
Linnapiirkondade elektrivõrgude johtmete ja maapinna all asetamise trend on saanud jaotusvõrgu ehitamises pöördumatuteks. Kõrgepingelised lülited, mis on jaotussüsteemi keskne varustus, on muutunud hooldusmeeskondade igapäevaseks tööks. Varustuse värskendamisel on täieliku vahetamise ja uue varustuse sissepanekuga seotud pikem tsükkel ning vanad kätejuhitud kõrgepingelised lülited on veel kasutuses.
Pikaajalise kasutamise tõttu sellised lülitid on avamisel ja sulgemisel alati ohtlikest plaksudest. Praktikas, kui elektriline juhtimine ebaõnnestub, on vaja lüliti kätega sulgeda, mis väljastab hooldusmeeskonda ohtlikule plaksuriskile. Seega on kiireloomuline arendada kaugjuhitav sulgemislaadimine, mis asendaks kätejuhitava sulgemise üleminekul uuele varustusele.
Selle küsimusega tegelev dokument, kui projektiosaleja, disainib kaugjuhitava sulgemislaadimise analüüsides vanade kätejuhitavate lülitete töötamisomadusi, et vältida turvariske kätejuhitaval toimingul.
Vanade kätejuhitavate lülitete traditsiooniline sulgemismeetod
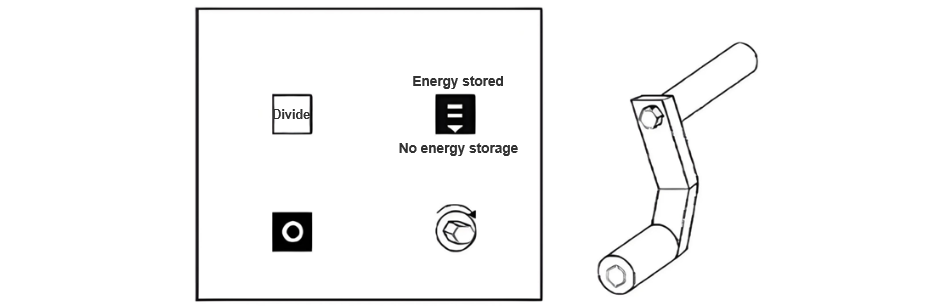
Kätejuhitavate lülitete (näidatud Joonis 1) operatsioonipaneelil ja kätekraanil on sulgemiseks mõeldud kätekraan paneeli vasakul pool, mille ristlõige on säästev kuusnurk. Operatsioonihang on Z-kujuline, mille alumine osa on kätekraaniga ühendatud säästeva kuusnurga kaudu ühendamiseks. Sulgemiseks peab kätekraani pöörama vastupäikse suunas umbes 24 ringi.
Momenti arvutuse alused ja disainikriteeriumid
Operatsioonihangete struktuuriomaduste põhjal saab kätejuhitava lülitite sulgemiseks vajaliku momenti määrata, määrates jõuhaaraga ja venitamisparameetrite pikkuse. Mõjutamise mehaanilise valemi järgi

Töödelda omaduste analüüsi abil, kätejuhitava lülitite pöörlemise vastus saavutab oma maksimumi 15. ringi ajal. Selle hetke vähima momentandmeid võib kasutada kogu sulgemisprotsessi hõlmamiseks. Kaugjuhitava sulgemislaadimise disainimoment peab ületama selle kriitilise väärtuse ohutuse margega, et katta erinevate lülititemudeleide momentimuutused. Täpsemad testandmed esitatakse järgmistes osades.
Kaugjuhitava sulgemislaadimise põhiline struktuur
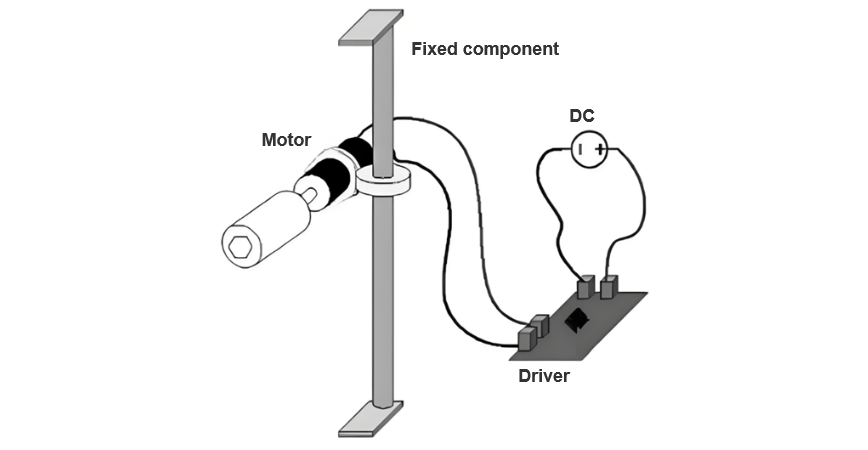
Nagu näidatud Joonis 2, koosneb seade kohandatavast tiibist, liiguvatest komponentidest, elektrilisest seadmesest ja sulgemise ühendustikust. Kohandatav tiib on disainitud venitamiseks, millel on mõlemal pool toetatud plaadid. Paigaldamisel lühendatakse tiibi, pannakse see vertikaalselt kasti, laiendatakse seejärel horisontaalselt kasti toetamiseks. Liiguvad komponendid korrastatakse vertikaalselt, et elektrilise seadme sulgemise ühendustik oleks vastavuses kätekraani pöördeluga. Konfigureerimise järel võivad operaatorid taganeda ohutuspiirini ja saatma kaugjuhitava signaali, et lõpetada sulgemisoperatsioon.
Kaugjuhituse ja operatsiooni realiseerimine
Mootori valik ja parameetrid
Tugeva mootorimooduli valimisel võrreldi permanentmagneetset DC sügavpuudutamiseta mootorit ja puudutamisega mootorit. Sügavpuudutamiseta mootorid pakuvad olulist eelist elueelsuses ja müra tasemel (≤55dB), kuid nende juhtimiskivid on keerukad ja kulukad (40% kallimad kui puudutamisega mootorid). Arvestades seadme mittestringentset nõuet moatori juhtimiseks, valiti XD-3420 permanentmagneetne DC puudutamisega moator lihtsa juhtimise ja madala hinnaga. Olulised parameetrid:
Et võimaldada hooldusmeeskonnal tegutseda ohutuskaugusel, kasutab seade Qichip QA-R-010 langemat laadi juhtimiseks. Moodul koosneb edastajast ja vastuvõtjast: vastuvõtja toetab DC sisendit 3.6V kuni 24V, punased/mustad juhed on positiivne/negatiivne sisend ja sinised/hallad juhed vastavad väljundile (väljundpinge vastab sisendi). Kaks-nuppeline edastaja pakub kolme väljundirežiimi: ajutine, lukitus ja ühendamine. Projekt kasutab ajutist režiimi, kus sulgemismoodul läbib ainult nuppu vajutamisel, tagades vabaenergia väljakustutamise vabastamisel, et rahuldada lühiajaliste kontrollide nõuded sulgemisoperatsioonidel.
Kohtuks kaugjuhituse eksperiment

Me kasutasime venitamise testimist, et mõõta kätejuhitava sulgemiseks vajalikku venitamisjõudu vanal kätejuhitaval kätekraanil. Näidatud tabel 1, kui kätejuhitav sulgemine jõuab umbes 15. ringini, siis vajalik minimaalne venitamisjõud jõuab oma maksimumväärtuseni. Selle venitamisjõu abil arvutasime, et kogu kätejuhitava sulgemisprotsessi jaoks vajalik minimaalne moment on 1.75 N·m.

Me võrdlesime traditsioonilise kätejuhitava sulgemismeetodi ja kaugjuhitava sulgemislaadimise operatsiooniaega. Tabel 2 näitab, et kaugjuhitava sulgemislaadimise kasutamine ei välti riski, vaid suurendab ka operatsioonitõhusust võrreldes puhtalt kätejuhitava sulgemisega. Aegade lisamiseta vähendab see oluliselt operaatorite turvariske.
Olemasoleva jaotusvõrgu seisundis, kus hooldusmeeskonna liikmed peavad kätejuhitavaid lülitite sulgema, esitasime ja arendasime abilaadimise. See võimaldab hooldusmeeskonnal hoiduda lülititest kaugel ja juhtida lülitite sulgemist kaugelt. Me kirjeldasime prototüübi põhiline ohjalamis- ja rakenduskomponente ja nende kasutamist. Momentitestid näitavad, et see kaugjuhitav sulgemisabilaadimine rahuldab kätejuhitavate lülitite sulgemise momentinõudeid. Võrreldes traditsioonilise meetodiga, on operatsiooniaeg sarnane. See vältib hooldusmeeskonna liikmete lähedast operatsioonit riskidega ilma aega suurendamata, ja seade omab hea insenerilise rakendusväärtuse.










