
La cableació i soterrament de les línies elèctriques urbanes han esdevingut una tendència irreversible en la construcció de xarxes de distribució. Els aparells d'alta tensió, com a equipament central del sistema de distribució, han esdevingut l'objecte principal de la operació i manteniment diari per al personal de manteniment. Durant el procés d'iteració de l'equipament, la substitució i puesta en marcha completa de nou equipament té un cicle llarg, i encara hi ha en servei un tipus d'aparell d'alta tensió antic amb manivela manual.
A causa de l'operació a llarg termini, aquests aparells són propensos als riscos d'arc voltaic durant les operacions d'obertura i tancament. En escenaris reals de manteniment, quan falla l'operació elèctrica, es requereix el tancament manual per part del personal, exponint-los directament a amenaçes de seguretat degudes a l'arc voltaic. Per tant, és urgent desenvolupar un dispositiu de tancament remot per substituir l'operació manual com a mesura auxiliar de seguretat durant la transició de renovació de l'equipament.
Centrant-nos en aquest problema, com a participant del projecte, aquest article dissenya un dispositiu d'operació de tancament remot analitzant les característiques operatives dels antics interruptors amb manivela manual per evitar riscos de seguretat durant les operacions manuals.
Mètode de Tancament Tradicional d'Interruptors amb Manivela Manual
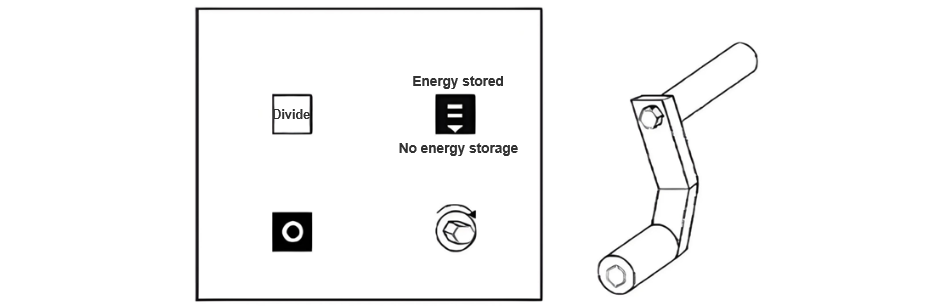
En el panell de control i la estructura de la manivela dels interruptors amb manivela (tal com es mostra en la Figura 1), la barra rotativa de tancament manual està situada a l'esquerra del panell amb una secció transversal hexagonal regular. La mànega d'operació té forma de Z, connectada a la barra rotativa mitjançant una mangera hexagonal regular a l'extrem inferior per una connexió plugable. Durante l'operació, després d'introduir la mà ala barra rotativa, girant l'extrem superior en sentit horari uns 24 voltes, es completa l'acció de tancament de l'interruptor.
Base de Càlcul de Parell i Criteris de Disseny
Basat en les característiques estructurals de la mà d'operació, es pot derivar el requisit de parell per al tancament manual de l'interruptor determinant la longitud del braç de força i els paràmetres de tracció. Segons la fórmula mecànica

A través de l'anàlisi de les característiques operatives, la resistència rotacional de l'interruptor operat manualment arriba al seu màxim al voltant del 15è cicle de rotació. Les dades de parell mínim a aquest punt poden cobrir tot el procés de tancament. El disseny del parell del dispositiu de tancament remot ha de superar aquest valor crític amb un marge de seguretat per acomodar les variacions de parell entre diferents models d'interruptors. Es presentaran dades de prova detallades en seccions posteriors.
Estructura Bàsica del Dispositiu de Tancament Remot
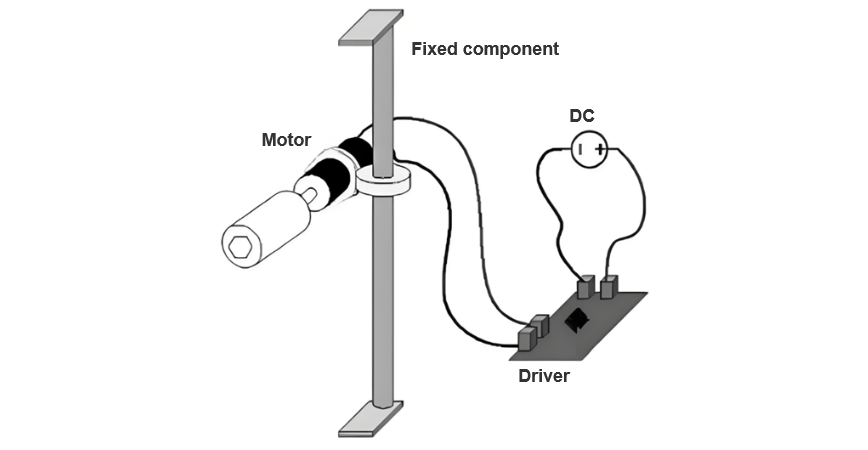
Com es mostra en la Figura 2, el dispositiu consta d'una barra fixa, components mòbils, un dispositiu elèctric i una junta de tancament. La barra fixa està dissenyada per ser telescòpica, amb plaques de suport soldades a ambdós costats. Durante la instal·lació, primer es curta la barra i es col·loca verticalment a l'armari, després s'estén per fer que les plaques de suport apoguin a l'armari per una fixació horitzontal. Els components mòbils s'ajusten en la direcció vertical per alinear la junta de tancament del dispositiu elèctric amb la cap de rotació de l'interruptor de carret. Després de la configuració, els operadors poden retirar-se a una zona segura i enviar un senyal en sentit horari a través del transmisor remot per completar l'operació de tancament.
Realització del Control i Operació Remots
Selecció i Paràmetres del Motor
En la selecció del mòdul de motor central, es van comparar motors DC brushless de magnet permanent i motors amb escovines. Els motors brushless oferen avantatges significatius en vida útil i nivell de soroll (≤55dB), però tenen circuits de control complexos i un cost superior (un 40% més que els de tipus amb escovines). Donat que el dispositiu no té requisits estrictes per al control del motor, es va triar el motor DC brush permanent magnet XD-3420 per la seva facilitat de control i baix cost. Paràmetres clau:
Per permetre al personal de manteniment operar des d'una distància segura, el dispositiu utilitza un interruptor de control remot sense fil Qichip QA-R-010 per a la gestió de l'energia. El mòdul consta d'un emissor i un receptor: el receptor admet una entrada CC de 3.6V a 24V, amb fils vermells/negres per entrades positives/negatives i fils blaus/grisos per sortides corresponents (la tensió de sortida coincideix amb la d'entrada). L'emissor de dos botons ofereix tres modes de sortida: momentani, de retenció i d'interbloqueig. El projecte utilitza el mode momentani, on el mòdul d'interruptor condueix només mentre es preme el botó, assegurant una desconexió instantània en la relació per complir els requisits de control transitori durant les operacions de tancament.
Experiment de control remot in situ

Hem utilitzat un probador de tracció per mesurar la força de tracció necessària per al tancament manual d'un interruptor de carret amb manivela ja retirat. Com es mostra a la Taula 1, quan el tancament manual arriba al voltant de la 15a volta, la força de tracció mínima necessària per al tancament manual arriba al seu valor màxim. Utilitzant aquesta força de tracció, hem calculat que el parell mínim necessari per tot el procés de tancament manual és de 1.75 N·m.

Hem comparat els temps d'operació del mètode de tancament manual tradicional i el dispositiu de tancament remot. La Taula 2 mostra que l'ús del dispositiu de tancament remot no només evita riscos sinó que també millora lleugerament l'eficiència operativa en comparació amb l'operació purament manual. Sense incrementar els costos de temps, reduïu significativament els riscos de seguretat dels operadors.
Per abordar el risc de seguretat del personal de manteniment que ha de manipular interruptors amb manivela antics a prop en la xarxa de distribució actual, hem proposat i desenvolupat un dispositiu auxiliar. Aquest permet al personal de manteniment mantenir-se a una distància de l'armari i controlar remotament el tancament de l'interruptor. Hem detallat els components bàsics de programari i maquinari del prototip i el seu ús. Les proves de parell mostren que aquest dispositiu auxiliar de tancament remot compleix els requisits de parell de tancament dels interruptors amb manivela. En comparació amb el mètode d'operació tradicional, el temps d'operació és similar. Evita els riscos del personal de manteniment que opera aquests interruptors a prop sense incrementar els costos de temps, i el dispositiu té un bon valor d'aplicació enginyeril.










