
Из-за высокого спроса на миниатюризацию в твердотельных кольцевых распределительных устройствах (RMU), традиционные однофазные постоянномагнитные механизмы с трехфазной блокировкой не могут удовлетворить общим требованиям к миниатюризации оборудования. Поэтому разработанный в данном контексте постоянномагнитный механизм использует трехфазную независимую прямодействующую структуру. Каждая фазная камера гашения дуги интегрирована с корпусом RMU и соединена с постоянномагнитным механизмом через изолирующую штангу в линейной конфигурации. Противодействующая пружина открытия расположена на валу каждого фазного постоянномагнитного механизма. Общая структура одного прямодействующего постоянномагнитного механизма показана на рисунке 1, а его схема сборки в твердотельном RMU представлена на рисунке 2.


2. Математическая модель цепи управления постоянномагнитным механизмом
Разработанный прямодействующий постоянномагнитный механизм основан на принципе одноустойчивого состояния. Он использует метод управления, при котором заряженный конденсатор разряжается для активации постоянномагнитного механизма. Схема цепи показана на рисунке 3, где C обозначает конденсатор, используемый для управления постоянномагнитным механизмом, R — эквивалентное сопротивление катушки постоянномагнитного механизма, а L — эквивалентная индуктивность катушки.

Динамические характеристики одноустойчивого постоянномагнитного механизма удовлетворяют системе дифференциальных уравнений, представленной в уравнении (1):

где i — ток открытия или закрытия через катушку (А); uC — начальное напряжение заряженного конденсатора (В); R — эквивалентное сопротивление катушки (Ом); C — емкость заряженного конденсатора (Ф); ψ — общее магнитное сцепление электромагнитной системы (Вб); m — эквивалентная масса подвижных частей, относящихся к движущемуся сердечнику (кг); x — смещение движущегося сердечника (м); v — скорость движущегося сердечника (м/с); Fx — электромагнитная сила, действующая на движущийся сердечник (Н); Ff — противодействующая сила на движущийся сердечник (Н). Решение этой системы уравнений дает динамические характеристики постоянномагнитного механизма.

3. Эквивалентность противодействующих сил
Основные противодействующие силы в выключателе кольцевого распределительного устройства включают контактное давление камеры гашения дуги и силу пружины открытия постоянномагнитного механизма. Эти противодействующие силы эквивалентно передаются на движущийся сердечник постоянномагнитного механизма. У камеры гашения дуги расстояние между контактами составляет 9,5 мм, а перехлест — 2,5 мм, с общей ходовой характеристикой механизма 12 мм. Силы пружины открытия и контактной пружины измеряются в соответствии с ходом движения постоянномагнитного механизма, и построена кривая противодействующих сил на основе конкретных данных. Детальные точки эквивалентности противодействующих сил показаны в таблице 1.

4. Создание модели для имитационного моделирования
Динамические характеристики прямодействующего постоянномагнитного механизма решаются с использованием метода конечных элементов (FEM). Основной принцип FEM заключается в дискретизации непрерывной области решения на конечное количество элементов, соединенных в узлах. После анализа отдельных элементов выполняется глобальная сборка, применяются граничные условия, и окончательное решение получается с помощью компьютерных вычислений. В данном исследовании используется программное обеспечение для имитационного моделирования Ansoft для создания модели постоянномагнитного механизма, и задаются параметры материалов его компонентов. Материал постоянного магнита определен как NdFe35, а материал ярма — как сталь-1010.
Затем задаются параметры катушки: напряжение заряда конденсатора составляет 110 В, емкость — 0,047 Ф, постоянное сопротивление катушки — 5 Ом, число витков — 500, индуктивность — 0,0143 Гн. Поскольку прямодействующий постоянномагнитный механизм является одноустойчивым, операция открытия осуществляется за счет силы пружины открытия. Поэтому для создания обратного магнитного потока, который аннулирует поток, создаваемый постоянным магнитом, и позволяет механизму открыться под действием силы пружины, требуется только небольшой обратный ток. Чтобы уменьшить необходимый обратный магнитный поток, после многочисленных имитационных тестов в цепь управления открытием добавлен последовательный резистор сопротивлением 5 Ом.
Наконец, выполняется поверхостное и объемное моделирование и сеточное разбиение постоянномагнитного механизма. На ключевые магнитные компоненты, такие как движущийся сердечник, магнитные крышки, ярмо и постоянный магнит, применяется более плотная сетка, тогда как для немагнитных частей используется более грубая сетка.
5. Анализ результатов имитационного моделирования и экспериментов
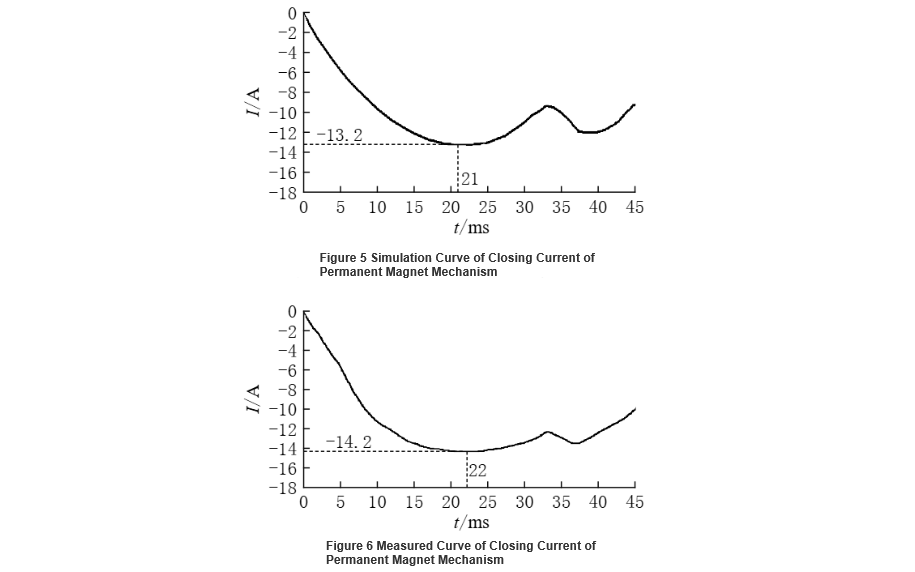
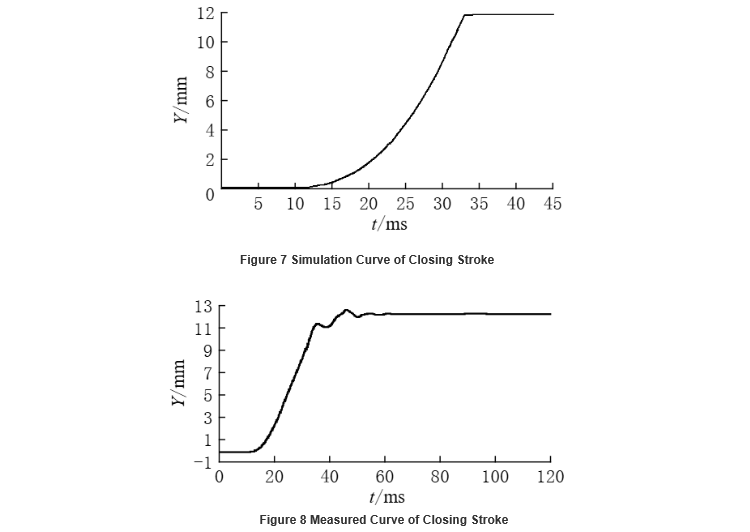
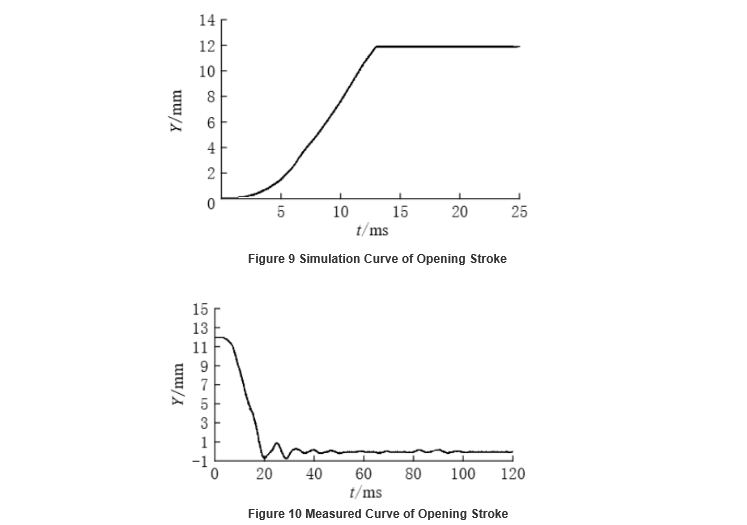
Электрические и механические характеристики прямодействующего постоянномагнитного механизма анализируются с помощью сочетания имитационного моделирования в Ansoft и фактических испытаний продукта, с акцентом на характеристиках тока и хода закрытия и открытия. Рисунок 5 показывает кривую имитированного тока закрытия, пиковый ток составляет 13,2 А. Рисунок 6 показывает измеренный осциллографом ток закрытия, измеренный пиковый ток составляет 14,2 А. Рисунок 7 представляет собой кривую имитированного хода закрытия, средняя скорость закрытия (средняя скорость на последних 6 мм до контакта) составляет 0,8 м/с. Рисунок 8 показывает измеренную осциллографом скорость закрытия, которая составляет 0,75 м/с. Результаты показывают, что механические характеристики закрытия разработанного прямодействующего постоянномагнитного механизма для твердотельного кольцевого распределительного устройства соответствуют требованиям коммутационного оборудования, а погрешность между результатами имитационного моделирования и экспериментов находится в допустимом диапазоне проектирования.
6. Заключение
В данной работе был разработан прямодействующий постоянномагнитный механизм для твердотельных кольцевых распределительных устройств. Токи и механические характеристики хода закрытия и открытия механизма были проанализированы и сравнены с помощью компьютерного моделирования и фактических испытаний продукта. Результаты показывают, что созданная модель динамических характеристик может служить теоретической основой для практического проектирования постоянномагнитных механизмов. Прямодействующий постоянномагнитный механизм хорошо подходит для использования в твердотельных кольцевых распределительных устройствах, обладая низким током управления и отличными механическими характеристиками, такими как скорости закрытия и открытия, полностью удовлетворяющими техническим требованиям. Это также предоставляет техническую основу для будущего развития высоковольтных синхронных выборочных выключателей по фазам.










