
Postavljanje kablirnih in podzemnih električnih omrežij v mestih je postalo nevratno gibanje v gradnji distribucijskih omrežij. Visokonapetostni preklopniki, kot so glavna oprema distribucijskega sistema, so postali glavni predmet vsakodnevnega delovanja in vzdrževanja za osebje, zaposleno pri vzdrževanju. Med procesom nadomeščanja opreme ima celovito zamenjava in vklop nove opreme dolg cikel, in stari ročni visokonapetostni preklopniki so še vedno v uporabi.
Iz-za dolgoročnega delovanja je takšna oprema med operacijami odpiranja in zapiranja nagnjena k tveganju za nastajanje električnih loki. V praksi vzdrževanja, ko električni vklop ni mogoč, je potrebno ročno zapiranje, kar osebju neposredno izpostavlja varnostna tveganja zaradi električnih lok. Zato je nujno razviti napravo za oddaljeni vklop, ki bo nadomestila ročno operacijo kot pomožna varnostna merila med prehodom na novo opremo.
S središčem na to težavo ta članek kot sodelavec projekta oblikuje napravo za oddaljeni vklop, analizirajoč operacijske značilnosti starih ročnih preklopnikov, da se izogne varnostnim tveganjem med ročnimi operacijami.
Tradicionalna metoda zapiranja ročnih preklopnikov
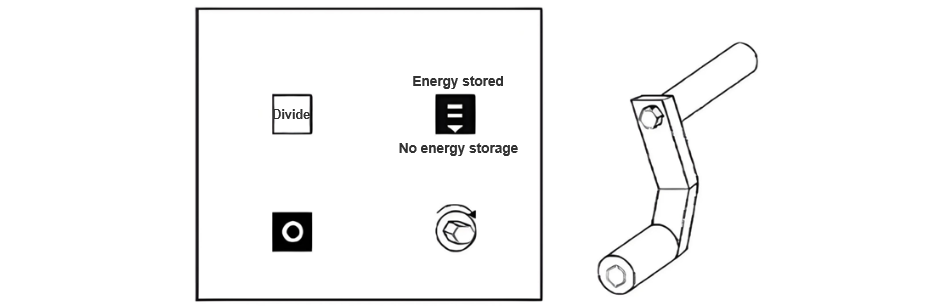
Na operacijski plošči in mehanizmu ročnih preklopnikov (kot je prikazano na Sliki 1) se nahaja ročna vrtilna palica levo od plošče z pravilno šesterokotno presečno ploskvijo. Operacijska ročica je oblike Z, spodnji konec pa je povezan s vrtilno palico preko pravilno šesterokotne cevi za vstavljanje. Pri operaciji, po vstavljanju ročice v vrtilno palico, se zgornji konec v zgodovinskem smeri obrne približno 24 obrati, da se zaključi operacija zapiranja preklopnika.
Osnova za izračun vrtljive moči in kriteriji za oblikovanje
Na osnovi strukturnih značilnosti povezovalne ročice se lahko izvede zahteva za vrtljivo moč pri ročnem zapiranju preklopnika z določitvijo dolžine ročke in parametrov povlečne sile. Po mehanski formuli

Skupaj s karakterističnimi analizami doseže operacijska odpornost ročno delujočega preklopnika svoj vrh pri 15. ciklu vrtenja. Podatki o minimalni vrtljivi moči na tem mestu lahko pokrijeta celoten postopek zapiranja. Oblikovanje vrtljive moči naprave za oddaljeni vklop mora presegati to ključno vrednost z varnostnim zamikom, da bi se prilagodilo variacijam vrtljive moči med različnimi modeli preklopnikov. Podrobni testni podatki bodo predstavljeni v naslednjih odsekih.
Osnovna struktura naprave za oddaljeni vklop
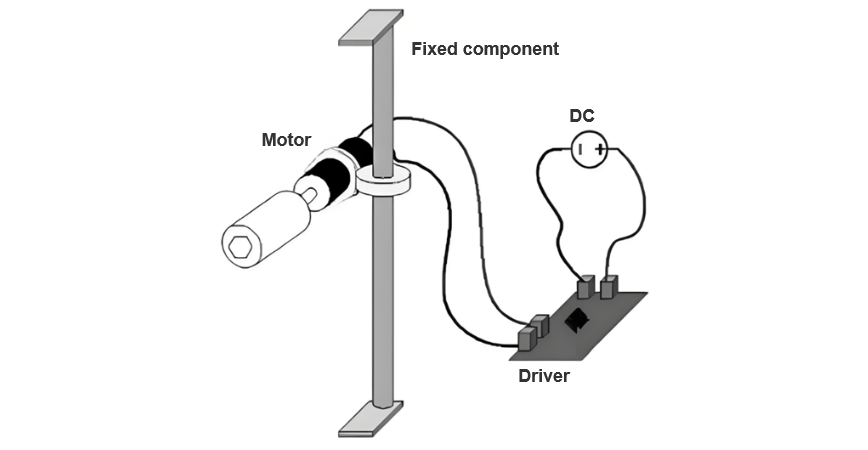
Kot je prikazano na Sliki 2, naprava sestoji iz fiksne palice, gibljivih komponent, električne naprave in spoja za zapiranje. Fiksna palica je oblikovana tako, da je teleskopična, z nosili na obeh straneh. Med namestitvijo se najprej skrči in postavi vertikalno v kabinet, nato se raztegneta, da nosili podprta proti kabinetu za horizontalno fiksacijo. Gibljive komponente se prilagodijo v vertikalni smeri, da se spoj za zapiranje električne naprave poravnata z vrtilnim glavom ročnega preklopnika. Po konfiguraciji lahko operatorji umakneta v varno območje in pošljejo signal za zgodovinski obrat preko oddaljenega prenaševalnika, da zaključita operacijo zapiranja.
Izvedba oddaljenega nadzora in delovanja
Izbira motorja in parametrov
Pri izbiri jedrskega motorja smo primerjali trajni magnetni enosmerni brezčetrtični motor in četrtični motor. Brezčetrtični motorji ponujajo značilnosti v korist življenjske dobe in raven hrupa (≤55dB), vendar imajo kompleksne nadzorne obročne plošče in višje stroške (40% več kot četrtični tipi). Z upoštevanjem nezahtevnosti naprave za nadzor motorja, je bil izbran trajni magnetni enosmerni četrtični motor XD-3420 zaradi preprostega nadzora in nizkih stroškov. Ključni parametri:
Za omogočitev osebju vzdrževanja, da deluje iz varne razdalje, uporablja naprava brezžičen oddaljeni prenaševalski preklop Qichip QA-R-010 za brezžično upravljanje z energijo. Modul sestoji iz prenaševalca in sprejemnika: sprejemnik podpira DC vhod od 3.6V do 24V, z rdeči/črnimi vodi za pozitiven/negativni vhod in modri/sivo vodi za ustrezne izhode (izhodna napetost se ujema z vhodom). Dvigalka z dvema gumbi ponuja tri načine izhoda: trenutni, zavarovalni in vezani. Projekt uporablja trenutni način, kjer preklopni modul prenaša samo, ko je gumb pritisnjen, kar zagotavlja trenutno prekinitev ob spustitvi, da bi zadostoval zahteve za trenutno kontroliranje med operacijami zapiranja.
Poskus oddaljenega nadzora na mestu

Uporabili smo napravo za merjenje povlečne sile, da bi izmerili povlečno silo, potrebno za ročno zapiranje ročnega preklopnika, ki ni več v uporabi. Kot je prikazano v Tabeli 1, ko doseže ročno zapiranje okoli 15. obrata, doseže minimalna povlečna sila, potrebna za ročno zapiranje, svojo maksimalno vrednost. S to povlečno silo smo izračunali, da je minimalna vrtljiva moč, potrebna za celoten postopek ročnega zapiranja, 1.75 N·m.

Primerjali smo čase delovanja tradicionalne metode ročnega zapiranja in naprave za oddaljeni vklop. Tabela 2 kaže, da uporaba naprave za oddaljeni vklop ne le izogiba tveganjem, ampak tudi malo izboljša učinkovitost delovanja v primerjavi z čisto ročnim delovanjem. Brez povečevanja časovnih stroškov znatno zmanjša varnostna tveganja za operatore.
Za reševanje varnostnega tveganja, da osebje vzdrževanja mora blizu delovati z stari ročni preklopniki v trenutnem distribucijskem omrežju, smo predlagali in razvili pomožno napravo. Ta omogoča osebju vzdrževanja, da ostanejo oddaljeni od preklopnika in ga oddaljeno nadzorujejo. Podrobno smo opisali osnovne programske in strojne komponente prototipa in njegovo uporabo. Testi vrtljive moči kažejo, da ta pomožna naprava za oddaljeni vklop zadostva zahtevam za vrtljivo moč ročnih preklopnikov. V primerjavi z tradicionalno metodo delovanja je čas delovanja podoben. To izogiba tveganjem, da osebje vzdrževanja deluje z takšnimi preklopniki blizu, brez povečevanja časovnih stroškov, in naprava ima dobro inženirske uporabne vrednosti.










