
Поставувањето на кабели и подземно преведување на градски електропреносни линии стана необратлив тренд во изградбата на распределителната мрежа. Високонапонските преклопачки, како главно опрема на системот за распределба, станаат главен објект на секојдневната операција и одржување за оддржувачката персонала. Во текот на процесот на итерација на опремата, целокупната замена и воведување на нова опрема има долг циклус, и еден тип старородна рачна високонапонска преклопачка сè уште е во функција.
Због долго време на работа, таквата преклопачка е склонна на ризики од дуговање при отварање и затварање. Во пракса, кога електричното управување не успее, потребно е рачно затварање од страна на персоналот, што ги става директно под бедна од дуговање. Затоа, развојот на уред за оддалечено затварање за замена на рачното управување како помошна безбедносна мерка во текот на транзицијата на ажурирање на опремата е најавен.
Фокусирајќи се на овој проблем, како учесник во проектот, овој труд дизајнира уред за оддалечено управување со затварање, анализирајќи карактеристиките на работата на старите рачни преклопачки за избегнување на безбедносни ризици во текот на рачните операции.
Традиционален метод за затварање на рачни преклопачки
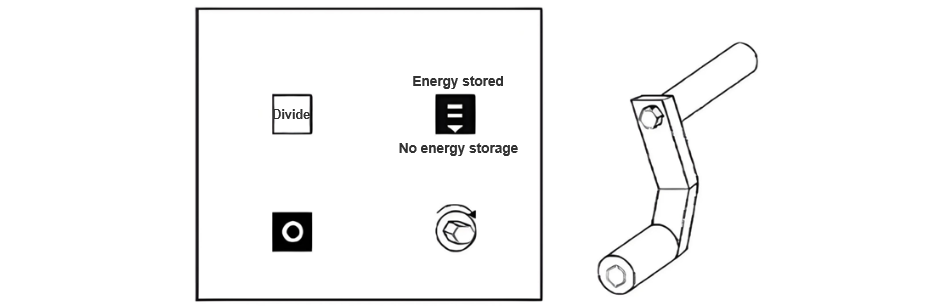
Во панелот за управување и структурата на крушка на рачните преклопачки (како што е прикажано на Слика 1), ротационата крушка за рачно затварање е поставена на левата страна на панелот со правилна шестаголема пресечна површина. Ручката за управување е Z-образна, поврзана со крушката за враќање преку правилна шестаголема муфта на долниот кraj за поврзување со плагање. Токму во текот на операцијата, следејќи вметнувањето на ручката во крушката, завртувањето на горниот кraj по часовниковата стрелка околу 24 кругови ја завршува акцијата за затварање на преклопачката.
Основа за пресметка на моментот и критериуми за дизајн
На основа на структурните карактеристики на врскачката ручка за управување, барањето за момент за рачно затварање на преклопачката може да се изведе со определување на должината на ракавот за сила и параметрите за повлекување. Според механичкиот формула

Според анализа на карактеристиките на работата, ротациониот отпор на рачно управуваната преклопачка достигнува својот врв во 15тиот циклус на ротација. Минималните податоци за момент на тој момент можат да покријат целата процес на затварање. Дизајнот на моментот на уредот за оддалечено затварање мора да надмине оваа критична вредност со маргина за безбедност за да се приспособи на варијациите на моментот меѓу различните модели на преклопачки. Подробни тест податоци ќе бидат прикажани во последните делови.
Основна структура на уредот за оддалечено затварање
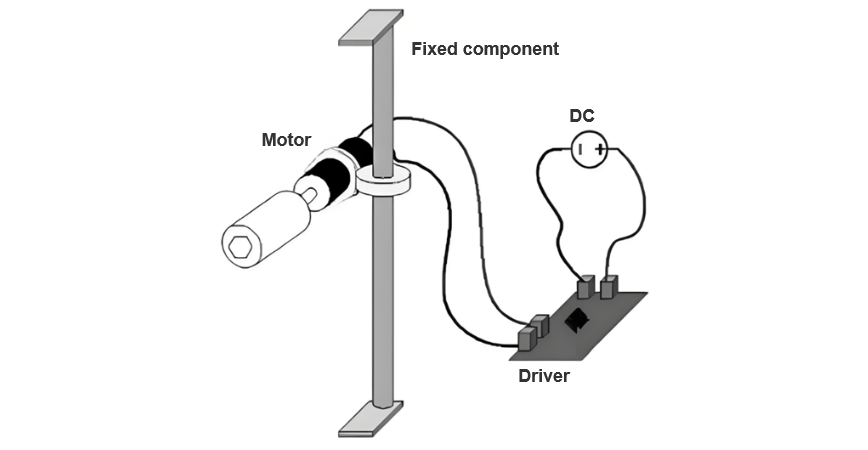
Како што е прикажано на Слика 2, уредот се состои од фиксна крушка, движечки компоненти, електричен уред и спојна за затварање. Фиксната крушка е дизајнирана да биде телескопска, со опорни плочи сварени на двете страни. Во текот на инсталацијата, крушката прво се скрати и се постави вертикално во кабинетот, потоа се прошири за да направи опорните плочи да се подголемат против кабинетот за хоризонтално фиксирање. Движечките компоненти се регулираат во вертикална насока за порамнување на спојната за затварање на електричниот уред со ротацијата на главата на количката. Потоа, операторите можат да се повлечат во безбедна област и да испратат сигнал по часовниковата стрелка преку оддалечен префрмитер за завршување на акцијата за затварање.
Реализација на оддалечено управување и работа
Избор и параметри на моторот
При изборот на главниот модул на моторот, се споредуваа постоянни магнетни DC безчешчи мотори и мотори со чешчи. Безчешчите мотори нудат значајни предности во живот на служба и ниво на шум (≤55dB), но имаат комплексни контролни кружници и повисоки трошоци (40% повеќе од типовите со чешчи). Затоа што уредот нема строги барања за контрола на моторот, беше избран XD-3420 постоянен магнетен DC мотор со чешчи поради неговата проста контрола и ниски трошоци. Клучни параметри:
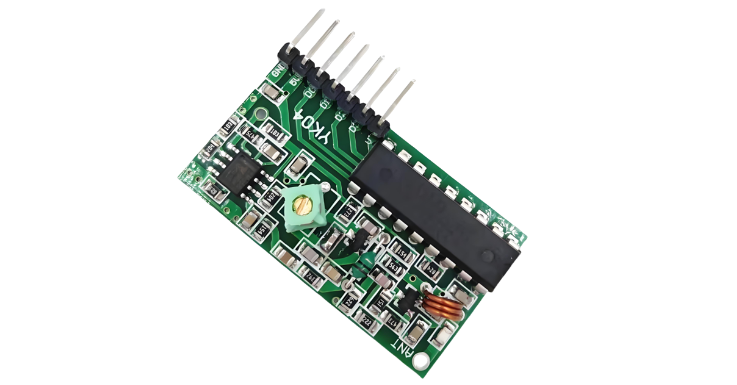
За да овозможи на оддржувачката персонала да работи од безбедно растојание, уредот користи Qichip QA-R-010 безжичен префрмитер за управување со моќ. Модулот се состои од праќач и примиач: примиачот поддржува DC вход од 3.6V до 24V, со црвени/црни жици за позитивни/негативни входи и синьо/сиви жици за соодветни излези (напонот на излезот се совпаѓа со влезот). Двокопчетниот праќач нуди три режими на излез: моментален, застанување и заедничко. Проектот го користи моменталниот режим, каде што модулот за префрмитер проводи само додека се притисне копчето, што гарантира моментално прекинување при отпускнување за да задоволи барањата за преходно контрола во текот на операцијата за затварање.
Експеримент на оддалечено управување на местото

Користевме тензометар за мерење на силата потребна за рачно затварање на декомисионирани рачни преклопачки. Како што е прикажано во Табела 1, кога рачното затварање достигнува околу 15тиот круг, минималната сила потребна за рачно затварање достигнува максималната вредност. Користејќи ја оваа сила, пресметавме дека минималниот момент потребен за целата процес на рачно затварање е 1.75 N·m.

Ги споредивме времената на работа на традиционалниот метод на рачно затварање и уредот за оддалечено затварање. Табела 2 прикажува дека користејќи го уредот за оддалечено затварање, не само се избегнуваат ризици, туку се слегка подобрува ефикасноста на работата во споредба со чисто рачна работа. Без зголемување на временски трошоци, значајно се намалуваат безбедносните ризици за операторите.
За да се справиме со безбедносниот ризик на оддржувачката персонала да работи со старородни рачни преклопачки од близина во текот на моменталната распределителна мрежа, предложивме и развијме помошен уред. Тој овозможува на оддржувачката персонала да се оддалечи од преклопачката и да ја контролира преклопачката на оддалечено. Подетално ги опишавме основните софтверски и хардверски компоненти на прототипот и неговата употреба. Тестовите на моментот покажаа дека овој помошен уред за оддалечено затварање ги задоволува барањата за момент на затварање на рачните преклопачки. Споредно со традиционалниот метод на работа, временото на работа е слично. Избегнува се ризикот на оддржувачката персонала да работи со такви преклопачки од близина без зголемување на временски трошоци, и уредот има добар инженерски применителен вредност.










