
Kuna solidaarselt-isoleeritud ringlõiguri (RMU) miniaturiseerimise nõudlus on kõrge, ei saa traditsioonilised ühe püsisemagnetmehhanismiga kolmefaasilised lukuühendused rahuldada seadme üldist miniaturiseerimisnõuet. Seetõttu kasutab siin disainitud püsisemagnetmehhanism kolme faasi sõltumatut otsestehtavat struktuuri. Iga faasi väljapäästekamberühik on üheskoos võideldud RMU kaevanduskehasse ja ühendatud püsisemagnetmehhanismiga insuleeriva tiibiga lineaarses konfiguratsioonis. Avamisel vastastuuline vedru asetatakse iga faasi püsisemagnetmehhanismi juhtteljele. Ühe otsestehtava püsisemagnetmehhanismi üldine struktuur on näidatud Joonis 1 ja selle monteerimise skeem solidaarselt-isoleeritud RMUs on illustreeritud Joonis 2.


2. Püsisemagnetmehhanismi juhttsirkui matemaatiline mudel
Siin disainitud otsestehtav püsisemagnetmehhanism põhineb ühe stabiilse oleku püsisemagnetmehhanismi printsiibil. See kasutab juhtmeetodit, kus laetud kondensaator lahutab, et käivitada püsisemagnetmehhanism. Tsirkuitskeem on näidatud Joonis 3, kus C tähistab kondensaatorit, mida kasutatakse püsisemagnetmehhanismi juhtmiseks, R tähistab püsisemagnetmehhanismi keha ekvivalentset vastust ja L tähistab keha ekvivalentset induktiivsust.

Ühe stabiilse olekuga püsisemagnetmehhanismi dünaamilised omadused rahuldavad diferentsiaalvõrrandite süsteemi, mis on näidatud Võrrand 1:

kus i on keha läbitsev avamise või sulgemise vool (A); uC on laetava kondensaatori algne laduvolt (V); R on keha ekvivalentne vastus (Ω); C on laetava kondensaatori kapasitants (F); ψ on elektro-magnetilise süsteemi kogu magneetiline flux (Wb); m on liiguvate osade ekvivalentne mass viitav liiguvale tuumale (kg); x on liiguv tuuma teepikkus (m); v on liiguv tuuma kiirus (m/s); Fx on elektromagnetiline jõud, mis mõjub liiguvale tuumale (N); Ff on vastastuuline jõud, mis mõjub liiguvale tuumale (N). Selle võrrandite süsteemi lahendamine annab püsisemagnetmehhanismi dünaamilised omadused.

3. Vastastuuliste jõudude ekvivalentsus
Ringlõiguri katkestaja peamised vastastuulised jõud hõlmavad väljapäästekambri kontaktipressi ja püsisemagnetmehhanismi avamisel vastastuulist vedrujõudu. Need vastastuulised jõud viiakse ekvivalenttsemaks püsisemagnetmehhanismi liiguvale tuumale. Väljapäästekamberil on kontaktide avamisvahemaa 9,5 mm ja ületöö 2,5 mm, koguseadmega 12 mm. Avamisel vastastuuline vedru- ja kontaktiveedrujõud mõõdetakse püsisemagnetmehhanismi liikumisvahemaa järgi ja vastastuuline jõudjoon joonestatakse konkreetsete andmete alusel. Detailne vastastuuliste jõudude ekvivalentsuspunktid on näidatud Tabel 1.

4. Simulatsioonimudeli loomine
Otsestehtava püsisemagnetmehhanismi dünaamilisi omadusi lahendatakse elementide meetodil (FEM). FEM põhiline printsiip on pideva lahendusalaga diskreetida piiratud arvu elemendiks, mis on ühendatud servadega. Pärast iga elemendi analüüsi tehakse üldine kokkupanek ja rakendatakse servatingimusi, lõplik lahendus saadakse arvuti arvutamisel. Selles uurimuses kasutatakse Ansofti elementide simulatsioonitarkvara, et luua püsisemagnetmehhanismi simulatsioonimudel, ja selle komponentide materjalparameetrid määratakse. Püsimagneeti materjal defineeritakse kui NdFe35 ja paljande materjal kui terase-1010.
Järgmisena määratakse keha parameetrid: kondensaatori laetav laduvolt on 110 V, kapasitants on 0,047 F, keha DC-vastus on 5 Ω, keerete arv on 500 ja induktiivsus on 0,0143 H. Kuna otsestehtav püsisemagnetmehhanism on ühe stabiilse olekuga, siis avamisel juhib avamisel vastastuuline vedrujõud. Seetõttu on vaja ainult väikest vastastuulist voolu, et luua vastastuuline magneetiline flux, mis tühistab püsimagneeti poolt toodetud fluxi, lubades mehhanismil avuda vastastuulise vedrujõu all. Vajaliku vastastuulise magneetiline fluxi vähendamiseks, pärast laiaulatuslikku simulatsiooni ja testimist, lisatakse avamisel juhttsirkuiti sarja 5 Ω DC-vastus.
Lõpuks tehakse püsisemagnetmehhanismile pinna- ja ruumilise modelleerimine ning võrgustik. Relatiivselt tiheda võrgustiku kasutatakse olulistele magneetkomponentidele, nagu liiguv tuuma, magneetlikud otsikapid, paljand ja püsimagneet, samas kui mittemagneetiliste osade puhul kasutatakse varrema võrgustikku.
5. Simulatsiooni ja eksperimentaalsete tulemuste analüüs
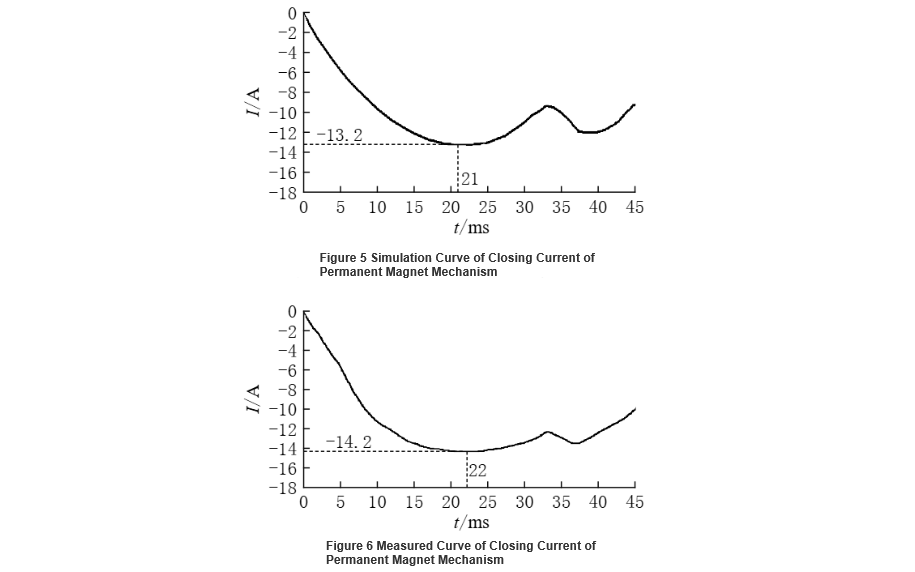
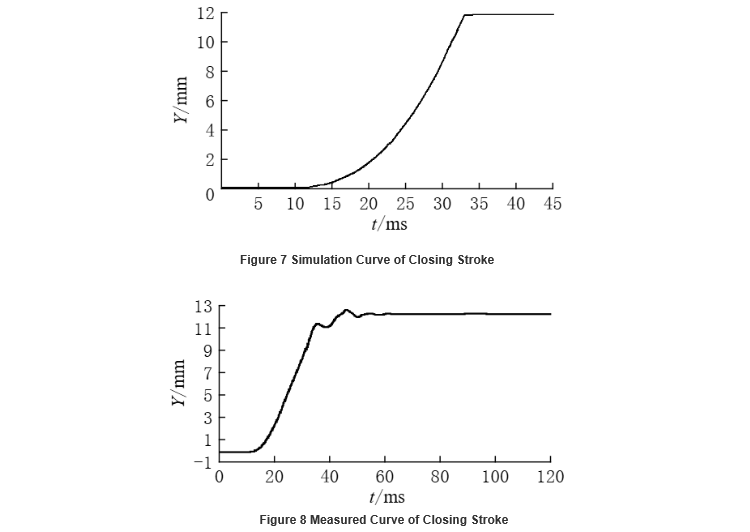
Otsestehtava püsisemagnetmehhanismi elektrilised ja mehaanilised omadused analüüsitakse Ansofti simulatsioonide ja tegeliku toote testimiste kombinatsiooniga, keskendudes sulgemise ja avamise voolu ning liikumisvahemaa omadustele. Joonis 5 näitab simulatsioonilist sulgemise voolu, mille tippvool on 13,2 A. Joonis 6 näitab osiloskoop-meetodil mõõdetud sulgemise voolu, mille mõõdetud tippvool on 14,2 A. Joonis 7 näitab simulatsioonilist sulgemise liikumisvahemaa, mille sulgemiskiirus (viimased 6 mm enne kontaktiloopingu sulgemist) on 0,8 m/s. Joonis 8 näitab osiloskoop-meetodil mõõdetud sulgemiskiirust, mis on 0,75 m/s. Tulemused näitavad, et disainitud otsestehtava püsisemagnetmehhanismi sulgemisme haanikute omadused vastavad lülitiapparaatide nõuetele ja simulatsiooni ja eksperimentaalsete tulemuste vaheline vea jääb vastuvõetavale disainialasse.
6. Järeldus
Selles artiklis disainiti otsestehtav püsisemagnetmehhanism solidaarselt-isoleeritud ringlõigurite jaoks. Mehhanismi sulgemise ja avamise voolu ning mehaaniliste liikumisvahemaa omadusi analüüsitakse ja võrreldakse arvuti simulatsioonide ja tegeliku toote testimiste abil. Tulemused näitavad, et loodud dünaamiliste omaduste simulatsioonimudel võib olla praktilise püsisemagnetmehhanismi disaini teoreetiline alus. Otsestehtav püsisemagnetmehhanism sobib hästi solidaarselt-isoleeritud ringlõigurite kasutamiseks, kuna see omab madalat juhtvoolu ja suurepärast mehaanilist jõudlust, nagu sulgemise ja avamise kiirus, täielikult vastavalt tehnilistele nõuetega. See annab ka tehnoloogilise aluse tulevaste kõrgeteenusega sinkronsete faasisoovituse lülitude arendamiseks.










