
Zbog visokog zahteva za miniaturizaciju u čvrsto izolovanim kružnim glavnim uređajima (RMU), tradicionalni jednosmerni mehanizmi stalnog magneta sa tri faze ne mogu da ispunjavaju opšte zahteve za miniaturizaciju opreme. Stoga, dizajniran mehanizam stalnog magneta u ovom kontekstu koristi strukturu sa tri nezavisne direktno delujuće faze. Jedinična komponenta ugaseonice svake faze je celostno odlivljena zajedno s telom RMU i spojena sa mehanizmom stalnog magneta preko izolacione štapa u linearnoj konfiguraciji. Protusila sprava za otvaranje je postavljena na pogonski vrat svakog fazevog mehanizma stalnog magneta. Ukupna struktura jednosmernog direktno delujućeg mehanizma stalnog magneta prikazana je na Slici 1, a njegov shematski prikaz unutar čvrsto izolovanog RMU prikazan je na Slici 2.


2. Matematički model pogonske šeme mehanizma stalnog magneta
Direktno delujući mehanizam stalnog magneta dizajniran ovde zasniva se na principu mehanizma stalnog magneta sa jednim stabilnim stanjem. Koristi se metoda pomicanja gde se nabijeni kondenzator razrađuje kako bi se aktivovala funkcija mehanizma stalnog magneta. Shema kruga prikazana je na Slici 3, gde C predstavlja kondenzator koji se koristi za pomicanje mehanizma stalnog magneta, R označava ekvivalentnu otpornost bobine mehanizma stalnog magneta, a L ukazuje na ekvivalentnu induktivnost bobine.

Dinamičke karakteristike mehanizma stalnog magneta sa jednim stabilnim stanjem zadovoljavaju sistem diferencijalnih jednačina prikazanih u Jednačini (1):

gde i predstavlja struju za otvaranje ili zatvaranje kroz bobinu (A); uC je početni napon na nabijenom kondenzatoru (V); R je ekvivalentna otpornost bobine (Ω); C je kapacitet nabijenog kondenzatora (F); ψ je ukupni magnetni fluks vezan za elektromagnetski sistem (Wb); m je ekvivalentna masa pokretnih delova referisana na pokretno jezgro (kg); x je pomak pokretnog jezgra (m); v je brzina pokretnog jezgra (m/s); Fx je elektromagnetska sila koja deluje na pokretno jezgro (N); Ff je protusila na pokretno jezgro (N). Rešavanje ovog sistema jednačina daje dinamičke karakteristike mehanizma stalnog magneta.

3. Ekvivalencija protusila
Glavna protusila u prekidniku kružnog glavnog uređaja uključuju pritisak kontakata ugaseonice i silu protusprave mehanizma stalnog magneta. Ova protusila su ekvivalentno referisana na pokretno jezgro mehanizma stalnog magneta. Ugaseonica ima rastojanje otvaranja kontakata od 9,5 mm i prelazak od 2,5 mm, sa ukupnim hodnikom mehanizma od 12 mm. Sile protusprave za otvaranje i kontaktne sprave merene su prema hodniku pokretanja mehanizma stalnog magneta, a kriva protusila iscrtana je na osnovu specifičnih podataka. Detaljne tačke ekvivalencije protusila prikazane su u Tabeli 1.

4. Postavljanje simulacionog modela
Dinamičke karakteristike direktno delujućeg mehanizma stalnog magneta rešavaju se metodom konačnih elemenata (FEM). Osnovni princip FEM je diskretizacija kontinualnog domena rešenja u konačan broj elemenata povezanih na čvorovima. Nakon analize pojedinačnih elemenata, vrši se globalna montaža, primenjuju se granični uslovi, a konačno rešenje dobija se putem računarskih izračunavanja. U ovom istraživanju, koristi se Ansoft softver za simulaciju konačnih elemenata kako bi se postavio simulacioni model mehanizma stalnog magneta, i postavljaju se parametri materijala njegovih komponenata. Materijal stalnog magneta definisan je kao NdFe35, a materijal nosača kao čelik-1010.
Nakon toga, dodeljuju se parametri bobine: napon na nabijanju kondenzatora je 110 V, kapacitet je 0,047 F, DC otpornost bobine je 5 Ω, broj zavojnica je 500, a induktivnost je 0,0143 H. Pošto je direktno delujući mehanizam stalnog magneta tipa sa jednim stabilnim stanjem, operacija otvaranja pokreće se silom protusprave. Stoga, potrebna je samo mala obrnuta struja kako bi se generisao obrnuti magnetni fluks za poništavanje fluksa proizvedenog stalnim magnetom, omogućavajući mehanizmu da se otvori pod dejstvom protusile protusprave. Da bi se smanjio potreban obrnuti magnetni fluks, nakon obilnih simulacija i testiranja, dodat je serijni DC otpornik od 5 Ω u pogonsku šemu za otvaranje.
Na kraju, vrši se površinsko i solidno modeliranje i mreženje mehanizma stalnog magneta. Relativno gusto mreženje primenjeno je na ključne magnetne komponente, poput pokretnog jezgra, magnetnih krajnjih kapaka, nosača i stalnog magneta, dok je za nemagnetne delove korišćeno grubo mreženje.
5. Analiza rezultata simulacije i eksperimenta
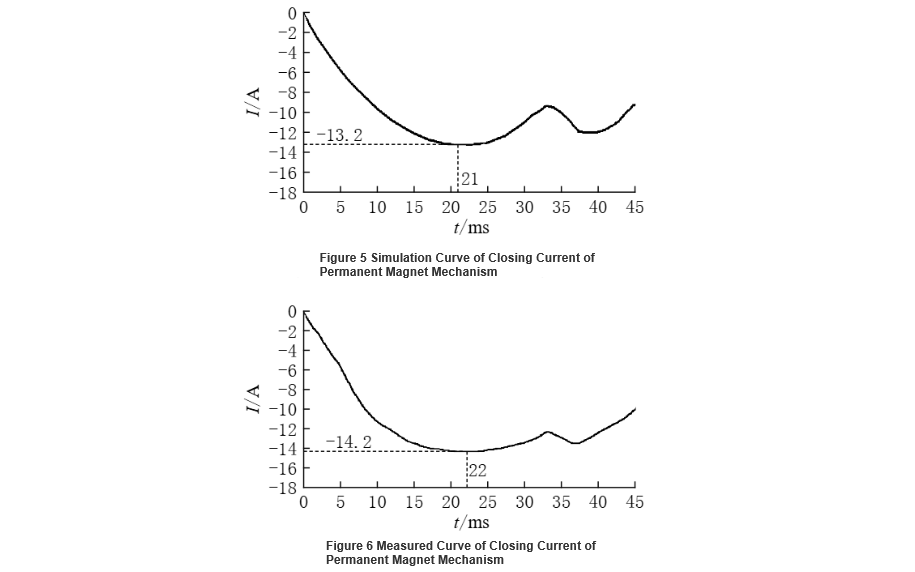
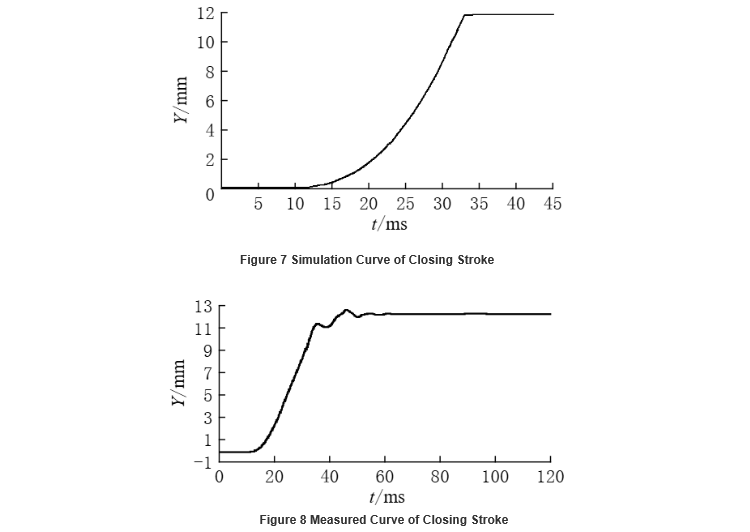
Električke i mehaničke karakteristike direktno delujućeg mehanizma stalnog magneta analizirane su kombinacijom simulacija Ansoft-a i stvarnih testova proizvoda, fokusirajući se na karakteristike struje i hodnika zatvaranja i otvaranja. Slika 5 prikazuje simuliranu krivu struje zatvaranja, sa maksimalnom strujom od 13,2 A. Slika 6 prikazuje osciloskopski merenu struju zatvaranja, sa izmerenim maksimumom od 14,2 A. Slika 7 prikazuje simuliranu krivu hodnika zatvaranja, dajući brzinu zatvaranja (prosečnu brzinu u poslednjih 6 mm pre zatvaranja kontakta) od 0,8 m/s. Slika 8 prikazuje osciloskopski merenu brzinu zatvaranja, koja iznosi 0,75 m/s. Rezultati pokazuju da mehaničke karakteristike zatvaranja dizajniranog direktno delujućeg mehanizma stalnog magneta za čvrsto izolovani kružni glavni uređaj ispunjavaju zahteve za aparaturnim uređajima, a greška između simulacije i eksperimentalnih rezultata pada u prihvatljiv opseg dizajna.
6. Zaključak
Ovaj rad dizajnira direktno delujući mehanizam stalnog magneta za čvrsto izolovane kružne glavne uređaje. Struje i mehaničke karakteristike hodnika zatvaranja i otvaranja mehanizma analizirane su i upoređene korišćenjem računarske simulacije i stvarnih testova proizvoda. Rezultati pokazuju da postavljeni model simulacije dinamičkih karakteristika može poslužiti kao teorijska osnova za praktični dizajn mehanizama stalnog magneta. Direktno delujući mehanizam stalnog magneta dobro se preporučuje za korišćenje u čvrsto izolovanim kružnim glavnim uređajima, sa niskom strujom pomicanja i odličnim mehaničkim performansama, poput brzine zatvaranja i otvaranja, puno ispunjavajući tehničke zahteve. Takođe, pruža tehničku osnovu za budući razvoj visokonaponskih sinkronih prekidača sa selekcijom faza.










