Dizajno de malproksima fermilo por interna ŝovkara alta-volta vakuuma cirkvitorompilo

La kabladado kaj subterigado de urba elektra reto estas iĝinta neakirebla tendenco en la konstruado de distribua reto. Alta-voltaj komutiloj, kiel la kerneca equipamento de la distribua sistemo, estas iĝintaj la ĉefa objekto de ĉiutaga operacio kaj matenado por la matenadpersonaro. Dum la iterproceso de la equipamento, la tuta anstataŭigo kaj lanĉado de nova equipamento havas longan ciklon, kaj speco de malnova manovra alta-voltaja komutilo ankoraŭ estas en servado.
Pro longa operacio, tia komutilo estas prokliva al arko-rizikoj dum malfermado kaj fermaoperacioj. En praktikaj matenadscenaroj, kiam elektra operacio malsukcesas, personaro devas fari manovan fermon, kiun direktas ilin al sekurtruooj de arko. Do, evoluigi aparaton por forfermo por anstataŭigi manvan operacion kiel helpa sekura mezuro dum la ekipeca aktualigo estas urgente necesiga.
Koncentriĝante sur tiun problemon, kiel partoprenanto de projekto, ĉi tiu papero dezenas aparaton por forferma operacio per analizo de la operaciokarakteroj de malnovaj manvraj circuitbrekeroj por eviti sekurrizikojn dum manvraj operacioj.
Tradicia Ferma Metodo de Manvraj Circuitbrekeroj
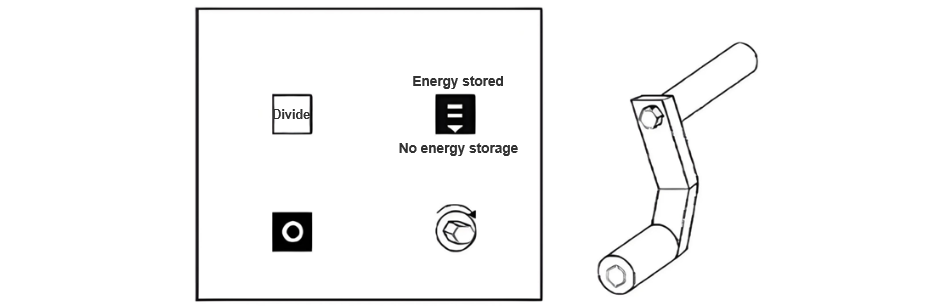
En la operaciopaneleto kaj vendostrukturo de manvraj circuitbrekeroj (kiel montrite en Figuro 1), la manva ferma turnrodo situas je la maldekstra flanko de la paneleto kun regulera sesangula sekcio. La operaciomanilo estas Z-forma, konektita al la turnrodo per regulera sesangula tubeto je la suba fino por pluggable konekto. Dum operacio, post enmeto de la manilo en la turnrodon, turnado de la supra fino horloge proksimume 24 rondojn finas la circuitbrekeron ferma agon.
Bazo de Kalkulado de Momento kaj Dezainkriteroj
Surbaze de la strukturcharacteroj de la ligada operaciomanilo, la bezono de momento por manva fermaago de la circuitbrekero povas esti derivita determinante la longon de la fortobrako kaj la tirfortparametrojn. Laŭ la mekanika formulo

Per analizo de operaciokaraktero, la rotacia rezisto de la manopezoperacianta circuitbrekero atingas sian pikegon je la 15-a rotaciclo. La minimuma momentdatumo ĉe tiu punkto povas kovri la tutan fermaagoproceson. La momentdezajno de la aparato por forfermo devas superi ĉi tiun kritikan valoron kun sekurmarĝeno por akomodi momentvariojn inter diversaj circuitbrekermodeloj. Detalaj testdatumoj estos prezentitaj en la venontaj sekcioj.
Baza Strukturo de la Aparato por Forfermo
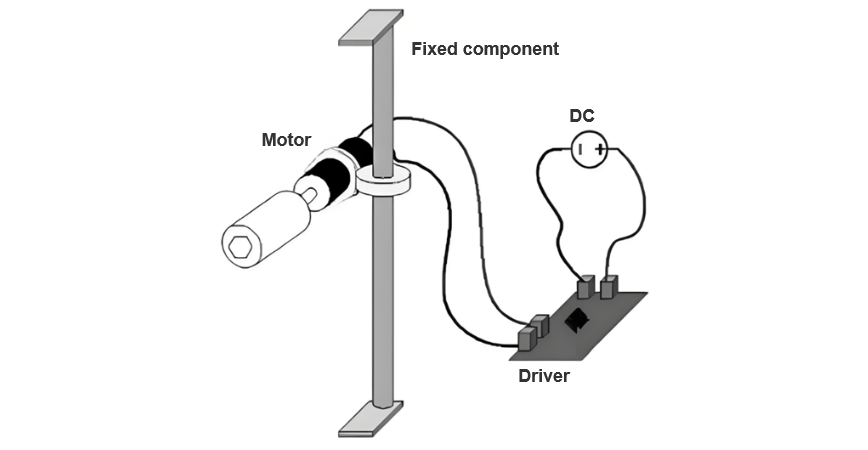
Kiel montrite en Figuro 2, la aparato konsistas el fiksrodo, movantaj komponantoj, elektra aparato, kaj ferma juntaĵo. La fiksrodo estas dezegna teleskopie, kun subtenplatoj soldataj je ambaŭ flankoj. Dum instaliĝo, la rodo unue mallongiĝas kaj vertikale metiĝas en la ŝrankon, tiam etendiĝas por ke la subtenplatoj subtenas la ŝrankon por horizontala fiksado. La movantaj komponantoj estas regolitaj vertikale por alini la ferma juntaĵon de la elekta aparato kun la turnkapo de la manvra switchkarro. Post konfigurado, operaciistoj povas retriri sin al sekura areo kaj sendi horlozan signalon per fortransmisoro por fini la ferma agon.
Realigo de Fora Kontrolo kaj Operacio
Selektado de Motoro kaj Parametroj
Pri selektado de la kerneca motoromodulo, oni komparis permanent-magnetajn senburŝajn DC motorojn kaj burŝajn motorojn. Senburŝaj motoroj oferas signifajn avantaĝojn pri vivdaŭro kaj bru-nivelo (≤55dB), sed havas kompleksajn kontrolcirkvitajn kaj pli altajn kostojn (40% pli ol burŝaj tipoj). Koncerne la aparaton ne-stringentajn bezonojn pri motorokontrolo, elektis la XD-3420 permanent-magnetan DC burŝan motoron pro sia simpla kontrolado kaj malalta kostoj. Klavaj parametroj:
Por ebligi al matenadpersonaro operaciadon de sekura distanco, la aparato uzas la Qichip QA-R-010 senfilan fortransmisoswitcon por senfila energiadministro. La modulo konsistas el transmisoro kaj ricevilo: la ricevilo subtenas DC enigon de 3.6V ĝis 24V, kun ruĝa/nigra dratoj por pozitivaj/negativaj enigoj kaj blua/griza dratoj por respondaj eligoj (la eligvoltajo korespondas al la enigvoltaĝo). La du-butantransmisoro oferas tri eligmodusojn: momentan, blokadan, kaj interligantan. La projekto uzas la momentan modon, kie la switcomodulo nur kondukas dum la butono estas premata, certigante instantan diskonexion post libereco por kontentigi la bezonojn de transesta kontrolado dum fermaoperacioj.
Eksperimento pri fora kontrolado lokte

Ni uzis tensiometron por mezuri la tirforton bezonatan por manva fermaago de eksuzita manvra handcart-switch. Kiel montrite en Tablo 1, kiam la manvra fermaago atingas ĉirkaŭ la 15-an rondon, la minimuma tirforto bezonata por manva fermaago atingas sian maksimuman valoron. Uzante ĉi tiun tirforton, ni kalkulis, ke la minimuma momento bezonata por la tuta manva fermaagoproceso estas 1.75 N·m.

Ni komparis la operaciotempo de la tradicia manva ferma metodo kaj la aparato por forfermo. Tablo 2 montras, ke uzante la aparaton por forfermo, oni ne nur evitas riskojn, sed ankaŭ leviĝas la operacieffektiveco kompare al pura manva operacio. Sen pligrandigo de tempokostoj, ĝi signife reduktas la sekurrizikojn de la operaciistoj.
Por trakti la sekurrizikon de matenadpersonaro bezonata operaciadon de malnovaj manvraj circuitbrekeroj proksime en la aktuala distribua reto, ni proponis kaj evoluigis auxilian aparaton. Ĝi permesas al matenadpersonaro teni distancon de la switchgear kaj forkontroli la circuitbrekerfermaagon. Ni detalis la bazajn softvarajn kaj hardvarajn komponentojn de la prototipo kaj ĝia uzo. Momenttestoj montras, ke ĉi tiu aparato por forfermo kontentigas la ferma-momentbezonon de manvraj circuitbrekeroj. Kompare kun la tradicia operaciometodo, la operaciotempo estas simila. Ĝi evitas la riskojn de matenadpersonaro operaciadon tiaj circuitbrekeroj proksime sen pligrandigo de tempokostoj, kaj la aparato havas bonan inĝenieran aplikvaloron.
Rekomendita










