
Tā kā ir liela pieprasījums pēc mazgabala solidi izolētajos apgaismošanas aprikojuma (RMU) ierīkās, tradicionālie vienreizīgie pastāvīgā magnēta mehānismi ar trīs fāžu savstarpējo bloķēšanu nevar atbilst ierīču kopējam mazgabaluma prasībām. Tādēļ šajā kontekstā izstrādātais pastāvīgā magnēta mehānisms izmanto trīs fāžu neatkarīgu tiešdarbības struktūru. Katras fāzes loksnes iznīcināšanas kameras vienība tiek gudrēta kopā ar RMU gudres masu un savienota ar pastāvīgā magnēta mehānismu izolēto stāvi taisnā konfigurācijā. Atveršanas pretspēka sprindzene katram fāzes pastāvīgā magnēta mehānismam tiek novietota uz virzības ass. Viens tiešdarbības pastāvīgā magnēta mehānisma vispārējā struktūra ir parādīta 1. attēlā, un tā montāžas shēma solidi izolētajā RMU ir attēlota 2. attēlā.


2. Pastāvīgā magnēta mehānisma virzības ceļa matemātiskais modelis
Šeit izstrādātais tiešdarbības pastāvīgā magnēta mehānisms balstīts uz vienvietīga stabila stāvokļa pastāvīgā magnēta mehānisma principiem. Tas izmanto virzības metodi, kurā uzsādināta kondensators izlādējas, lai aktivizētu pastāvīgā magnēta mehānismu. Ceļa shēma ir parādīta 3. attēlā, kur C apzīmē kondensatoru, ko izmanto pastāvīgā magnēta mehānisma virzīšanai, R norāda pastāvīgā magnēta mehānisma spuldzes ekvivalento rezistenci, un L norāda spuldzes ekvivalento induktīvību.

Vienvietīga stabila stāvokļa pastāvīgā magnēta mehānisma dinamiskās īpašības apmierina diferenciālvienādojumu sistēmu, kas parādīta (1). vienādojumā:

kur i ir caur spuldzi ejamo vai slēdzamu strāvas (A); uC ir uzsādinātā kondensatora sākotnējā sprieguma (V); R ir spuldzes ekvivalentā rezistence (Ω); C ir uzsādinātā kondensatora kapacitāte (F); ψ ir elektromagnētiskā sistēmas kopējā magnētiskā saistība (Wb); m ir kustīgo daļu ekvivalentā masa, atnosota uz kustīgo kodolu (kg); x ir kustīgā kodola pārbīde (m); v ir kustīgā kodola ātrums (m/s); Fx ir elektromagnētiskā spēka, kas iedarbojas uz kustīgo kodolu (N); Ff ir pretspēka, kas iedarbojas uz kustīgo kodolu (N). Šīs vienādojumu sistēmas atrisināšana sniedz pastāvīgā magnēta mehānisma dinamiskās īpašības.

3. Pretspēku ekvivalents
Galvenie pretspēki apgaismošanas aprikojuma automātā ietver loksnes iznīcināšanas kameras kontaktu spiedienu un pastāvīgā magnēta mehānisma atveršanas sprindzenes spēku. Šīs pretspēkes tiek ekvivalenti nosaukts pastāvīgā magnēta mehānisma kustīgajam kodolam. Loksnes iznīcināšanas kamers ir ar 9,5 mm kontaktu atstarpi un 2,5 mm pārspiedumu, kopējā mehānisma pārbīde ir 12 mm. Atveršanas sprindzenes un kontaktu sprindzenes pretspēkas tiek mērītas atbilstoši pastāvīgā magnēta mehānisma kustības pārbīdei, un pretspēku grafiks tiek izveidots atbilstoši konkrētiem datiem. Detalizētie pretspēku ekvivalenta punkti ir parādīti 1. tabulā.

4. Modelēšanas modeļa izveide
Tiešdarbības pastāvīgā magnēta mehānisma dinamiskās īpašības tiek atrisinātas, izmantojot galveno elementu metodi (FEM). FEM pamatprincipi ir nepārtrauktu risinājumu domēna diskretizācija līdz galvenajiem elementiem, kas savstarpēji savienoti mezgli. Pēc atsevišķu elementu analīzes veikts globāls apkopošanas process, piemēroti robežas nosacījumi, un beigu risinājums tiek iegūts datora aprēķinos. Šajā pētījumā tiek izmantota Ansoft galveno elementu simulācijas programma, lai izveidotu pastāvīgā magnēta mehānisma simulācijas modeli, un tika iestatīti tā komponentu materiālu parametri. Pastāvīgā magnēta materiāls ir definēts kā NdFe35, un klusuma materiāls kā steel-1010.
Nākamais, tiek piešķirti spuldzes parametri: kondensatora uzlādes spriegums ir 110 V, kapacitāte ir 0,047 F, spuldzes GKS rezistence ir 5 Ω, skaitlis ir 500, un induktīvība ir 0,0143 H. Tā kā tiešdarbības pastāvīgā magnēta mehānisms ir vienvietīgs, atveršanas operācija tiek virzīta ar atveršanas sprindzenes spēku. Tādēļ, lai veicinātu atveršanu, ir nepieciešama tikai maza otrādi strāva, lai radītu otrādu magnētisko saistību, kas atceltu pastāvīgā magnēta radīto saistību, ļaujot mehānismam atvērt sprindzenes pretspēka dēļ. Lai samazinātu nepieciešamo otrādo magnētisko saistību, pēc plašas simulācijas un testēšanas, atveršanas virzības ceļā tika pievienota 5 Ω GKS rezistora sērijas savienojums.
Visbeidzot, tiek veikta pastāvīgā magnēta mehānisma virsgraudas un telpiskā modelēšana un tīkla izveidošana. Relatīvi blīvs tīkls tiek piemērots galvenajiem magnētiskajiem komponentiem, piemēram, kustīgajam kodolam, magnētiskajiem galvenajiem, klusumam un pastāvīgajam magnētam, bet salīdzinoši rets tīkls tiek izmantots nemagnētiskajiem daļējiem.
5. Simulāciju un eksperimentālo rezultātu analīze
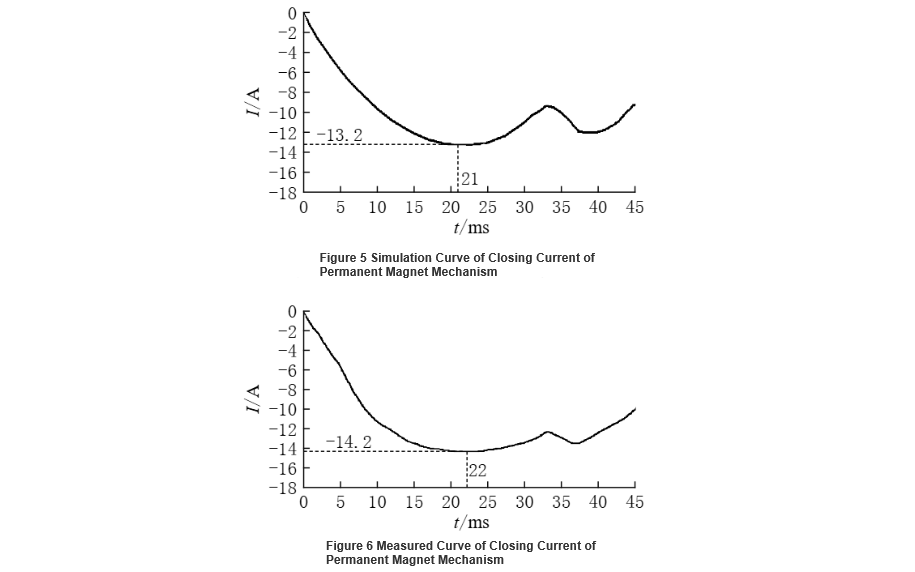
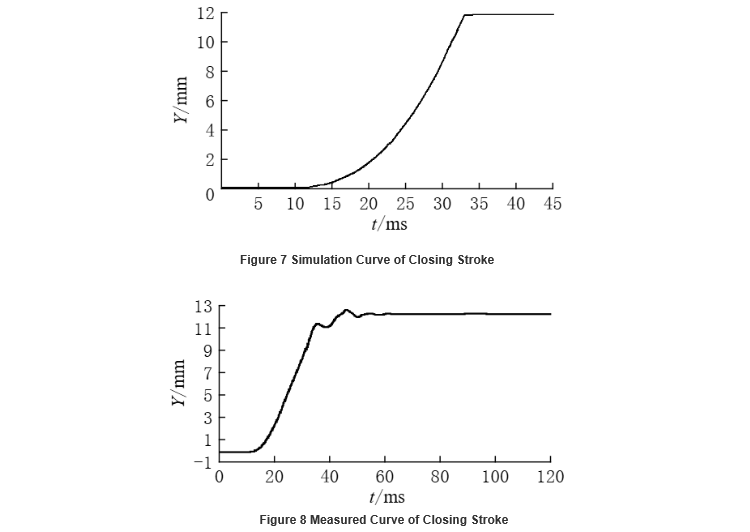
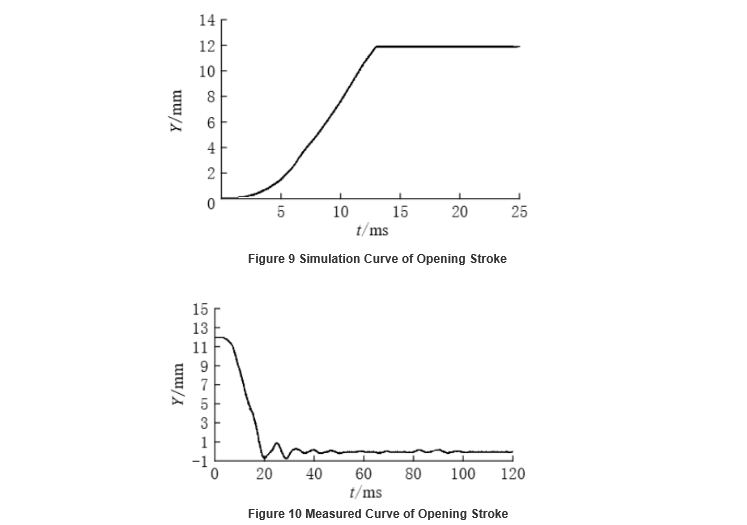
Tiešdarbības pastāvīgā magnēta mehānisma elektriskās un mehāniskās īpašības tiek analizētas, kombinējot Ansoft simulācijas ar faktiskajiem produktu testiem, pievēršoties galvenokārt slēdzamā un atveršamā strāvai un pārbīdes īpašībām. 5. attēls parāda simulēto slēdzamā strāvas krivuli, ar maksimālo strāvu 13,2 A. 6. attēls parāda oscilometrs mērīto slēdzamā strāvu, ar mērīto maksimumu 14,2 A. 7. attēls parāda simulēto slēdzamā pārbīdes krivuli, kas dod slēdzamā ātrumu (vidējais ātrums pēdējos 6 mm līdz kontaktu slēgšanai) 0,8 m/s. 8. attēls parāda oscilometrs mērīto slēdzamā ātrumu, kas ir 0,75 m/s. Rezultāti liecina, ka izstrādātā tiešdarbības pastāvīgā magnēta mehānisma slēdzamā mehāniskās īpašības solidi izolētajam apgaismošanas aprikojuma automātam atbilst avārijās varoņu prasībām, un simulācijas un eksperimentālo rezultātu kļūda atrodas pieņemamā projektēšanas robežā.
6. Secinājumi
Šajā rakstā tika izstrādāts tiešdarbības pastāvīgā magnēta mehānisma solidi izolētajiem apgaismošanas aprikojuma automātiem. Mehānisma slēdzamā un atveršamā strāvas un mehāniskās pārbīdes īpašības tika analizētas un salīdzinātas, izmantojot datoru simulāciju un faktisku produktu testēšanu. Rezultāti rāda, ka izveidotais dinamisko īpašību simulācijas modelis var kļūt par teorētisko pamatu praktiskam pastāvīgā magnēta mehānisma projektēšanai. Tiešdarbības pastāvīgā magnēta mehānisma labi piemērots solidi izolētiem apgaismošanas aprikojuma automātiem, ar zemu virzības strāvu un labām mehāniskām īpašībām, piemēram, slēdzamā un atveršamā ātrumi, pilnībā atbilstot tehniskām prasībām. Tas arī nodrošina tehnisko pamatu nākotnes augstsprieguma sinhrono fāžu izvēles avārijās varoņu attīstībai.










