用价值。
--- 看来在翻译过程中出现了语言混杂的情况。以下是修正后的完整达里语翻译:شهریانه شبکه برق و کابلگذاری خطوط زیرزمینی به عنوان روند غیرقابل برگشتی در ساخت شبکه توزیع شده است. دستگاههای قطع کننده فشار قوی، به عنوان تجهیزات اصلی سیستم توزیع، مورد توجه اصلی نگهداری و عملیات روزمره توسط کارکنان نگهداری قرار گرفتهاند. در طول فرآیند تکامل تجهیزات، جایگزینی کامل و راهاندازی تجهیزات جدید چرخه بلندی دارد و نوعی از دستگاههای قدیمی قطع کننده فشار قوی با دستچرخ هنوز در خدمت است.
به دلیل عملکرد طولانی مدت، چنین دستگاههایی در حین عملیات باز و بسته شدن مستعد خطر آتشسوزی هستند. در سناریوهای نگهداری واقعی، وقتی عملیات الکتریکی ناموفق است، نیاز به بسته شدن دستی توسط کارکنان وجود دارد که آنها را مستقیماً در معرض تهدیدات ایمنی از آتشسوزی قرار میدهد. بنابراین، توسعه یک دستگاه بسته شدن دوردست برای جایگزینی عملیات دستی به عنوان یک تدابیر ایمنی کمکی در طول انتقال به تجهیزات جدید ضروری است.
با تمرکز بر این مسئله، به عنوان یک شرکتکننده در پروژه، این مقاله با تحلیل ویژگیهای عملیاتی قطع کنندههای قدیمی دستچرخ، یک دستگاه عملیات بسته شدن دوردست طراحی میکند تا خطرات ایمنی در طول عملیات دستی را اجتناب کند.
روش بسته شدن سنتی قطع کنندههای دستچرخ
در صفحه کنترل و ساختار دستچرخ قطع کنندههای دستچرخ (مانند شکل ۱)، میله چرخشی دستی روی سمت چپ صفحه با سطح مقطع شش ضلعی منظم قرار دارد. دسته عملیات Z-شکل است و از طریق یک آغوش شش ضلعی منظم در انتهای پایین به میله چرخشی متصل میشود. در طول عملیات، پس از قرار دادن دسته در میله چرخشی، چرخاندن انتهای بالایی در جهت عقربههای ساعت حدود ۲۴ دور عملیات بسته شدن قطع کننده را کامل میکند.
پایه محاسبه گشتاور و معیارهای طراحی
بر اساس ویژگیهای ساختاری دسته عملیات، نیاز گشتاور برای بسته شدن دستی قطع کننده میتواند با تعیین طول بازوی نیرو و پارامترهای نیروی کششی مشتق شود. بر اساس فرمول مکانیکی
از طریق تحلیل ویژگیهای عملیاتی، مقاومت چرخشی قطع کننده دستی در دور چرخش ۱۵ام به حداکثر میرسد. دادههای گشتاور کمینه در این نقطه میتواند کل فرآیند بسته شدن را پوشش دهد. طراحی گشتاور دستگاه بسته شدن دوردست باید با یک حاشیه ایمنی از این مقدار بحرانی فراتر رود تا تغییرات گشتاور در مدلهای مختلف قطع کننده را پوشش دهد. دادههای آزمایشی دقیق در بخشهای بعدی ارائه خواهد شد.
ساختار اساسی دستگاه بسته شدن دوردست
همانطور که در شکل ۲ نشان داده شده است، دستگاه شامل میله ثابت، اجزای متحرک، دستگاه الکتریکی و اتصال بسته شدن است. میله ثابت طراحی شده است تا قابل تنظیم باشد و صفحات پشتیبان در دو طرف آن لحیم شدهاند. در زمان نصب، ابتدا میله کوتاه شده و عموداً درون کابین قرار میگیرد، سپس بسط یافته و صفحات پشتیبان برای تثبیت افقی در مقابل کابین قرار میگیرند. اجزای متحرک در جهت عمودی تنظیم میشوند تا اتصال بسته شدن دستگاه الکتریکی با سر چرخش دستچرخ متناسب شود. پس از تنظیم، اپراتورها میتوانند به منطقه ایمن عقبنشینی کرده و از طریق فرستنده دوردست سیگنالی در جهت عقربههای ساعت ارسال کنند تا عملیات بسته شدن کامل شود.
اجرای کنترل و عملیات دوردست
انتخاب و پارامترهای موتور
در انتخاب ماژول موتور اصلی، موتورهای DC بدون برُش و موتورهای برُشدار مقایسه شدند. موتورهای بدون برُش در طول عمر و سطح نویز (≤55dB) مزایای قابل توجهی دارند، اما دارای مدارهای کنترل پیچیده و هزینههای بالاتر (40% بیشتر از موتورهای برُشدار) هستند. با توجه به عدم نیازهای دقیق دستگاه به کنترل موتور، موتور DC دائممغناطیسی برُشدار XD-3420 به دلیل کنترل ساده و هزینه کمتر انتخاب شد. پارامترهای کلیدی:
برای امکان عملیات کارکنان نگهداری از فاصله ایمن، دستگاه از مبدل بیسیم Qichip QA-R-010 برای مدیریت بیسیم انرژی استفاده میکند. مدول شامل فرستنده و گیرنده است: گیرنده ورودی DC از 3.6V تا 24V را پشتیبانی میکند، با سیمهای قرمز/مشکی برای ورودی مثبت/منفی و سیمهای آبی/خاکستری برای خروجی متناظر (ولتاژ خروجی با ورودی مطابقت دارد). فرستنده دو دکمهای سه حالت خروجی را ارائه میدهد: موقت، قفلشونده و قفلشونده متقابل. پروژه از حالت موقت استفاده میکند، که در آن مدول فقط در زمان فشار دادن دکمه رسانا میشود و با رها کردن دکمه به طور فوری قطع میشود تا نیازهای کنترل موقت در طول عملیات بسته شدن را برآورده کند.
آزمایش کنترل دوردست محلی
ما از یک دستگاه تست کشش برای اندازهگیری نیروی کششی مورد نیاز برای بسته شدن دستی یک قطع کننده دستچرخ خارج از خدمت استفاده کردیم. همانطور که در جدول 1 نشان داده شده است، وقتی بسته شدن دستچرخ به دور 15ام میرسد، نیروی کششی کمینه مورد نیاز برای بسته شدن دستی به حداکثر میرسد. با استفاده از این نیروی کششی، محاسبه شد که گشتاور کمینه مورد نیاز برای کل فرآیند بسته شدن دستچرخ 1.75 N·m است.
ما زمان عملیات روش بسته شدن دستی سنتی و دستگاه بسته شدن دوردست را مقایسه کردیم. جدول 2 نشان میدهد که استفاده از دستگاه بسته شدن دوردست نه تنها خطرات را اجتناب میکند، بلکه با عملیات دستی خالص کارایی عملیات را نیز کمی بهبود میبخشد. بدون افزایش هزینه زمانی، به طور قابل توجهی خطرات ایمنی کارکنان را کاهش میدهد.
برای حل مشکل خطرات ایمنی کارکنان نگهداری که نیاز دارند به قطع کنندههای دستچرخ قدیمی در شبکه توزیع فعلی نزدیک شوند، ما یک دستگاه کمکی پیشنهاد و توسعه دادیم. این دستگاه به کارکنان اجازه میدهد تا از قطع کننده فاصله بگیرند و بسته شدن قطع کننده را دوردست کنترل کنند. ما اجزای نرمافزاری و سختافزاری اساسی پروتاتیپ و نحوه استفاده از آن را به طور دقیق توضیح دادیم. آزمایشهای گشتاور نشان میدهد که این دستگاه کمکی بسته شدن دوردست نیازهای گشتاور بسته شدن قطع کنندههای دستچرخ را برآورده میکند. در مقایسه با روش عملیاتی سنتی، زمان عملیات مشابه است. این دستگاه خطرات نزدیک شدن کارکنان به چنین قطع کنندههایی را بدون افزایش هزینه زمانی اجتناب میکند و دارای ارزش کاربردی مهندسی خوبی است.










