
Shahar qurilishida elektr tarmoqlarini kablolar va yerkacha joylashtirish orqali ishlab chiqarish bo'lgan nazorat tarmog'ining ortiqcha yo'nalishi haqiqiy deb hisoblanadi. Yuqori voltajli qatochi, taqsimot tizimining asosiy jihozlari, sovrindorlik xodimlari uchun kundalik ish va tekshiruv asosiy obyekti bo'lib qolmoqda. Jihozlar yangilanish jarayonida, yangi jihozlar bilan to'liq almashtirish va ularning ishga tushirilishi uzun muddat davom etadi, shuning uchun qo'l bilan o'tkaziladigan yuqori voltajli qatochi hali ham ishda.
Uzoq muddat ishlatilgan natijasida, bunday qatochilarda ochish va yopish jarayonlari paytida ark yaratish ehtimoli yetakchi bo'lishi mumkin. Amaliy tekshiruv jarayonlari paytida, elektr energiyasi yordamida ishlash muvaffaqiyatsiz bo'lganda, shaxsiylar tomonidan qo'l bilan yopish talab etiladi, bu esa ularni arkdagi xavflardan ota-ona qilib qo'yadi. Shuning uchun, jihozlar yangilanish jarayonida qo'l bilan bajariladigan operatsiyani almashtirish uchun masofadan yopish qurilmasini rivojlantirish zarur bo'lib qoldi.
Bu muammoga qaratib, loyiha ishtirokchisi sifatida, bu maqola eskirgan qo'l bilan o'tkaziladigan avtomatlarni ish rejasini tahlil qilib, qo'l bilan bajariladigan operatsiyalar paytida xavf-xatarlardan saqlanish uchun masofadan yopish qurilmasini dizayn qiladi.
Qo'l bilan o'tkaziladigan avtomatlarning aniq yopish usuli
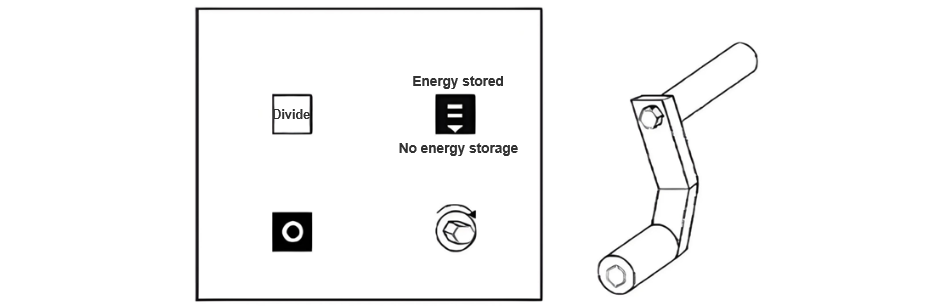
Qo'l bilan o'tkaziladigan avtomatlarning paneli va burilish strukturasida (Rasm 1-kunga ko'ra), qo'l bilan yopish uchun mo'vilanadigan qutqa panelning chap tomonida joylashtirilgan, uning kesit-shakli adolatli oltiburchak bo'lib, ish rejasi Z-shaped, pastki qismida adolatli oltiburchak quti orqali ulangan, qo'shilish uchun. Ish rejasi paytida, quti mo'vilanadigan qutiga joylashtiriladi, keyin uni tepasidan teshik ravishda 24 marta aylanitish orqali avtomat yopiladi.
Torque hisoblash asoslari va dizayn standartlari
Ish rejasi strukturaviy xususiyatlari asosida, avtomatni qo'l bilan yopish uchun torque talabi, kuch qo'llaniladigan nuqtaga borib to'g'ri keladigan balandlik va tortishish parametrlarini aniqlash orqali olinadi. Mexanika formulasi asosida

Ish rejasi xususiyatlari tahlili orqali, qo'l bilan ishlatiladigan avtomatning aylanish qarshilik shoshili 15-marta aylanish tsikli paytida maksimal bo'lib o'tadi. Bu paytdagi minimal torque ma'lumotlari butun yopish jarayonini qamrab oladi. Masofadan yopish qurilmasi dizaynida, bu kritik qiymatdan xavfsizlik marjini o'tkazib yuborish zarur, chunki turli avtomat modellari o'rtasidagi torque o'zgarishlarini qondirish kerak. Aniq test ma'lumotlari keyingi bo'limlarda keltiriladi.
Masofadan yopish qurilmasining asosiy struktura
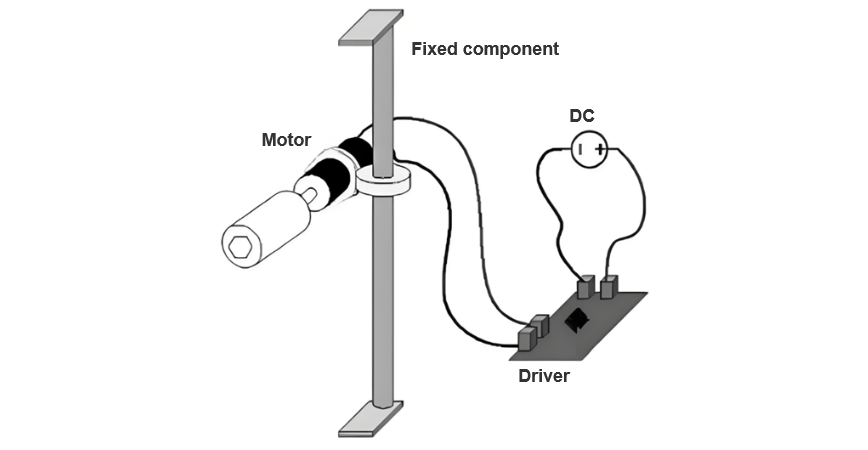
Rasm 2-da ko'rsatilganidek, qurilma sabit quti, harakat qiluvchi komponentlar, elektr qurilmalar va yopish ulashishdan iborat. Sabit quti siqiladigan qilinishi kerak, ikki tomondagi qo'llab quvvatlash plitalari qatorga qo'yilgan. O'rnatish paytida, oldin quti qisqartiriladi va vertikal ravishda shkafga joylashtiriladi, keyin qo'llab quvvatlash plitalari shkafga horizontaldan qo'llab quvvatlaydi. Harakat qiluvchi komponentlar vertikal ravishda moslashtiriladi, elektr qurilmasining yopish ulagichi qo'l bilan o'tkaziladigan avtomatning aylanish qutisiga moslashtiriladi. Sozlashdan so'ng, operatorlar xavfsiz maydonka qaytab ketishlari mumkin va masofadan egalovchi orqali sa'nat ravishda signal yuborish orqali yopish amalini yakunlaydilar.
Masofadan boshqarish va ish rejasi
Motor tanlovi va parametrlari
Asosiy motor modulini tanlashda, doimiy magnitli DC brushsiz motora va brushli motoralar solishtirildi. Brushsiz motoralar xizmat muddati va sarovshin darajasi (≤55dB) bo'lganida omillik afzallikka ega, ammo kompleks boshqarish shemalariga va yuqori narxlarga (brushli turdan 40% yuqori) ega. Qurilmaning motor boshqarishiga nisbatan kam talablarini hisobga olgan holda, XD-3420 doimiy magnitli DC brushli motora, sodda boshqarish va arzon narxi sababli tanlandi. Asosiy parametrlar:
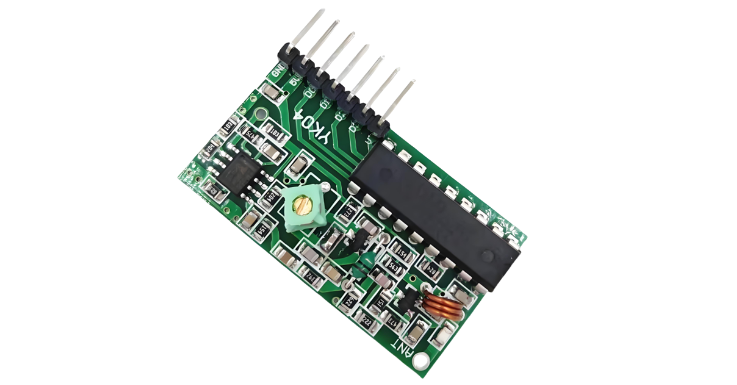
Soxrindorlik xodimlarini xavfsiz masofadan ishlash imkoniyatini berish uchun, qurilma Qichip QA-R-010 radiyo egalovchi kalitini ishlatadi. Modul egalovchi va qabul qiluvchidan iborat: qabul qiluvchi 3.6V dan 24V gacha DC kirishni qo'llab quvataydi, qizil/qora provodlar musbat/ming o'quvchilari uchun, ko'k/bo'ri provodlar mos keluvchi chiqish uchun (chiqish voltaj kirishga mos keladi). Ikki tugmali egalovchi uchta chiqish rejimini taklif etadi: momentli, sabit va bir-biriga bog'liq. Loyiha momentli rejimidan foydalanadi, bu erda modul faqat tugma bosilayotgan payt ishlaydi, bu esa yopish jarayonida vorislikni bekor qilish talablarini qondiradi.
Maydoniy masofadan boshqarish tajribasi

Biz qo'l bilan o'tkaziladigan eski avtomatni yopish uchun talab etiladigan tortishish kuchini o'lashing uchun teslamalik qurilmani ishlatdik. Jadvallar 1-da ko'rsatilgidek, qo'l bilan yopish 15-marta aylanishga yetkazilganda, qo'l bilan yopish uchun talab etiladigan minimal tortishish kuchi maksimal qiymatga erishadi. Ushbu tortishish kuchi orqali, biz qo'l bilan yopish jarayonining butun jarayonida talab etiladigan minimal torque 1.75 N·m bo'lishini hisoblaganmiz.

Biz aniq yopish usuli va masofadan yopish qurilmasi orqali amalga oshiriladigan ish rejasi vaqtini solishtirdik. Jadvollarda 2-da ko'rsatilgidek, masofadan yopish qurilmasidan foydalanish xavf-xatarlarni oldini olishga, hamda saf qo'l bilan bajariladigan ish rejasi paytida nisbiy ravishda samaraliroq ish rejasi vaqtini ta'minlaydi. Vaqt xarajatlarini oshirmay, bu qurilma soxrindorlik xodimlari uchun xavf-xatarlarni nihoyatda pasaytiradi.
Joriy taqsimot tarmog'ida, eskirgan qo'l bilan o'tkaziladigan avtomatlarni yaqin masofadan ishlatish xavf-xatarini hal qilish uchun, biz yordamchi qurilmani taklif etish va rivojlantirdik. Bu qurilma soxrindorlik xodimlariga avtomatdan masofada qolish va uning yopishini masofadan boshqarish imkoniyatini beradi. Biz prototipning asosiy programmnalik va apparatli komponentlarini, shuningdek, uning ishlatilishini tafsilotli tavsifladik. Torque testlari ko'rsatayotki, bu masofadan yopish yordamchi qurilmasi qo'l bilan o'tkaziladigan avtomatlarni yopish uchun torque talablariga javob beradi. Aniq ish rejasi usullari bilan solishtirganda, ish rejasi vaqti o'xshash, lekin bu qurilma soxrindorlik xodimlari uchun xavf-xatarlarni yaqin masofadan ishlatishdan oldin, vaqt xarajatlarini oshirmay, xavf-xatarlarni nihoyatda pasaytiradi, va qurilma juda yaxshi inshoot ishlatish qiymatiga ega.










