
Provjera i podzemljenje mreže električne energije u urbanim područjima postala je neobrnuta tendencija u izgradnji distribucijske mreže. Visokonaponska aparatura, kao ključna oprema distribucijskog sustava, postala je glavni predmet svakodnevnog održavanja i popravka za održavajuće osoblje. Tijekom procesa iteracije opreme, potpuna zamjena i komisioniranje nove opreme traje dugo, a stari ručni visokonaponski prekidači još uvijek su u upotrebi.
Zbog dugotrajne uporabe, takva oprema je sklonjena rizicima isparkavanja tijekom operacija otvaranja i zatvaranja. U stvarnim situacijama održavanja, kada električna operacija ne uspije, potrebno je ručno zatvaranje od strane osoblja, što ih izravno izlaguje sigurnosnim prijetnjama od isparkavanja. Stoga je izrazito važno razviti uređaj za daljinsko zatvaranje kako bi se zamijenila ručna operacija kao pomoćna sigurnosna mjera tijekom prijelaza na novu opremu.
Fokusirajući se na ovaj problem, kao sudionik projekta, ovaj rad dizajnira uređaj za daljinsku operaciju zatvaranja analizirajući karakteristike rada starih ručnih prekidača kako bi se izbjegli sigurnosni rizici tijekom ručnih operacija.
Tradicionalna metoda zatvaranja ručnih prekidača
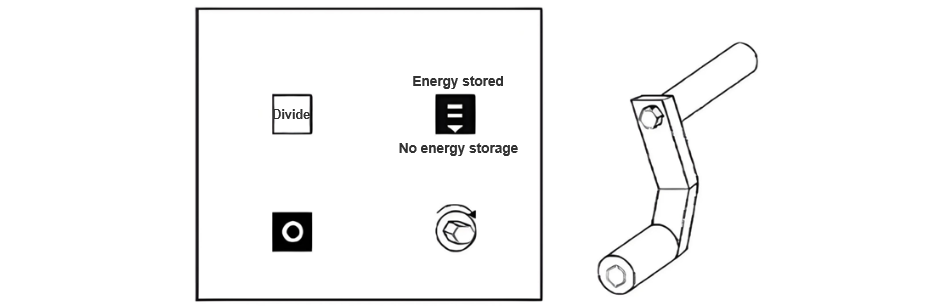
Na operativnoj ploči i strukturi ručnog prekidača (kao što je prikazano na Slici 1), rotacijski stub za ručno zatvaranje nalazi se s lijeve strane ploče sa pravilnim šesterokutnim presjekom. Operativna ručka je oblika Z, spojena je s rotacijskim stubom putem pravilne šesterokutne cevi na donjem kraju za spojivu vezu. Tijekom operacije, nakon umetanja ručke u rotacijski stub, okretanje gornjeg kraja u smjeru kazaljke na satu oko 24 puta dovršava akciju zatvaranja prekidača.
Bazna osnova za izračun vrtloga i kriteriji dizajna
Temeljem strukturnih karakteristika veznog operativnog rukoata, zahtjev za vrtlogom za ručno zatvaranje prekidača može se izvesti određivanjem duljine ramena sile i parametara povlačenja. Prema mehaničkoj formuli

Analizom karakteristika rada, otpor rotacije ručno operativnog prekidača dostiže vrhunac u 15. ciklusu rotacije. Minimalni podaci o vrtlogu u toj točki mogu pokriti cijeli proces zatvaranja. Dizajn vrtloga uređaja za daljinsko zatvaranje mora premašiti tu kritičnu vrijednost s sigurnosnim margonom kako bi se prilagodio varijacijama vrtloga između različitih modela prekidača. Detaljni testni podaci bit će prikazani u sljedećim odjeljcima.
Osnovna struktura uređaja za daljinsko zatvaranje
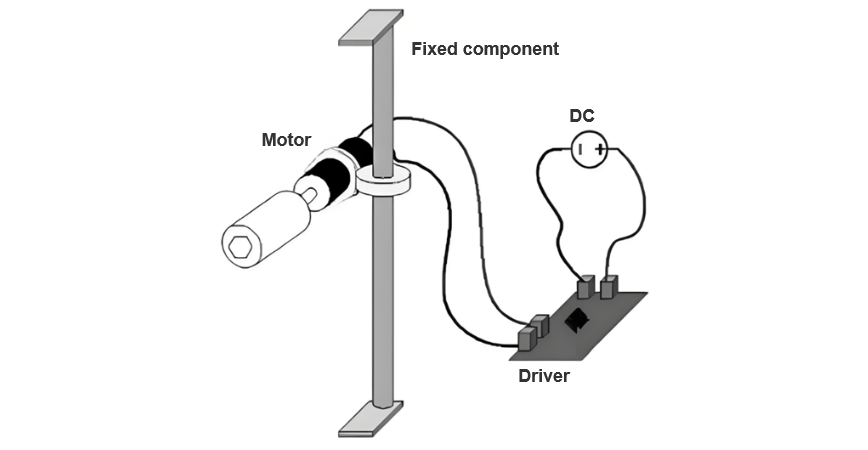
Kao što je prikazano na Slici 2, uređaj se sastoji od fiksiranog stuba, pokretnih dijelova, električnog uređaja i spojnog čvora. Fiksirani stub je dizajniran da bude teleskopski, s nosačima zavaranim na obje strane. Tijekom instalacije, stub se najprije skupi i postavi vertikalno u ormarić, zatim se proširi kako bi nosači propali protiv ormarića za horizontalnu fiksaciju. Pokretni dijelovi se prilagođavaju u vertikalnom smjeru kako bi spojni čvor električnog uređaja poravnali s rotacijskim glavom ručnog prekidača. Nakon konfiguracije, operatori se mogu povući u sigurno područje i poslati signal u smjeru kazaljke na satu putem daljinskog nadajnika kako bi dovršili operaciju zatvaranja.
Realizacija daljinske kontrole i operacije
Odabir motora i parametri
Pri odabiru ključnog motornog modula, uspoređeni su trajni magnetni bešičevani DC motori i bešičevani motori. Bešičevani motori nude značajne prednosti u životnom vijeku i razini buke (≤55dB), ali imaju složene kontrolne krugove i veće troškove (40% više od bešičevanih tipova). Uzimajući u obzir nedostatak strogih zahtjeva za kontrolom motora, odabran je XD-3420 trajni magnetni DC bešičevani motor zbog jednostavne kontrole i niskog troška. Ključni parametri:
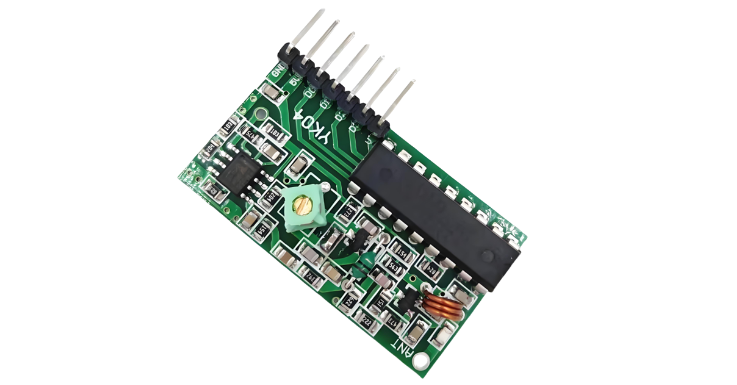
Kako bi se omogućilo održavajućem osoblju da operira s bezbedne udaljenosti, uređaj koristi Qichip QA-R-010 bezžični daljinski upravljački prekidač za bezžično upravljanje snagom. Modul se sastoji od nadajnika i prijemnika: prijemnik podržava DC ulaz od 3.6V do 24V, s crvenim/crnim vodovima za pozitivne/negativne ulaze i plavim/sivo-vrhovitim vodovima za odgovarajuće izlaze (napon izlaza odgovara ulazu). Dugmični nadajnik nudi tri načina izlaza: trenutni, zakačeni i uzajamni. Projekt koristi trenutni način, gdje modul prekidača provodi samo dok je dugme pritisnuto, što osigurava odmah prekid nakon puštanja kako bi se zadovoljili zahtjevi privremene kontrole tijekom operacija zatvaranja.
Eksperiment s daljinskom kontrolom na mjestu

Koristili smo tensiomjer za mjerenje sile povlačenja potrebne za ručno zatvaranje dekomisijonskog ručnog prekidača. Kao što je prikazano u Tablici 1, kada ručno zatvaranje doseže oko 15. kruga, minimalna sila povlačenja potrebna za ručno zatvaranje doseže svoju maksimalnu vrijednost. Koristeći tu silu povlačenja, izračunali smo da je minimalni vrtlog potreban za cijeli proces ručnog zatvaranja 1.75 N·m.

Usporedili smo vremena operacija tradicionalne ručne metode zatvaranja i uređaja za daljinsko zatvaranje. Tablica 2 pokazuje da uporaba uređaja za daljinsko zatvaranje ne samo što izbjegava rizike, već i blago poboljšava učinkovitost operacija u usporedbi s čisto ručnim operiranjem. Bez povećanja troškova vremena, značajno smanjuje sigurnosne rizike za operatore.
Da bismo riješili sigurnosni rizik održavajućeg osoblja koje treba operirati stari ručni prekidač bližom distancom u trenutnoj distribucijskoj mreži, predložili smo i razvili pomoćni uređaj. Omogućava održavajućem osoblju da ostanu udaljeni od prekidača i daljinski kontroliraju zatvaranje prekidača. Detaljno smo opisali osnovne softverske i hardverske komponente prototipa i njegovu upotrebu. Testovi vrtloga pokazuju da ovaj pomoćni uređaj za daljinsko zatvaranje zadovoljava zahtjeve za vrtlogom ručnih prekidača. U usporedbi s tradicionalnim metodama operiranja, vrijeme operacije je slično. Izbjegava rizike održavajućeg osoblja operirajući takvim prekidačima bližom distancom bez povećanja troškova vremena, a uređaj ima dobru inženjersku primjenjivost.










