
Прокладка кабелів та закладання міських електромереж у землю стали необерненим трендом у будівництві розподільчих мереж. Високовольтне комутаційне обладнання, як ключовий компонент системи розподілу, стало основним об'єктом повсякденного технічного обслуговування для техніків. Під час ітерації обладнання повний процес заміни та введення нового обладнання займає довгий період, і деякі старі ручні високовольтні комутатори ще залишаються в експлуатації.
Завдяки довготривалій роботі такі комутатори підвержені ризику дугових стріл під час операцій відключення та включення. У реальних умовах технічного обслуговування, коли електрична операція не вдається, необхідне ручне включення, що безпосередньо ставить операторів перед безпековою загрозою від дугових стріл. Тому надзвичайно важливо розробити пристрій для віддаленого включення, який замінить ручну операцію як допоміжну безпекову заходу під час переходу на нове обладнання.
Оrienтування на цю проблему, як учасник проекту, ця робота проектує пристрій для віддаленої операції включення, аналізуючи характеристики роботи старих ручних вимикачів, щоб уникнути безпечної загрози під час ручних операцій.
Традиційний метод включення ручних вимикачів
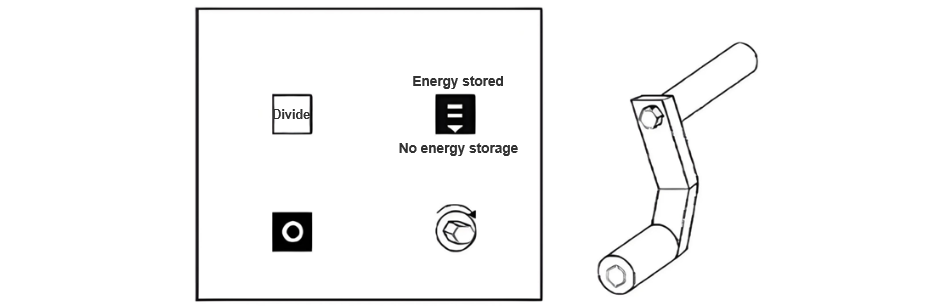
У панелі управління та механізмі ручного вимикача (як показано на рисунку 1) ручний включаючий вал знаходиться зліва на панелі з правильним шестикутним перерізом. Ручка управління має форму Z, зʼєднана з включаючим валом через правильний шестикутний патрон нижньою частиною для зʼєднання за принципом "плаг-і-плей". Під час операції, після вставляння ручки у включаючий вал, поворот верхньої частини за годинниковою стрілкою приблизно на 24 кола завершує операцію включення вимикача.
Основи розрахунку моменту та критерії проектування
На основі конструктивних характеристик зв'язкової ручки управління можна визначити вимоги до моменту сили для ручного включення вимикача, визначивши довжину плеча сили та параметри тяги. Відповідно до механічної формули

За результатами аналізу характеристик роботи, опорна сила ручного вимикача досягає свого піку на 15-му циклі обертання. Мінімальні дані моменту на цьому етапі можуть покрити весь процес включення. Дизайн моменту віддаленого пристрою для включення повинен перевищувати це критичне значення з запасом безпеки, щоб врахувати варіації моменту між різними моделями вимикачів. Детальні тести будуть представлені в наступних розділах.
Основна конструкція віддаленого пристрою для включення
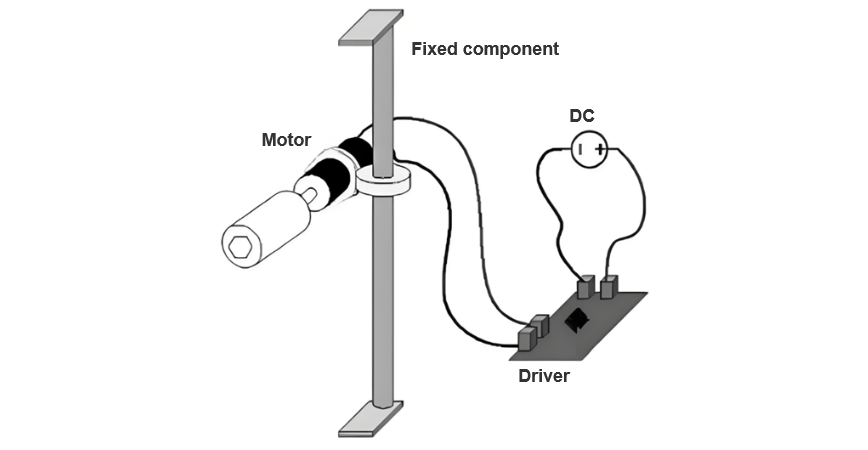
Як показано на рисунку 2, пристрій складається з фіксованого стержня, рухомих компонентів, електричного пристрою та зʼєднуючого сполучення. Фіксований стержень розроблений таким чином, що може бути телескопічним, з опорними плитами, звареними з обох сторін. Під час встановлення стержень спочатку скорочується і вертикально вставляється в шафу, потім розтягується, щоб опорні плити опиралися на шафу для горизонтального фіксування. Рухомі компоненти налаштовуються в вертикальному напрямку, щоб зʼєднуюче сполучення електричного пристрою вирівнювалось з обертаючою головкою ручного вимикача. Після налаштування оператори можуть відійти в безпечну зону і відправити сигнал за годинниковою стрілкою через віддалений передавач, щоб завершити операцію включення.
Реалізація віддаленого керування та операції
Вибір та параметри двигуна
При виборі ключового модуля двигуна порівняли безщіткові колективні двигуни постійного струму та щіткові двигуни. Безщіткові двигуни мають значні переваги у терміні служби та рівні шуму (≤55dB), але мають складні схеми керування та вищий вартість (на 40% більше, ніж щіткові типи). З урахуванням невисоких вимог до керування двигуном, було обрано двигун XD-3420 з постійним магнітом та щітками через простоту керування та низьку вартість. Основні параметри:
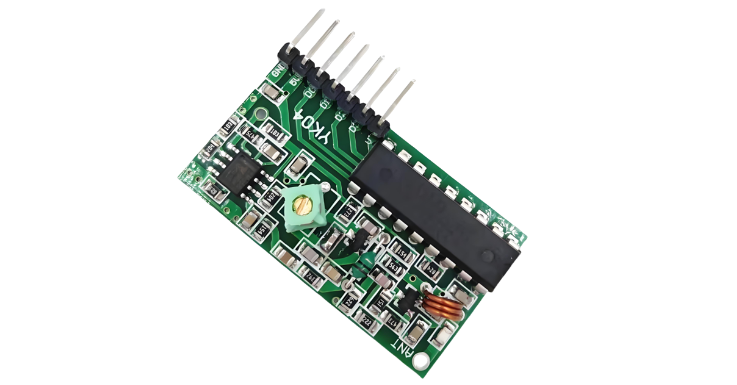
Для того, щоб дозволити технікам проводити операції з безпечного відстані, пристрій використовує віддалений керувальний переключач Qichip QA-R-010 для бездротового управління живленням. Модуль складається з передавача та приймача: приймач підтримує DC входи від 3.6V до 24V, з червоними/чорними дротами для позитивних/негативних входів та блакитними/сірими дротами для відповідних виходів (напруга виходу відповідає входу). Двокнопковий передавач пропонує три режими виходу: короткотривалі, зачеплювальні та взаємозамінні. Проект використовує короткотривалий режим, де модуль переключника проводить лише тоді, коли кнопка натиснута, забезпечуючи моментальне відключення при відпусканні, щоб задовольнити вимоги до тимчасового керування під час операцій включення.
Експеримент з віддаленого керування на місці

Ми використовували тензометр для вимірювання сили, необхідної для ручного включення виведеного з експлуатації ручного вимикача. Як показано в таблиці 1, коли ручне включення досягає приблизно 15-го кола, мінімальна сила, необхідна для ручного включення, досягає свого максимального значення. Використовуючи цю силу, ми розрахували, що мінімальний момент, необхідний для всього процесу ручного включення, становить 1.75 Н·м.

Ми порівняли час операцій традиційного ручного методу включення та віддаленого пристрою для включення. Таблиця 2 показує, що використання віддаленого пристрою для включення не тільки уникнення ризиків, але й трохи підвищує ефективність операцій порівняно з чисто ручним управлінням. Без збільшення витрат часу, воно значно зменшує безпецеві ризики для операторів.
Для вирішення безпечної загрози, пов'язаної з необхідністю проведення операцій зі старими ручними вимикачами, ми запропонували та розробили допоміжний пристрій. Це дозволяє технікам зберігати відстань від комутаційного обладнання та віддалено керувати включенням вимикача. Ми детально описали основні програмні та апаратні компоненти прототипу та його використання. Тестові моменти показують, що цей допоміжний пристрій для віддаленого включення задовольняє вимоги до моменту включення ручних вимикачів. Порівняно з традиційним методом операцій, час операцій подібний. Це уникнення ризиків, пов'язаних з проведеннем операцій з такими вимикачами, без збільшення витрат часу, і пристрій має добре інженерне застосування.










