
Postavljanje kablova i podzemljenje linija gradske električne mreže postalo je neokrenuti trend u izgradnji distribucijske mreže. Visokonaponski prekidači, kao ključna oprema distribucijskog sistema, postali su glavni predmet svakodnevnog održavanja i popravka za održavajuće osoblje. Tijekom procesa iteracije opreme, ciklus potpune zamjene i komisijalizacije nove opreme je dug, a stari ručno okretani visokonaponski prekidači još uvijek su u upotrebi.
Zbog dugotrajne upotrebe, takvi prekidači su nagnuti na rizik od iskričenja tijekom radnji otvaranja i zatvaranja. U praktičnim situacijama održavanja, kada električna upravljanje ne uspije, potrebno je ručno zatvaranje od strane osoblja, što ih direktno izlaguje sigurnosnim prijetnjama od iskričenja. Stoga je izrazito nužno razviti uređaj za daljinsko zatvaranje kako bi se zamenio ručnom upravljanju kao pomoćna sigurnosna mjera tijekom prijelaza na novu opremu.
Fokusirajući se na ovaj problem, kao sudionik projekta, ovaj rad dizajnira uređaj za daljinsko zatvaranje analizirajući operativne karakteristike starih ručno okretanih prekidača kako bi se izbegli sigurnosni rizici tijekom ručnih operacija.
Tradicionalna metoda zatvaranja ručno okretanih prekidača
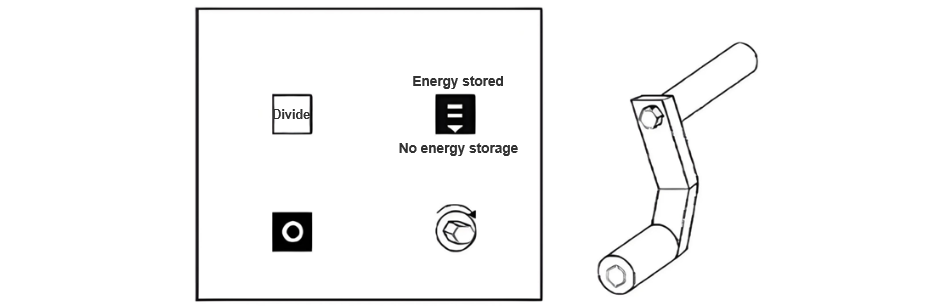
Na operativnoj ploči i strukturi okretanja ručno okretanih prekidača (kao što je prikazano na Slici 1), rotacijski valjak za ručno zatvaranje nalazi se s lijeve strane ploče sa pravilnim šesterokutnim presjekom. Operativni čivat ima Z-oblik, spojen s rotacijskim valjakom putem pravilne šesterokutne cevi na donjem kraju za spajanje na umetanje. Tijekom operacije, nakon umetanja čivata u rotacijski valjak, okretanjem gornjeg kraja u smjeru kazaljke na satu oko 24 puta dovršava se radnja zatvaranja prekidača.
Bazna osnova za izračunavanje momenata sile i kriteriji dizajna
Na osnovu strukturnih karakteristika mehaničkog čivata, zahtjev za momentom sile za ručno zatvaranje prekidača može se izvesti određivanjem dužine ramena sile i parametara povlačenja. Prema mehaničkoj formuli

Analizom operativnih karakteristika, otpor rotacije ručno upravljanih prekidača dostiže vrhunac u 15. ciklusu okretanja. Minimalni podaci o momentu sile u toj tački mogu pokriti cijeli postupak zatvaranja. Dizajn momenta sile uređaja za daljinsko zatvaranje mora premašiti tu ključnu vrijednost s maržom sigurnosti kako bi se prilagodili varijacije momenata sile među različitim modelima prekidača. Detaljne testne podatke predstavit će se u sljedećim odjeljcima.
Osnovna struktura uređaja za daljinsko zatvaranje
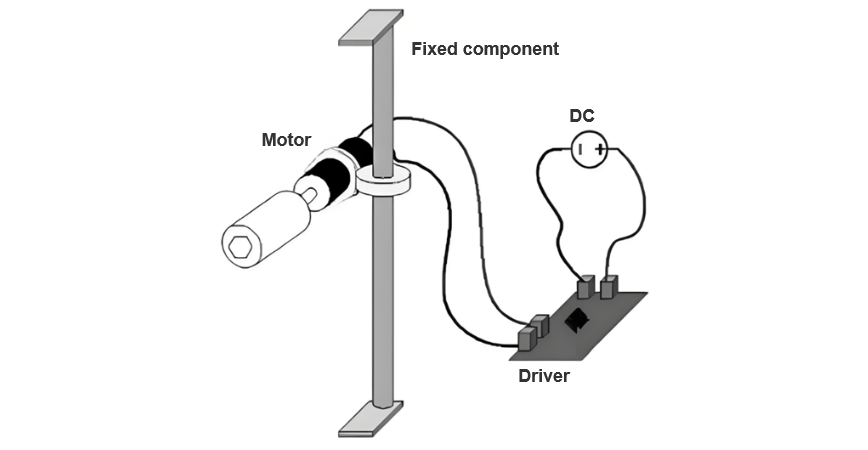
Kao što je prikazano na Slici 2, uređaj se sastoji od fiksne šipke, pokretnih komponenti, električnog uređaja i spojnog čvora za zatvaranje. Fiksna šipka je dizajnirana da bude teleskopija, s nosačima zavarenih na obje strane. Tijekom instalacije, šipka se najprije skraćuje i postavlja vertikalno u ormarić, zatim se proširi kako bi nosači podržali ormarić za horizontalnu fiksaciju. Pokretni elementi se podešavaju u vertikalnom smjeru kako bi se spojni čvor električnog uređaja poravnala s rotacijskim glavom ručnog prekidača. Nakon konfiguracije, operateri se mogu povući u sigurnu zonu i poslati signal u smjeru kazaljke na satu putem daljinskog predača kako bi dovršili radnju zatvaranja.
Realizacija daljinske kontrole i operacije
Odabir motora i parametri
U odabiru ključnog modula motora, uspoređivali smo trajne magnetne bešćetnice DC motor i motor s četkicama. Motori bez četkica nude značajne prednosti u pogledu vijeka trajanja i razina buke (≤55dB), ali imaju složene kontrolne krugove i veće troškove (40% više od motora s četkicama). Uzimajući u obzir nezahtjevne zahtjeve uređaja za kontrolu motora, odabrao se XD-3420 trajan magnetski DC motor s četkicama zbog jednostavne kontrole i niskih troškova. Ključni parametri:
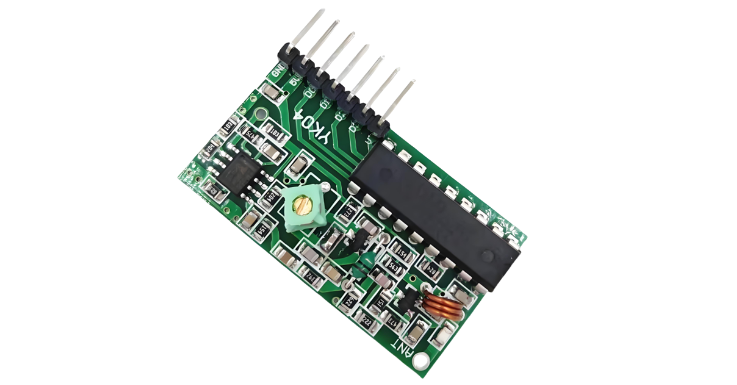
Da bi se omogućilo održavajućem osoblju da operira na sigurnoj udaljenosti, uređaj koristi Qichip QA-R-010 bežični daljinski prekidač za upravljanje energijom. Modul se sastoji od predača i primača: primač podržava ulazni napon od 3.6V do 24V, s crvenim/crnim žicama za pozitivne/negativne unose i plavim/sivo žicama za odgovarajuće izlaze (izlazni napon odgovara ulazu). Dvogumbasti predač nudi tri načina izlaza: trenutni, zaključni i uzajamni. Projekt koristi trenutni način, gdje modul prekidača provodi samo dok se gumb pritisne, osiguravajući odmah odvojenu vezu nakon puštanja kako bi se ispunili zahtjevi za privremenom kontrolom tijekom radnji zatvaranja.
Eksperiment s daljinskom kontrolom na terenu

Koristili smo tensiomer za mjeru povlačne sile potrebne za ručno zatvaranje demontiranog ručno okretanog prekidača. Kao što je prikazano u Tabeli 1, kada ručno zatvaranje doseže oko 15. kruga, minimalna povlačna sila potrebna za ručno zatvaranje dostiže svoju maksimalnu vrijednost. Koristeći tu povlačnu silu, izračunali smo da je minimalni moment sile potreban za cijeli postupak ručnog zatvaranja 1.75 N·m.

Uporedili smo vremena operacija tradicionalne ručne metode zatvaranja i uređaja za daljinsko zatvaranje. Tabela 2 pokazuje da korištenje uređaja za daljinsko zatvaranje ne samo što izbjegava rizike, već i malo poboljšava efikasnost operacija u usporedbi s čisto ručnim upravljanjem. Bez povećanja troškova vremena, znatno smanjuje sigurnosne rizike operatera.
Da bi se riješio sigurnosni rizik održavajućeg osoblja koje treba operirati starim ručno okretanim prekidačima blizu u trenutnoj distribucijskoj mreži, predložili i razvili smo pomoćni uređaj. Omogućava održavajućem osoblju da zadrži udaljenost od prekidača i daljinski kontrolira zatvaranje prekidača. Podrobno smo opisali osnovne softverske i hardverske komponente prototipa i njegovu upotrebu. Testovi momenata sile pokazuju da ovaj pomoćni uređaj za daljinsko zatvaranje zadovoljava zahtjeve za momentom sile ručno okretanih prekidača. U usporedbi s tradicionalnom metodom operacije, vrijeme operacije je slično. Izbjegava rizike održavajućeg osoblja koje operira takvim prekidačima blizu, bez povećanja troškova vremena, a uređaj ima dobru inženjersku primjenu.










