
A cablagem e a colocação subterrânea de linhas de rede elétrica urbana tornaram-se uma tendência irreversível na construção de redes de distribuição. O equipamento de comutação de alta tensão, como o equipamento central do sistema de distribuição, tornou-se o principal objeto de operação e manutenção diária para os técnicos de manutenção. Durante o processo de iteração do equipamento, a substituição completa e a comissionamento de novo equipamento têm um ciclo longo, e um tipo de equipamento de comutação de alta tensão manual ainda está em serviço.
Devido à operação de longo prazo, esse tipo de equipamento de comutação é propenso a riscos de arco durante as operações de abertura e fechamento. Em cenários de manutenção práticos, quando a operação elétrica falha, é necessário o fechamento manual por pessoal, expondo-os diretamente a ameaças de segurança devido ao arco. Portanto, desenvolver um dispositivo de fechamento remoto para substituir a operação manual como medida de segurança auxiliar durante a transição de atualização do equipamento é urgente.
Focando nessa questão, como participante do projeto, este artigo projeta um dispositivo de operação de fechamento remoto analisando as características operacionais dos disjuntores manuais antigos para evitar riscos de segurança durante as operações manuais.
Método de Fechamento Tradicional de Disjuntores Manuais
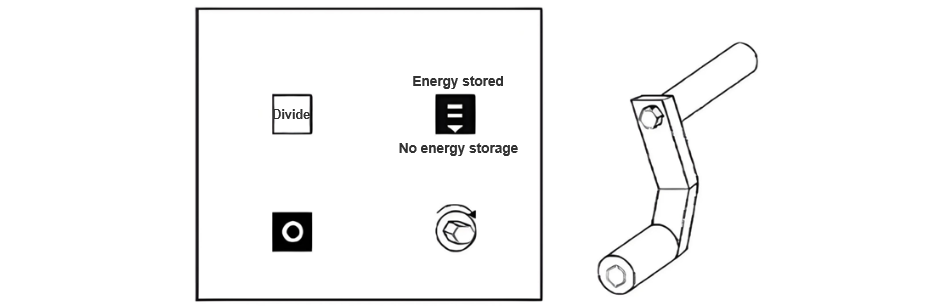
No painel de operação e na estrutura da manivela dos disjuntores manuais (como mostrado na Figura 1), a haste rotativa manual está localizada no lado esquerdo do painel com seção transversal hexagonal regular. A alavanca de operação tem forma de Z, conectada à haste rotativa por meio de um soquete hexagonal regular na extremidade inferior para conexão plugável. Durante a operação, após inserir a alavanca na haste, girar a extremidade superior no sentido horário cerca de 24 voltas completa a ação de fechamento do disjuntor.
Base de Cálculo de Torque e Critérios de Projeto
Com base nas características estruturais da alavanca de operação acoplada, a exigência de torque para o fechamento manual do disjuntor pode ser derivada determinando o comprimento do braço de força e os parâmetros de força de tração. De acordo com a fórmula mecânica

Através da análise das características operacionais, a resistência rotacional do disjuntor operado manualmente atinge seu pico no 15º ciclo de rotação. Os dados de torque mínimo neste ponto podem cobrir todo o processo de fechamento. O design de torque do dispositivo de fechamento remoto deve superar esse valor crítico com uma margem de segurança para acomodar variações de torque entre diferentes modelos de disjuntores. Dados de teste detalhados serão apresentados nas seções subsequentes.
Estrutura Básica do Dispositivo de Fechamento Remoto
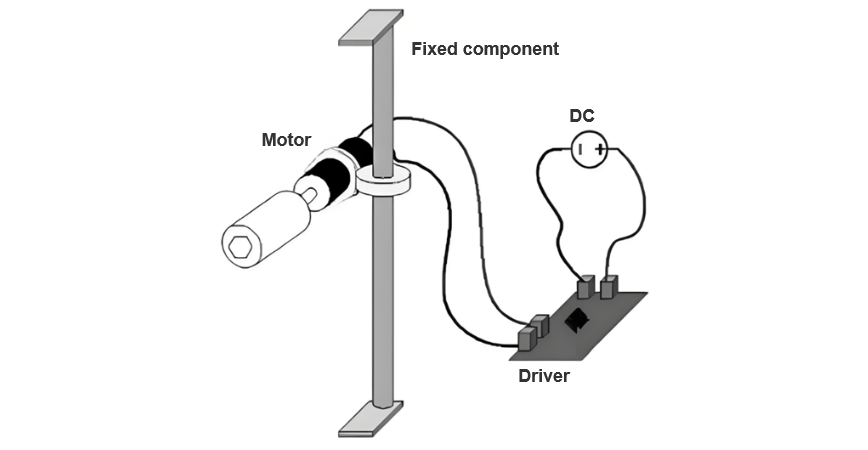
Como mostrado na Figura 2, o dispositivo consiste em uma haste fixa, componentes móveis, dispositivo elétrico e junta de fechamento. A haste fixa é projetada para ser telescópica, com placas de suporte soldadas em ambos os lados. Durante a instalação, a haste é primeiro encurtada e colocada verticalmente no gabinete, então estendida para que as placas de suporte apoiem o gabinete para fixação horizontal. Os componentes móveis são ajustados na direção vertical para alinhar a junta de fechamento do dispositivo elétrico com a cabeça rotativa do disjuntor de carrinho. Após a configuração, os operadores podem se retirar para uma área segura e enviar um sinal no sentido horário via transmissor remoto para completar a operação de fechamento.
Realização do Controle e Operação Remota
Seleção e Parâmetros do Motor
Na seleção do módulo de motor central, foram comparados motores DC sem escova de ímã permanente e motores com escova. Os motores sem escova oferecem vantagens significativas em vida útil e nível de ruído (≤55dB), mas apresentam circuitos de controle complexos e custos mais altos (40% a mais que os tipos com escova). Considerando as exigências não rigorosas do dispositivo para o controle do motor, o motor DC com escova XD-3420 foi escolhido por sua simplicidade de controle e baixo custo. Parâmetros-chave:
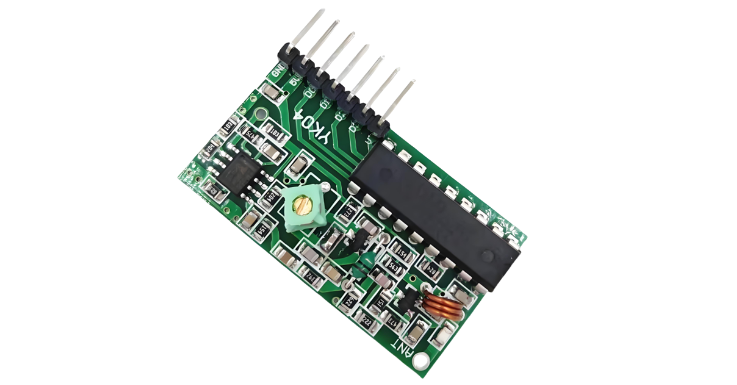
Para permitir que os técnicos de manutenção operem a uma distância segura, o dispositivo utiliza um interruptor de controle remoto sem fio Qichip QA-R-010 para gerenciamento de energia sem fio. O módulo consiste em um transmissor e um receptor: o receptor suporta entrada DC de 3,6V a 24V, com fios vermelho/preto para entradas positivas/negativas e azul/cinzento para saídas correspondentes (a tensão de saída corresponde à de entrada). O transmissor de dois botões oferece três modos de saída: momentâneo, travado e intertravado. O projeto utiliza o modo momentâneo, onde o módulo de interruptor conduz apenas enquanto o botão está pressionado, garantindo desconexão imediata ao soltar, atendendo aos requisitos de controle transitório durante as operações de fechamento.
Experimento de controle remoto no local

Utilizamos um teste de tração para medir a força de tração necessária para o fechamento manual de um disjuntor de carrinho manual desativado. Como mostrado na Tabela 1, quando o fechamento manual atinge aproximadamente a 15ª volta, a força de tração mínima necessária para o fechamento manual atinge seu valor máximo. Usando essa força de tração, calculamos que o torque mínimo necessário para todo o processo de fechamento manual é de 1,75 N·m.

Comparamos os tempos de operação do método tradicional de fechamento manual e do dispositivo de fechamento remoto. A Tabela 2 mostra que, usando o dispositivo de fechamento remoto, não apenas se evitam riscos, mas também há uma ligeira melhoria na eficiência operacional em comparação com a operação puramente manual. Sem aumentar os custos de tempo, reduz significativamente os riscos de segurança para os operadores.
Para abordar o risco de segurança dos técnicos de manutenção precisarem operar disjuntores manuais antigos de perto na rede de distribuição atual, propusemos e desenvolvemos um dispositivo auxiliar. Ele permite que os técnicos de manutenção mantenham distância do quadro de distribuição e controlem remotamente o fechamento do disjuntor. Detalhamos os componentes básicos de software e hardware do protótipo e seu uso. Testes de torque mostram que este dispositivo auxiliar de fechamento remoto atende aos requisitos de torque de fechamento dos disjuntores manuais. Comparado com o método de operação tradicional, o tempo de operação é semelhante. Evita os riscos de os técnicos de manutenção operarem tais disjuntores de perto, sem aumentar os custos de tempo, e o dispositivo tem bom valor de aplicação engenhosa.










