
Η κατάρτιση και η υπόγεια εγκατάσταση των γραμμών του πολεοδοτικού ηλεκτρικού δικτύου έχουν γίνει μια αναστρέψιμη τάση στην κατασκευή των διανομικών δικτύων. Το υψηλής τάσης στροφόρο, ως το κύριο εξοπλισμό του συστήματος διανομής, έχει γίνει το βασικό αντικείμενο της καθημερινής λειτουργίας και συντήρησης για το προσωπικό συντήρησης. Κατά τη διάρκεια της διαδικασίας ανανέωσης εξοπλισμού, η ολοκληρωμένη αντικατάσταση και η εναπόθεση νέου εξοπλισμού έχουν μεγάλο κύκλο, και ένα είδος παλαιού χειροκίνητου υψηλής τάσης στροφόρου είναι ακόμα σε λειτουργία.
Λόγω μακροχρόνιας λειτουργίας, τέτοιο στροφόρο είναι ευάλωτο σε προβλήματα ανάφλεξης κατά την ενεργοποίηση και την απενεργοποίηση. Σε πρακτικές συνθήκες συντήρησης, όταν αποτυγχάνει η ηλεκτρική λειτουργία, απαιτείται χειροκίνητη ενεργοποίηση από το προσωπικό, το οποίο εκτίθεται άμεσα σε απειλές ασφαλείας από την ανάφλεξη. Συνεπώς, η ανάπτυξη ενός τηλεχειριζόμενου συστήματος ενεργοποίησης για την αντικατάσταση της χειροκίνητης λειτουργίας ως επιπλέον μέτρο ασφαλείας κατά τη διάρκεια της μεταβατικής περιόδου ανανέωσης του εξοπλισμού είναι επιτακτική.
Στοχεύοντας σε αυτό το θέμα, ως συμμετέχων στο έργο, αυτό το έγγραφο σχεδιάζει ένα τηλεχειριζόμενο συστήματα ενεργοποίησης, αναλύοντας τα χαρακτηριστικά λειτουργίας των παλαιών χειροκίνητων στροφόρων, για να αποφύγει τους κινδύνους ασφαλείας κατά την χειροκίνητη λειτουργία.
Παραδοσιακή Μέθοδος Ενεργοποίησης Χειροκίνητων Στροφόρων
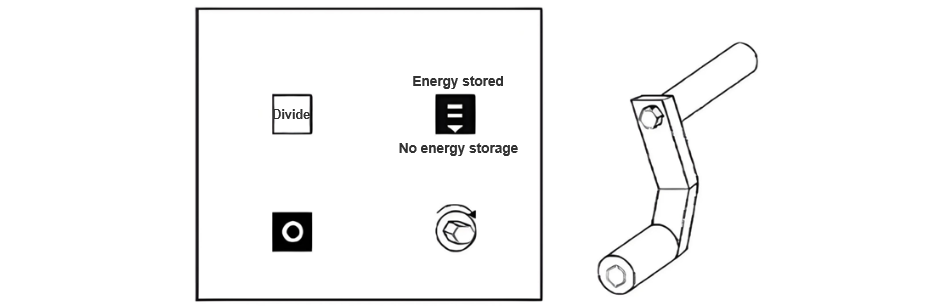
Στην επιφάνεια ελέγχου και τη δομή του κρανού των χειροκίνητων στροφόρων (όπως φαίνεται στο Σχήμα 1), το χειροκίνητο στροφόρο είναι στο αριστερό μέρος της επιφάνειας με κανονικό εξάγωνο τομέα. Το χειριστήριο είναι Z-μορφής, συνδεδεμένο με το στροφόρο μέσω εξαγωνίου σωλήνα στο κάτω μέρος για προσωπική σύνδεση. Κατά τη λειτουργία, μετά την εισαγωγή του χειριστηρίου στο στροφόρο, η περιστροφή του κάτω μέρους περίπου 24 φορές ολοκληρώνει την ενέργεια ενεργοποίησης του στροφόρου.
Βάση Υπολογισμού Ροπής και Κριτήρια Σχεδίασης
Βάσει των δομικών χαρακτηριστικών του συνδεδεμένου χειριστηρίου, η απαίτηση ροπής για την χειροκίνητη ενεργοποίηση του στροφόρου μπορεί να προκύψει καθορίζοντας το μήκος του βραχίονα δύναμης και τα παράμετρα της στραφής. Σύμφωνα με τη μηχανική τύπο

Μέσω της ανάλυσης των χαρακτηριστικών λειτουργίας, η αντίσταση περιστροφής του χειροκίνητου στροφόρου φτάνει στο ακροτάτο της κατά την 15η περιστροφή. Οι ελάχιστες δεδομένες ροπής σε αυτό το σημείο μπορούν να καλύψουν ολόκληρη τη διαδικασία ενεργοποίησης. Η σχεδίαση της ροπής του τηλεχειριζόμενου συστήματος ενεργοποίησης πρέπει να υπερβαίνει αυτή τη κρίσιμη τιμή με περιθώριο ασφαλείας για να εξυπηρετήσει τις διαφορές ροπής μεταξύ διαφορετικών μοντέλων στροφόρων. Αναλυτικά δεδομένα θα παρουσιαστούν σε επόμενες ενότητες.
Βασική Δομή του Τηλεχειριζόμενου Συστήματος Ενεργοποίησης
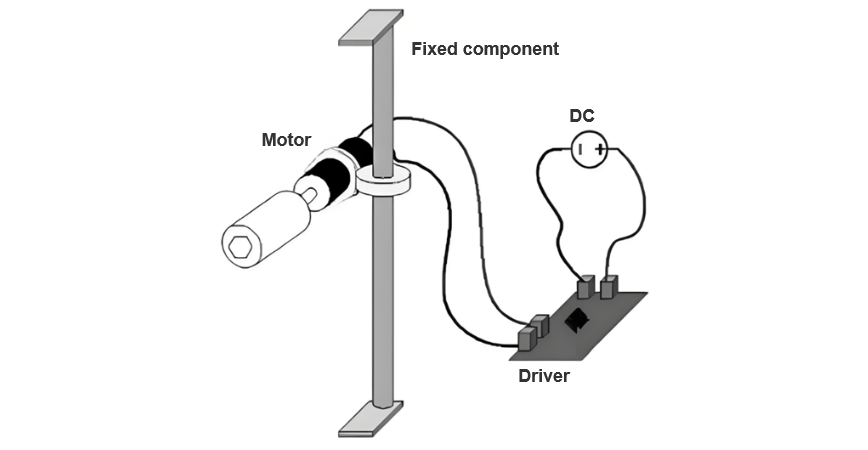
Όπως φαίνεται στο Σχήμα 2, το συστήμα αποτελείται από έναν σταθερό στροφόρο, κινούμενα στοιχεία, ηλεκτρικό συστήμα και σύνδεση ενεργοποίησης. Ο σταθερός στροφόρος είναι σχεδιασμένος να είναι τελεστικός, με πλάκες υποστήριξης συγκολλημένες στα δύο πλευρά. Κατά την εγκατάσταση, ο στροφόρος πρώτα μειώνεται και τοποθετείται κατακόρυφα στο περίβλημα, μετά επεκτείνεται για να στηρίξει τις πλάκες υποστήριξης στο περίβλημα για κατακόρυφη σταθεροποίηση. Τα κινούμενα στοιχεία προσαρμόζονται κατακόρυφα για τον συντονισμό της σύνδεσης ενεργοποίησης του ηλεκτρικού συστήματος με την κεφαλή περιστροφής του στροφόρου. Μετά την προσαρμογή, οι τεχνικοί μπορούν να αποσυρθούν σε ασφαλή περιοχή και να στείλουν ένα σήμα περιστροφής με την τηλεχειριζόμενη μεταφορτώση για την ολοκλήρωση της ενέργειας ενεργοποίησης.
Αποτελεσματική Τηλεχειρισμός και Λειτουργία
Επιλογή και Παράμετροι Μοτέρ
Κατά την επιλογή του κεντρικού μοντούλου μοτέρ, συγκρίθηκαν οι μόνιμοι μαγνήτες DC μοτέρ χωρίς ζευγάρια και οι μοτέρ με ζευγάρια. Οι μοτέρ χωρίς ζευγάρια παρέχουν σημαντικά πλεονεκτήματα στη διάρκεια ζωής και το επίπεδο θορύβου (≤55dB), αλλά διαθέτουν περίπλοκες κυκλώματα ελέγχου και υψηλότερο κόστος (40% περισσότερο από τους μοτέρ με ζευγάρια). Λόγω των μη αυστηρών απαιτήσεων ελέγχου του μοτέρ, επιλέχθηκε ο XD-3420 μόνιμος μαγνήτης DC μοτέρ με ζευγάρια για την απλή διαχείριση και το χαμηλό κόστος. Κύριοι παράμετροι:
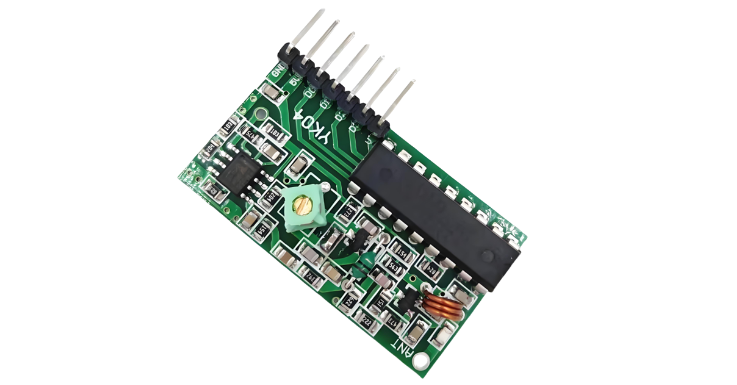
Για να επιτρέψει στο προσωπικό συντήρησης να λειτουργεί από ασφαλή απόσταση, το συστήμα χρησιμοποιεί το Qichip QA-R-010 τηλεχειριζόμενο σύστημα ενεργοποίησης για την τηλεχειριζόμενη διαχείριση ενέργειας. Το μόντουλο αποτελείται από μεταδότη και παραλήπτη: ο παραλήπτης υποστηρίζει DC εισόδους από 3.6V έως 24V, με κόκκινα/μαύρα καλώδια για θετικές/αρνητικές εισόδους και μπλε/γκρι καλώδια για αντίστοιχες εξόδους (η εξόδους τάση αντιστοιχεί στην είσοδο). Ο δύο κουμπιών μεταδότης παρέχει τρεις εξόδους λειτουργίας: προσωρινή, μόνιμη και συνδεδεμένη. Το έργο χρησιμοποιεί την προσωρινή λειτουργία, όπου το μόντουλο ενεργοποιείται μόνο κατά τη διάρκεια της πίεσης του κουμπιού, εξασφαλίζοντας αμέση αποσύνδεση μετά την απόπειρα, για να εξυπηρετήσει τις απαιτήσεις προσωρινού ελέγχου κατά τη διάρκεια της ενεργοποίησης.
Επιχειρησιακή πείρα τηλεχειριζόμενου ελέγχου

Χρησιμοποιήσαμε ένα διατεταγμένο δοκιμαστικό σύστημα για να μετρήσουμε τη δύναμη στροφής που απαιτείται για την χειροκίνητη ενεργοποίηση ενός εκτελεσμένου χειροκίνητου στροφόρου. Όπως φαίνεται στο Πίνακα 1, όταν η χειροκίνητη ενεργοποίηση φτάνει περίπου στην 15η περιστροφή, η ελάχιστη δύναμη στροφής που απαιτείται για την χειροκίνητη ενεργοποίηση φτάνει στην κορυφαία της. Χρησιμοποιώντας αυτή τη δύναμη, υπολογίσαμε ότι η ελάχιστη ροπή που απαιτείται για ολόκληρη τη διαδικασία χειροκίνητης ενεργοποίησης είναι 1.75 N·m.

Συγκρίναμε τους χρόνους λειτουργίας της παραδοσιακής μεθόδου χειροκίνητης ενεργοποίησης και του τηλεχειριζόμενου συστήματος ενεργοποίησης. Ο Πίνακας 2 δείχνει ότι η χρήση του τηλεχειριζόμενου συστήματος ενεργοποίησης, εκτός από την αποφυγή κινδύνων, επίσης βελτιώνει ελαφρώς την αποτελεσματικότητα λειτουργίας σε σύγκριση με την απλά χειροκίνητη λειτουργία. Χωρίς αύξηση του κόστους χρόνου, μειώνει σημαντικά τους κινδύνους ασφαλείας των τεχνικών.
Για να αντιμετωπίσει τον κίνδυνο ασφαλείας των τεχνικών συντήρησης που χρειάζεται να λειτουργήσουν παλαιούστυλους χειροκίνητους στροφόρους από κοντινή απόσταση στο τρέχον διανομικό δίκτυο, πρότειναμε και αναπτύξαμε ένα συνδρομικό σύστημα. Αυτό επιτρέπει στους τεχνικούς να κρατήσουν απόσταση από τον στροφόρο και να τον ελέγξουν τηλεχειριζόμενα. Αναλύσαμε τα βασικά λογισμικά και υλικά στοιχεία του πρωτότυπου και τη χρήση του. Οι δοκιμές ροπής δείχνουν ότι αυτό το συνδρομικό τηλεχειριζόμενο σύστημα ενεργοποίησης πληροί τις απαιτήσεις ροπής των χειροκίνητων στροφόρων. Σε σύγκριση με την παραδοσιακή μέθοδο λειτουργίας, ο χρόνος λειτουργίας είναι παρόμοιος. Αποφεύγει τους κινδύνους των τεχνικών που λειτουργούν τέτοιους στροφόρους από κοντινή απόσταση χωρίς αύξηση του κόστους χρόνου, και το σύστημα έχει καλή επιστημονική και τεχνική αξία εφαρμογής.










