
Z powodu wysokiego popytu na miniaturyzację w jednostkach głównych pierścieniowych (RMU) z cieczową izolacją, tradycyjne mechanizmy magnesów permanentnych z trójfazowym zabezpieczeniem nie spełniają ogólnych wymagań dotyczących miniaturyzacji sprzętu. W związku z tym zaprojektowany mechanizm magnesu permanentnego wykorzystuje strukturę bezpośrednio działającą i niezależną dla każdej fazy. Jednostka komory gaszenia łuku każdej fazy jest odlewana monolitycznie z korpusem RMU i połączona z mechanizmem magnesu permanentnego poprzez izolator w konfiguracji liniowej. Sprężyna przeciwotwierająca jest umieszczona na wałku napędowym mechanizmu magnesu permanentnego każdej fazy. Całkowita struktura pojedynczego mechanizmu magnesu permanentnego o działaniu bezpośredni jest przedstawiona na Rysunku 1, a schemat montażowy wewnątrz RMU z cieczową izolacją jest pokazany na Rysunku 2.


2. Model matematyczny obwodu napędowego mechanizmu magnesu permanentnego
Zaprojektowany mechanizm magnesu permanentnego o działaniu bezpośrednim oparty jest na zasadzie mechanizmu magnesu permanentnego o jednym stabilnym stanie. Wykorzystuje on metodę napędową, w której kondensator podzielony na energię uruchamia mechanizm magnesu permanentnego. Schemat obwodu przedstawiony jest na Rysunku 3, gdzie C oznacza kondensator używany do napędzania mechanizmu magnesu permanentnego, R oznacza równoważne opory cewki mechanizmu magnesu permanentnego, a L oznacza równoważną indukcyjność cewki.

Dynamika mechanizmu magnesu permanentnego o jednym stabilnym stanie spełnia układ równań różniczkowych przedstawiony w Równaniu (1):

gdzie i to prąd otwierający lub zamykający przez cewkę (A); uC to początkowe napięcie kondensatora (V); R to równoważna opór cewki (Ω); C to pojemność kondensatora (F); ψ to całkowite wiązanie magnetyczne systemu elektromagnetycznego (Wb); m to równoważna masa ruchomych części odniesiona do ruchomego rdzenia (kg); x to przemieszczenie ruchomego rdzenia (m); v to prędkość ruchomego rdzenia (m/s); Fx to siła elektromagnetyczna działająca na ruchomy rdzeń (N); Ff to siła przeciwodwierająca na ruchomym rdzeniu (N). Rozwiązanie tego układu równań daje dynamikę mechanizmu magnesu permanentnego.

3. Ekwivalencja sił przeciwodwierających
Główne siły przeciwodwierające w obwodzie automatu głównego jednostki pierścieniowej obejmują ciśnienie kontaktowe komory gaszenia łuku i siłę sprężyny przeciwotwierającej mechanizmu magnesu permanentnego. Te siły przeciwodwierające są ekwiwalentnie odniesione do ruchomego rdzenia mechanizmu magnesu permanentnego. Komora gaszenia łuku ma odległość otwarcia kontaktu wynoszącą 9,5 mm i przeprzewód 2,5 mm, z całkowitym przebiegiem mechanizmu 12 mm. Siły sprężyny przeciwotwierającej i sprężyny kontaktowej są mierzone według przebiegu ruchu mechanizmu magnesu permanentnego, a krzywa sił przeciwodwierających jest sporządzana na podstawie konkretnych danych. Szczegółowe punkty ekwiwalencji sił przeciwodwierających przedstawione są w Tabeli 1.

4. Utworzenie modelu symulacyjnego
Dynamika mechanizmu magnesu permanentnego o działaniu bezpośrednim jest rozwiązywana za pomocą metody elementów skończonych (MES). Podstawowa zasada MES polega na dyskretyzacji ciągłej dziedziny rozwiązania na skończoną liczbę elementów połączonych w węzłach. Po analizie poszczególnych elementów wykonuje się globalne montowanie, stosuje warunki brzegowe, a ostateczne rozwiązanie uzyskuje się poprzez obliczenia komputerowe. W tym badaniu wykorzystano oprogramowanie symulacyjne MES Ansoft do utworzenia modelu symulacyjnego mechanizmu magnesu permanentnego, oraz ustalono parametry materiałowe jego komponentów. Materiał magnesu permanentnego został zdefiniowany jako NdFe35, a materiał serca jako stal-1010.
Następnie przypisano parametry cewki: napięcie ładowania kondensatora wynosi 110 V, pojemność wynosi 0,047 F, opór DC cewki wynosi 5 Ω, liczba zwitków wynosi 500, a indukcyjność wynosi 0,0143 H. Ponieważ mechanizm magnesu permanentnego o działaniu bezpośrednim jest typu jedno-stabilnego, operacja otwierania jest napędzana przez siłę sprężyny przeciwotwierającej. W związku z tym potrzebny jest tylko mały odwrotny prąd, aby wytworzyć odwrotny strumień magnetyczny, który anuluje strumień magnetyczny generowany przez magnes permanentny, umożliwiając otwarcie mechanizmu pod wpływem siły sprężyny. Aby zmniejszyć wymagany odwrotny strumień magnetyczny, po wielu symulacjach i testach, dodano szeregowo 5 Ω rezystor DC w obwodzie napędowym otwierania.
Na koniec przeprowadzono modelowanie powierzchniowe i bryłowe oraz siatkowanie mechanizmu magnesu permanentnego. Stosowano stosunkowo gęstą siatkę dla kluczowych elementów magnetycznych, takich jak ruchomy rdzeń, końcówki magnetyczne, serce i magnes permanentny, podczas gdy dla części niemagnetycznych stosowano rzadszą siatkę.
5. Analiza wyników symulacji i eksperymentów
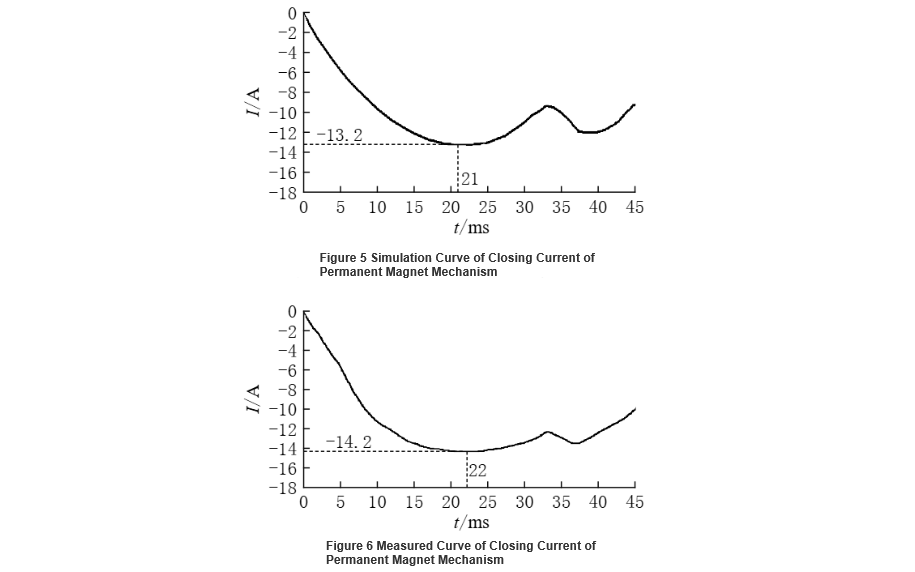
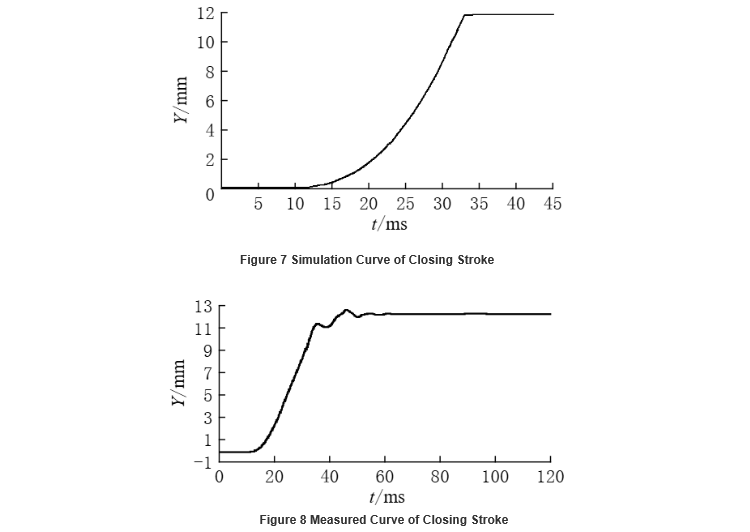
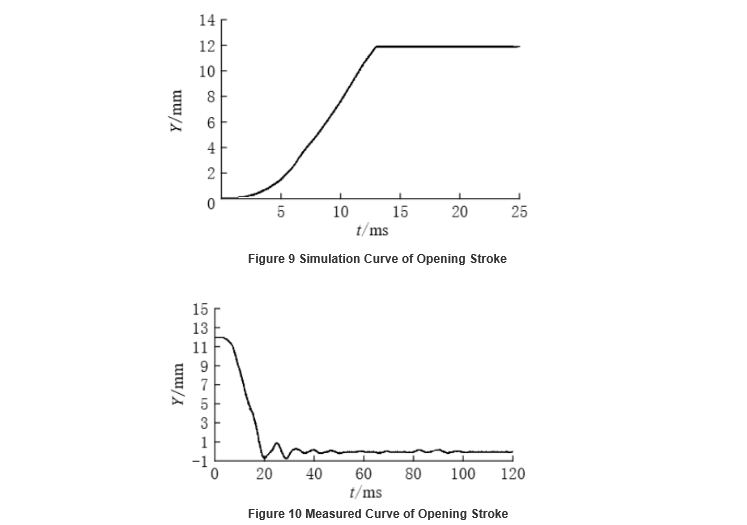
Analizowane są cechy elektryczne i mechaniczne mechanizmu magnesu permanentnego o działaniu bezpośrednim, łącząc symulacje Ansoft z rzeczywistymi testami produktu, koncentrując się na prądach zamykających i otwierających oraz charakterystykach przebiegu. Rysunek 5 przedstawia symulowaną krzywą prądu zamykającego, z maksymalnym prądem 13,2 A. Rysunek 6 przedstawia pomierzony oscyloskopem prąd zamykający, z mierzonym maksimum 14,2 A. Rysunek 7 przedstawia symulowaną krzywą przebiegu zamykania, dając prędkość zamykania (średnia prędkość w ostatnich 6 mm przed zamknięciem kontaktu) 0,8 m/s. Rysunek 8 przedstawia pomierzoną oscyloskopem prędkość zamykania, która wynosi 0,75 m/s. Wyniki wskazują, że mechaniczne cechy zamykania zaprojektowanego mechanizmu magnesu permanentnego o działaniu bezpośrednim dla RMU z cieczową izolacją spełniają wymagania aparatury przełącznikowej, a błąd między wynikami symulacji a eksperymentem mieści się w akceptowalnym zakresie projektowania.
6. Wnioski
W tym artykule zaprojektowano mechanizm magnesu permanentnego o działaniu bezpośrednim dla RMU z cieczową izolacją. Prądy zamykające i otwierające oraz mechaniczne cechy przebiegu mechanizmu zostały przeanalizowane i porównane za pomocą symulacji komputerowej i rzeczywistych testów produktu. Wyniki wskazują, że utworzony model symulacji dynamicznej może służyć jako teoretyczna podstawa dla praktycznego projektowania mechanizmu magnesu permanentnego. Mechanizm magnesu permanentnego o działaniu bezpośrednim jest dobrze przystosowany do zastosowania w RMU z cieczową izolacją, charakteryzuje się niskim prądem napędowym i doskonałymi właściwościami mechanicznymi, takimi jak prędkości zamykania i otwierania, w pełni spełniając techniczne wymagania. Daje to również techniczne podstawy dla przyszłego rozwoju synchronicznych przełączników wyboru fazy wysokiego napięcia.










