
Zavedení kabelů a zavedení elektrické sítě do podzemí se stalo neodvrátitelnou tendencí v konstrukci distribučních sítí. Vysokonapěťová spínací zařízení, jakožto jádrové vybavení distribučního systému, se stala hlavním objektem každodenního provozu a údržby pro personál údržby. Během procesu iterace zařízení má komplexní výměna a nasazení nového zařízení dlouhou dobu trvání a starý ručně ovládaný vysokonapěťový příhradový rozvod je stále v provozu.
V důsledku dlouhodobého provozu je toto spínací zařízení náchylné k riziku vzniku oblouku během operací otevírání a zavírání. V praxi údržby, kdy selže elektrická operace, je požadováno ruční zavírání personálem, což je přímo vystavuje bezpečnostní hrozbám způsobeným obloukem. Proto je naléhavé vyvinout zařízení pro dálkové zavírání, které by nahradilo ruční operaci jako pomocnou bezpečnostní opatření během přechodu na nové vybavení.
Tento článek, jako součást projektu, navrhuje zařízení pro dálkové zavírání tím, že analyzuje provozní charakteristiky starých ručně ovládaných příhradových vypínačů, aby se zabránilo bezpečnostním rizikům během ručních operací.
Tradiční metoda zavírání ručně ovládaných příhradových vypínačů
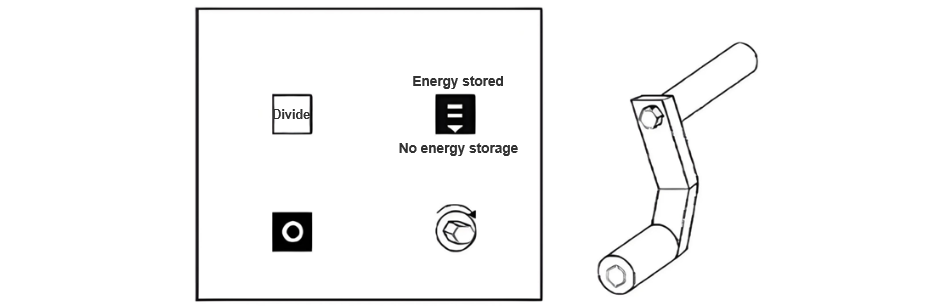
V operačním panelu a mechanismu otáčení ručně ovládaných příhradových vypínačů (viz obrázek 1) se ručně ovládaná otáčivá tyč nachází na levé straně panelu s pravidelným šestiúhelníkovým průřezem. Operační rukojeť má tvar písmene Z a spojuje se s otáčivou tyčí prostřednictvím šestiúhelníkového pouzdra na spodním konci pro zapojení. Během operace, poté, co se rukojeť vsunula do otáčivé tyče, se otočením horního konce zhruba 24 kruhy ve směru hodinových ručiček dokončí akce zavírání vypínače.
Báze pro výpočet točivého momentu a návrh kritérií
Na základě konstrukčních charakteristik spojovací rukojeti lze odvodit požadavek na točivý moment pro ruční zavírání vypínače určením délky ramena síly a parametrů tahové síly. Podle mechanického vzorce

Analýzou provozních charakteristik bylo zjištěno, že odpor k otáčení ručně ovládaného vypínače dosahuje svého vrcholu při 15. cyklu otáčení. Minimální data točivého momentu v tomto bodě pokrývají celý proces zavírání. Návrh točivého momentu zařízení pro dálkové zavírání musí překročit tento klíčový hodnotu s bezpečnostní rezervou, aby se zabránilo variacím točivého momentu mezi různými modely vypínačů. Podrobná testovací data budou prezentována v následujících částech.
Základní struktura zařízení pro dálkové zavírání
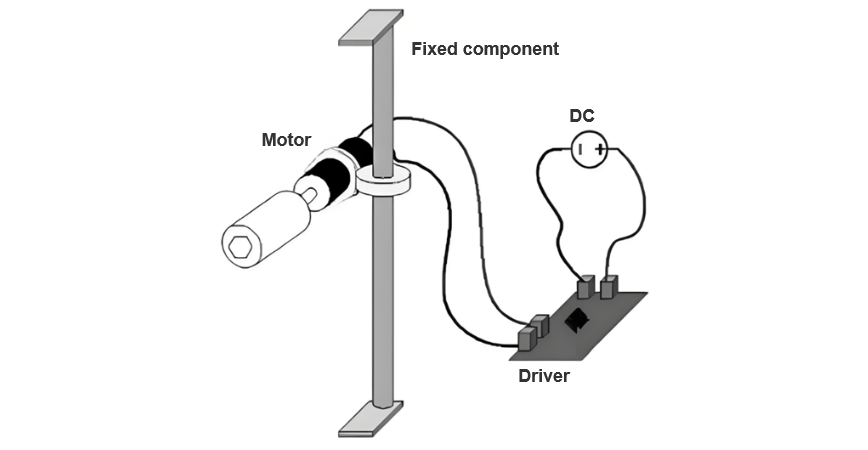
Jak je znázorněno na obrázku 2, zařízení se skládá ze statické tyče, pohyblivých komponent, elektrického zařízení a uzávěrového spoje. Statická tyč je navržena jako teleskopická s nosnými deskami svařenými na obou stranách. Během instalace se tyč nejdříve zkrátí a umístí svisle do skříně, pak se prodlouží tak, aby nosné desky opřely o skříň pro horizontální fixaci. Pohyblivé komponenty jsou upraveny v svislém směru tak, aby uzávěrový spoj elektrického zařízení byl zarovnán s otáčivou hlavou ručně ovládaného vypínače. Po nastavení mohou operátoři ustoupit do bezpečné oblasti a poslat signál ve směru hodinových ručiček prostřednictvím dálkového přijímače, aby dokončili operaci zavírání.
Realizace dálkového řízení a operace
Výběr motoru a parametry
Při výběru jádrového modulu motoru byly porovnány permanentní magnety DC bezštětivé motory a štětivé motory. Bezštětivé motory nabízejí významné výhody v životnosti a hladině hluku (≤55dB), ale mají složité řídící obvody a vyšší náklady (40 % více než štětivé typy). S ohledem na nevelké požadavky zařízení na řízení motoru byl vybrán permanentní magnet DC štětivý motor XD-3420 kvůli jednoduchému řízení a nízkým nákladům. Klíčové parametry:
Pro umožnění provozu personálu údržby z bezpečné vzdálenosti zařízení využívá bezdrátový dálkový přepínač Qichip QA-R-010 pro bezdrátové správu energie. Modul se skládá z vysílače a přijímače: přijímač podporuje stejnosměrné napájení od 3.6V do 24V, s červenými/černými dráty pro kladné/záporné vstupy a modré/sivé dráty pro odpovídající výstupy (výstupní napětí odpovídá vstupnímu). Dvoutlačítkový vysílač nabízí tři režimy výstupu: krátkodobý, zajišťovací a interlock. Projekt využívá krátkodobý režim, kde modul přepínání provede pouze tehdy, když je tlačítko stisknuté, což zajišťuje okamžité odpojení po uvolnění, aby splnilo požadavky na dočasné řízení během operací zavírání.
Polevní experiment s dálkovým řízením

Použili jsme dynamometr k měření síly potřebné k ručnímu zavírání vyřazeného ručně ovládaného vypínače. Jak je znázorněno v tabulce 1, když ruční zavírání dosáhne přibližně 15. kola, minimální síla potřebná k ručnímu zavírání dosáhne své maximální hodnoty. Pomocí této síly jsme vypočítali, že minimální točivý moment potřebný pro celý proces ručního zavírání je 1.75 N·m.

Porovnali jsme doby provozu tradiční metody ručního zavírání a zařízení pro dálkové zavírání. Tabulka 2 ukazuje, že použití zařízení pro dálkové zavírání nejen eliminuje rizika, ale také mírně zlepšuje efektivitu provozu v porovnání s čistě ručním provozem. Bez zvyšování časových nákladů toto zařízení výrazně snižuje bezpečnostní rizika pro operátory.
Abychom řešili bezpečnostní riziko, kdy personál údržby musí pracovat s blízkosti staromódních ručně ovládaných vypínačů v aktuální distribuční síti, navrhli a vyvinuli jsme pomocné zařízení. Toto zařízení umožňuje personálu údržby udržovat vzdálenost od vypínače a dálkově ovládat zavírání vypínače. Detailně jsme popsali základní software a hardware prototypu a jeho použití. Testy točivého momentu ukazují, že toto pomocné zařízení pro dálkové zavírání splňuje požadavky na točivý moment pro ručně ovládané vypínače. V porovnání s tradiční metodou operace je doba provozu podobná. To eliminuje rizika pro personál údržby pracující s těmito vypínači z blízkosti, aniž by se zvyšovaly časové náklady, a zařízení má dobrý inženýrský aplikativní potenciál.










