
Қалалық электр жүйесінің кабелдерлесуі мен жер астына ұсталуы бөлік тармалық құрылысында оңтайландыруға бағытталған қайтарылмайтын тенденция болып табылады. Жоғары напрямдагы шынымен басқаратын аппараттар, бөлік жүйесінің негізгі құрылғысы ретінде, техник қызметкерлердің күнделікті қызмет ету және қолдауының негізгі объектісі болып саналады. Құрылғылардың жаңартылу процессінде, жаңа құрылғылардың толық ауыстырылуы мен пайдалануға қоюы узақ мезгілге созылады, осылайша ескі қолмен басқаратын жоғары напрямдагы шынымен басқаратын аппараттар хизматте қалады.
Узақ мезгілге қолданылған соң, сондай құрылғылар ачу-жабу операциялары кезінде иріктер шығуына ыңғайлауы мүмкін. Нақты қызмет ету кестесінде, электр қызмет етуі жасалмайтын кезде, қызметкерлер қолмен жабу қажет болады, бұл оларды иріктер тағын апаттан туындайды. Сондықтан, құрылғыларды жаңарту кезінде қолмен қызмет етуін ортақ қауіпсіздік шешімі ретінде алмастыратын алыстап басқарылатын жабу құрылғысын әзірлеу әлі де өте маңызды.
Бұл мәселеге назар аудару арқылы, проектке қатысушы ретінде, бұл мақала ескі қолмен басқаратын автоматтың қызмет ету өзара байланысын талдау арқылы қолмен қызмет ету кезінде қауіпсіздік рискинен сақталу үшін алыстап басқарылатын жабу құрылғысын әзірлеген.
Қолмен басқаратын автоматтардың ұсықтық жабу әдісі
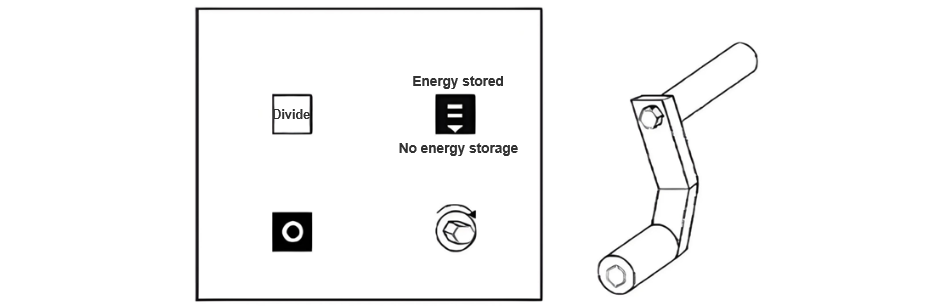
Қолмен басқаратын автоматтардың (1-суретте көрсетілген) басқару панелі және басқару күйінде, қолмен жабу айналу ұяштығы панельдің сол жағында, дұрыс алтыбұрышты профильге ие. Басқару командалық Z-формасында, төмен жағында дұрыс алтыбұрышты ұят арқылы ұяштыққа қосылатын. Қызмет ету кезінде, командалықты ұяштыққа қойғаннан кейін, жоғары жағын тікелей 24 рет айналтыру арқылы автоматты жабу амалы аяқталады.
Моментті есептеу негізі және құрылғы сызығының ұсынылған параметрлері
Басқару командалық структуралық қасиеттеріне негізделген, автоматты қолмен жабу үшін қажетті моментті күйдің ұзындығы мен тартылу күшінің параметрлері арқылы анықтауға болады. Механикалық формула бойынша

Қызмет ету өзара байланысын талдау арқылы, қолмен басқаратын автоматтың айналу қарамдылығы 15-ші айналу циклінде максимумға жетеді. Осы нүктедегі минималды моменттік мәліметтер барлық жабу процесін қамтиды. Алыстап басқарылатын жабу құрылғысының моменттік құрылымы критикалық мәннен жоғары болуы қажет, бұл арқылы әртүрлі автомат моделдерінің моменттік өзгерістеріне ыңғайлау жасалады. Толығырақ тесттік мәліметтер келесі бөліктерде көрсетілетін.
Алыстап басқарылатын жабу құрылғысының негізгі структурасы
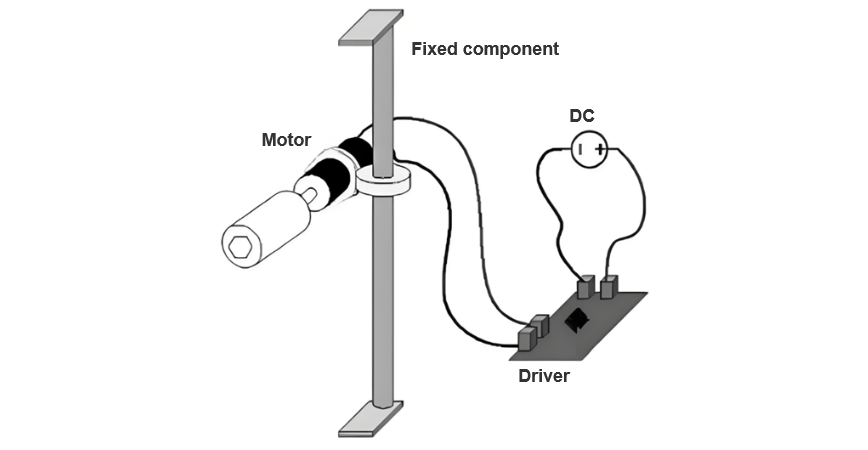
2-суретте көрсетілгендей, құрылғы ұстақ ұяштық, жылжу компоненттері, электр құрылғысы және жабу байланысынан тұрады. Ұстақ ұяштық ұзындығын өзгертуге мүмкіндік беретін, екі жағында қолдау платтары жарияланған. Орнату кезінде, ұяштық бірінші қысқартылып, вертикальді түрде шкафқа орнатылады, содан кейін ұзартылып, қолдау платтары шкафқа горизонтальді түрде қолдау қатысады. Жылжу компоненттері вертикальді түрде орналастырылып, электр құрылғысының жабу байланысының ручкалық автоматтың айналу ұяштығымен бір түзуде болуы қажет. Конфигурациядан кейін, қызметкерлер қауіпсіз аймаққа шығып, алыстап басқару передатчысы арқылы сол жағына сигнал жіберу арқылы жабу амалын аяқтауға болады.
Алыстап басқару және қызмет ету жүзеге асыру
Электр моторын таңдау және параметрлері
Негізгі мотор модулін таңдау кезінде, тұрақты магнитті DC бес щеткелі және щеткелі моторлар салыстырылды. Бес щеткелі моторлар өмір сүру мерзімі және тыю деңгейі (≤55dB) ұстанымдарында олардың өте пайдалы қасиеттерін көрсетеді, бірақ олардың басқару схемалары құралы және қымбат (щеткелі типтерге қарағанда 40% қымбат). Құрылғы үшін мотор басқаруына қатаң талаптар болмағандықтан, XD-3420 тұрақты магнитті DC щеткелі мотор таңдалды, өйткені оның басқаруы қарапайым және қымбаттығы төмен. Негізгі параметрлер:
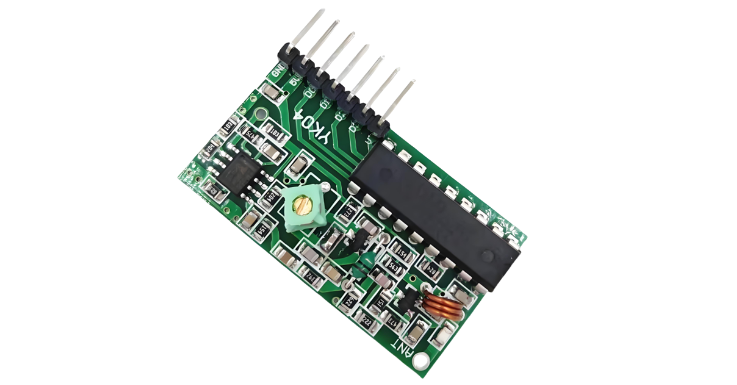
Қызметкерлер қауіпсіз қашықтықтан қызмет етуі үшін, құрылғы Qichip QA-R-010 радио алыстап басқару анонаторын қолданады. Модуль передатчик пен қабылдаушыдан тұрады: қабылдаушы 3.6V-ден 24V-ге дейінгі DC входты қолдайды, қызыл/қара телдер плюс/минус входы үшін, көк/жұмбақ телдер сәйкес выходтар үшін (выход напрям входпен сәйкес келеді). Екі батырмалы передатчик үш өріс режимін ұсынады: мезгілдік, қолданыста болу, және бірі-бірімен байланыс. Проект мезгілдік режимін қолданады, бұл батырма басылған кезде гүлденуші модулі жұмыс істейді, батырма басылмаған кезде жеңілікті алу үшін, бұл жабу амалында кезекпен басқару талаптарына сай келеді.
Жергілікті алыстап басқару эксперименті

Біз қолмен жабу үшін қажетті тартылу күшін өлшеу үшін қысым тестерін қолдандық. 1-таблицада көрсетілгендей, қолмен жабу 15-ші айналу цикліне жеткен кезде, қолмен жабу үшін қажетті минималды тартылу күші максимумға жетеді. Бұл тартылу күшіне негізделген, барлық қолмен жабу процесі үшін қажетті минималды момент 1.75 N·m деп есептелді.

Біз ұсықтық қолмен жабу әдісі мен алыстап басқарылатын жабу құрылғысының қызмет ету уақытын салыстырдым. 2-таблицада көрсетілгендей, алыстап басқарылатын жабу құрылғысын қолдану қауіптерден сақталуға өте ыңғайлауы ғана емес, чисто қолмен қызмет етуге қарағанда қызмет ету үздігін де аз өсіреді. Уақыт қызметтерін өсу безінде, қызметкерлердің қауіпсіздігі өте зият азайады.
Ағымдағы бөлік тармалықта қызметкерлердің ескі қолмен басқаратын автоматтармен жақында қызмет етуінен туындайтын қауіпсіздік рискин шешу үшін, біз қолданысқа қоюға болатын көмекші құрылғысын ұсындық және әзірдедік. Бұл құрылғы қызметкерлерге автоматтың жабуын қашықтан басқаруға мүмкіндік береді. Біз прототиптің негізгі программалық және аппараттық компоненттерін және қолдануын толығырақ сипаттадық. Моменттік тесттер алыстап басқарылатын жабу көмекші құрылғысының қолмен басқаратын автоматтардың жабу моменттік талаптарына сай келетінін көрсетеді. Ұсықтық қызмет ету әдісімен салыстырғанда, қызмет ету уақыты сияқты, бірақ қызметкерлердің жақында қызмет етуінен туындайтын қауіптерден сақталады, уақыт қызметтерін өсу безінде, құрылғы инженерлік қолданысқа өте пайдалы.










