
Solid izolyatsiyali kengashli vositalar (RMU) uchun minimalashtirish talablarining yuqori bo'lganligi sababli, uch fazalik birbiriga bog'langan doimiy magnit mekanizmlari jamiy qurilma minimalashtirish talablari bilan javob berolmaydi. Shuning uchun, bu kontekstda dizayn etilgan doimiy magnit mekanizmi uch fazalik mustaqil to'g'ridan-to'g'ri ishlovchi struktura orqali amalga oshiriladi. Har bir fazaning arka yoyuv kamerasi birligi RMU nekliqlantirilgan qismi bilan butunlay nekliqlantiriladi va doimiy magnit mekanizmiga chiziqli shaklda dielektrik chid bilan ulangan. Har bir fazaning doimiy magnit mekanizmi haydavachisi ustida ochish qarama kuch springeri joylashtirilgan. Bitta to'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmin umumiy strukturasini Rasm 1, solid izolyatsiyali RMU ichidagi montaj skemasi esa Rasm 2 da ko'rsatilgan.


2. Doimiy magnit mekanizmini haydavchi elektr tarmogining matematik modeli
Bu yerda dizayn etilgan to'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmi bittagina stabil holatli doimiy magnit mekanizmi printsipida asoslanadi. U energiya bilan to'ldirilgan kondensatorning ishlatilishi orqali doimiy magnit mekanizmini haydavchilik usuli bilan ishlatiladi. Tarmoq shemasini Rasm 3 da ko'rsatilgan, bu yerda C - doimiy magnit mekanizmini haydavchi kondensator, R - doimiy magnit mekanizmi spiralin ekvivalent qiymatli omili, L - spiralin ekvivalent induktivligi.

Bittagina stabil holatli doimiy magnit mekanizmin dinamik xususiyatlari Tenglama (1) da ko'rsatilgan differensial tenglamalar sistemasini qanoatlantiradi:

bu yerda i - spiraldan o'tadigan ochish yoki yopish jarayonidagi oqim (A); uC - zaryadlangan kondensatorning boshlang'ich voltaji (V); R - spiraldagi ekvivalent omili (Ω); C - zaryadlangan kondensatorning kapasitansi (F); ψ - elektromagnit tizimning umumiy magnit flukssalishligi (Wb); m - harakat qiluvchi qismlarning nisbiy massasi (kg); x - harakat qiluvchi qismning bosqichi (m); v - harakat qiluvchi qismning tezligi (m/s); Fx - harakat qiluvchi qismga ta'sir etuvchi elektromagnit kuchi (N); Ff - harakat qiluvchi qismga qarama kuchi (N). Bu tenglamalar sistemasini yechish orqali doimiy magnit mekanizmining dinamik xususiyatlari aniqlanadi.

3. Qarama kuchlar nisbatan ekvivalentlik
Doimiy magnit mekanizmiga nisbatan kengashli vosita kuchlashmoqda. Bu kuchlar arka yoyuv kamerasining kontakt bosimi va doimiy magnit mekanizmin ochish springeri kuchi hisoblanadi. Bu kuchlar doimiy magnit mekanizmin harakat qiluvchi qismiga nisbatan ekvivalentlikda hisoblanadi. Arka yoyuv kamerasining kontakt ochish masofasi 9.5 mm, ortiqcha bosish 2.5 mm, jami mekanizmning bosqichi 12 mm. Doimiy magnit mekanizmin harakatlanish bosqigiga nisbatan ochish springer va kontakt springer kuchlari o'lchanadi va aniq ma'lumotlar asosida qarama kuch chizig'i chiziladi. Aniq qarama kuch ekvivalentlik nuqtalari Jadvall 1 da ko'rsatilgan.

4 Modellashtirish modelini tuzish
To'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmining dinamik xususiyatlari sonli usul (FEM) orqali yechiladi. FEMning asosiy printsipi - davrlantirilayotgan yechim sohasini chekli elementlar soniga ajratish va ularni tugundorlarni orqali bog'lash. Har bir element tahlilidan so'ng, global montaj amalga oshiriladi, chegaraviy shartlar qo'yiladi va kompyuter yordamida nihoyatgi yechim olinadi. Bu tadqiqotda Ansoft sonli usul modellashtirish dasturi orqali doimiy magnit mekanizmining modellashtirish modeli tuziladi va uning komponentlari material parametrlari belgilanadi. Doimiy magnit materiali NdFe35, mayka materiali - stal-1010 deb aniqlangan.
Keyin spiral parametrlari belgilanadi: kondensatorning zaryadlanish voltaji 110 V, kapasitansi 0.047 F, spiralning doimiy omili 5 Ω, guruhlari soni 500, induktivligi 0.0143 H. To'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmi bittagina stabil holatli bo'lgani uchun, ochish operatsiyasi ochish springeri kuchi orqali haydalanadi. Shuning uchun, faqat kichik teskari oqim kerak bo'lib, doimiy magnit tomonidan yaratilgan magnit fluksga qarama bo'lgan teskari magnit fluksni yaratish uchun. Teskari magnit fluksni kamaytirish uchun, ko'p modellashtirish va sinovlar natijasida, ochish haydavchi tarmog'iga 5 Ω doimiy omili qo'shiladi.
Nihoyat, doimiy magnit mekanizmi uchun sirtli va jismlarga modellashtirish va setka tashkil etiladi. Harakat qiluvchi qism, magnit pastki qopkalari, mayka va doimiy magnit kabi muhim magnit komponentlari uchun aniqroq setka, magnit emas qismlar uchun esa aniqsizroq setka ishlatiladi.
5 Modellashtirish va sinov natijalarini tahlil qilish
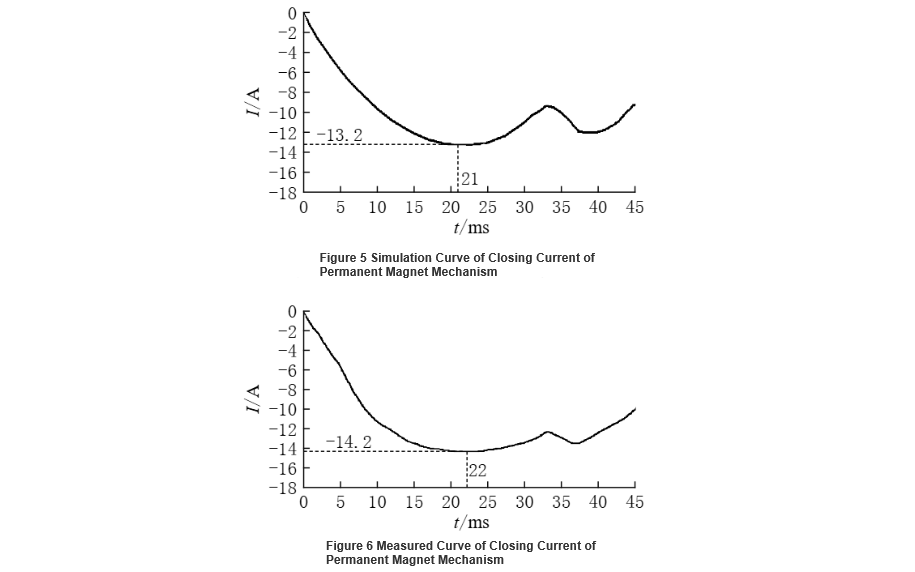
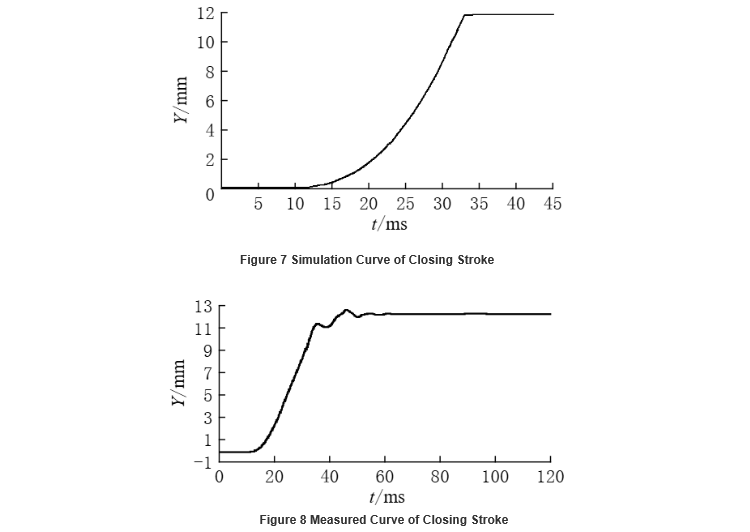
To'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmining elektr va mexanik xususiyatlari Ansoft modellashtirishlari va faktiki mahsulot sinovlari orqali yopish va ochish oqimlari va bosqich xususiyatlari ustida tahlil qilinadi. Rasm 5 simulatsiya orqali yopish oqim chizig'ini, maksimal oqim 13.2 A ni, Rasm 6 osiloskop orqali olingan yopish oqimini, olingan maksimal oqim 14.2 A ni, Rasm 7 simulatsiya orqali yopish bosqich chizig'ini, yopish tezligi (kontakt yopilishdan oldin oxirgi 6 mm bo'lgan oraliqdagi o'rtacha tezlik) 0.8 m/s, Rasm 8 osiloskop orqali olingan yopish tezligini, 0.75 m/s ni ko'rsatadi. Natijalar doimiy magnit mekanizmining dizaynlangan to'g'ridan-to'g'ri ishlovchi qurilmasining yopish mexanik xususiyatlari kengashli vositalar talablari bilan javob beradi va modellashtirish va sinov natijalari orasidagi xatolik qabul qilinishi mumkin bo'lgan dizayn diapazonida yotadi.
6 Xulosa
Bu maqulada solid izolyatsiyali kengashli vositalar uchun to'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmi dizayn etilgan. Mekanizmin yopish va ochish oqimlari va mexanik bosqich xususiyatlari kompyuter orqali modellashtirish va faktiki mahsulot sinovlari orqali tahlil va solishtirilgan. Natijalar tuzilgan dinamik xususiyat modellashtirish modelining praktik doimiy magnit mekanizmi dizayni uchun nazariy asos bo'lishi ekanini ko'rsatadi. To'g'ridan-to'g'ri ishlovchi doimiy magnit mekanizmi solid izolyatsiyali kengashli vositalar uchun mos keladi, unda yopish va ochish tezligi kabi yaxshi mexanik xususiyatlari mavjud, texnik talablarni to'liq qanoatlantiradi. Bu yuqori voltajli sinkron fase tanlash vositalarini rivojlantirish uchun ham texnik asos yaratadi.










