
Zaradi visokih zahtev po miniaturizaciji v čvrsto izoliranih kolobarjih glavnih enot (RMU) tradicionalni mehanizmi stalnega magnetnega s trofaznim zavezanostjo ne morejo zadovoljiti splošnih zahtev za miniaturizacijo opreme. Zato oblikovan mehanizem stalnega magnetnega v tem kontekstu uporablja strukturo tri faze neodvisno delujočega mehanizma. Enota za ugasanje loka vsake faze je celostno litija z telom odlevalnice RMU in povezana z mehanizmom stalnega magnetnega preko izolacijske palice v linearni konfiguraciji. Protiprinosa za odpiranje so postavljena na pogonskih hrbtih mehanizmov stalnega magnetnega vsake faze. Splošna struktura enega neposredno delujočega mehanizma stalnega magnetnega je prikazana na Sliki 1, njegova shema montaže znotraj čvrsto izoliranega RMU pa je prikazana na Sliki 2.


2.Matematični model pogonskega kruga mehanizma stalnega magnetnega
Neposredno delujoči mehanizem stalnega magnetnega, ki je tu oblikovan, temelji na principu mehanizma stalnega magnetnega z enim stabilnim stanjem. Uporablja pogonsko metodo, kjer se nabojeven kondenzator raznaboje, da aktivira mehanizem stalnega magnetnega. Shema kruga je prikazana na Sliki 3, kjer C predstavlja kondenzator, uporabljen za pogon mehanizma stalnega magnetnega, R označuje ekvivalentni upor bobenka mehanizma stalnega magnetnega, L pa ekvivalentno induktivnost bobenka.

Dinamične značilnosti mehanizma stalnega magnetnega z enim stabilnim stanjem zadoščajo sistemu diferencialnih enačb, prikazanemu v enačbi (1):

kjer je i tok skozi bobenek pri odpiranju ali zapiranju (A); uC je začetni napon nabojenega kondenzatorja (V); R je ekvivalentni upor bobenka (Ω); C je kapacitancija nabojenega kondenzatorja (F); ψ je skupna magnetostrmina elektromagnetskega sistema (Wb); m je ekvivalentna masa gibljenih delov, ki se nanaša na gibljeni srčnik (kg); x je premik gibljenega srčnika (m); v je hitrost gibljenega srčnika (m/s); Fx je elektromagnetska sila, ki deluje na gibljeni srčnik (N); Ff je nasprotna sila na gibljenem srčniku (N). Rešitev tega sistema enačb daje dinamične značilnosti mehanizma stalnega magnetnega.

3.Ekvivalenca nasprotnej sil
Glavne nasprotne sile v odseku glavnega preklopnika vključujejo stiskanje kontakta v enoti za ugasanje loka in silo odpiranja mehanizma stalnega magnetnega. Te nasprotne sile so ekvivalentno nanašene na gibljeni srčnik mehanizma stalnega magnetnega. Enota za ugasanje loka ima razdaljo odprtja kontakta 9,5 mm in pretres 2,5 mm, s skupnim hodnikom mehanizma 12 mm. Sile odpiranja pruge in stiska kontakta so meritve glede na hodnik gibanja mehanizma stalnega magnetnega, in krivulja nasprotne sile je narisana na podlagi specifičnih podatkov. Podrobne točke ekvivalente nasprotne sile so prikazane v Tabeli 1.

4 Ustanovitev simulacijskega modela
Dinamične značilnosti neposredno delujočega mehanizma stalnega magnetnega so rešene z metodo končnih elementov (FEM). Osnovni princip FEM je, da se zvezno reševalno območje diskretizira v končno število elementov, ki so med seboj povezani v vozliščih. Po analizi posameznih elementov se izvede globalna sestava, uporabijo se robni pogoji, in končna rešitev se dobi z računalniškim računom. V tej študiji je uporabljen program za simulacijo s končnimi elementi Ansoft, da bi bil ustanovljen simulacijski model mehanizma stalnega magnetnega, in materialne parametri njegovih komponent so nastavljeni. Material stalnega magnetnega je določen kot NdFe35, material nosilca pa kot jeklo-1010.
Nato so dodeljeni parametri bobenka: nabojevni napon kondenzatorja je 110 V, kapacitancija je 0,047 F, DC upor bobenka je 5 Ω, število zvitkov je 500, in induktivnost je 0,0143 H. Ker je neposredno delujoči mehanizem stalnega magnetnega tipa z enim stabilnim stanjem, je operacija odpiranja pogonjena s silo odpiranja pruge. Zato je potreben le majhen obratni tok, da ustvari obratno magnetostrmino, ki prekrije strmino, ki jo ustvari stalni magnet, omogoča tako mehanizmu, da se odpre pod nasprotnej silo pruge. Da se zmanjša potrebna obratna magnetostrmina, je po obsežnih simulacijah in preskusih dodan 5 Ω DC upornik v vrsto v pogonski krug odpiranja.
Na koncu je izvedeno površinsko in tridimenzionalno modeliranje in mreženje mehanizma stalnega magnetnega. Na ključnih magnetnih komponentah, kot so gibljeni srčnik, magnetni pokrovci, nosilec in stalni magnet, je uporabljena relativno gosta mreža, medtem ko je za nemagnetne dele uporabljena manj gosta mreža.
5 Analiza rezultatov simulacije in preskusov
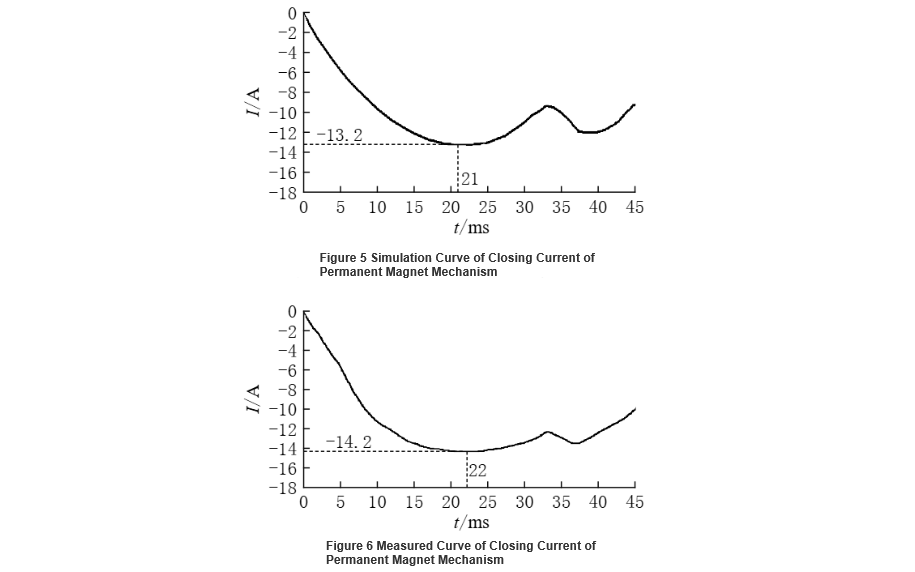
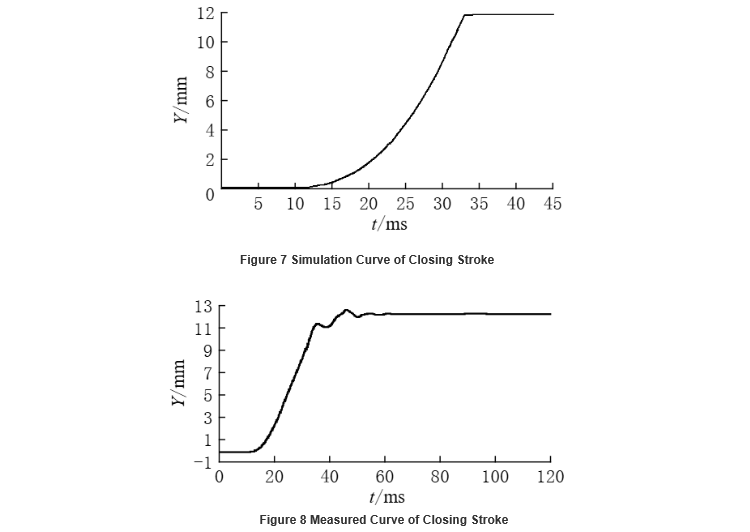
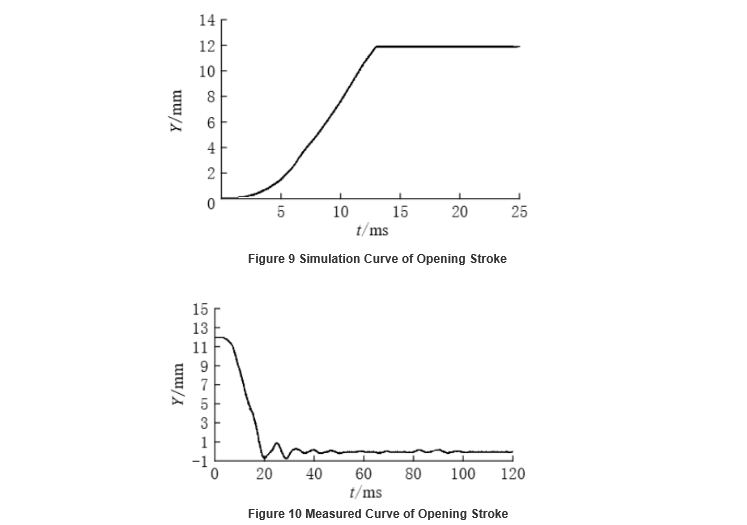
Električne in mehanične značilnosti neposredno delujočega mehanizma stalnega magnetnega so analizirane s kombinacijo simulacij Ansoft in dejanskih preskusov produktov, s poudarkom na značilnostih toka in hodnika zapiranja in odpiranja. Slika 5 prikazuje simulirano krivuljo toka zapiranja, z vrhunskim tokom 13,2 A. Slika 6 prikazuje osciloskopski meritve toka zapiranja, z merjenim vrhunskim tokom 14,2 A. Slika 7 prikazuje simulirano krivuljo hodnika zapiranja, z hitrostjo zapiranja (povprečna hitrost v zadnjih 6 mm pred zaprtjem kontakta) 0,8 m/s. Slika 8 prikazuje osciloskopsko meritve hitrosti zapiranja, ki je 0,75 m/s. Rezultati kažejo, da značilnosti mehanskega zapiranja oblikovanega neposredno delujočega mehanizma stalnega magnetnega za čvrsto izolirano glavno enoto z kolobarjem zadoščajo zahtevam za preklopnike, napaka med simulacijo in eksperimentalnimi rezultati pa je znotraj sprejemljivega obsega oblikovanja.
6 Zaključek
Ta članek je oblikoval neposredno delujoči mehanizem stalnega magnetnega za čvrsto izolirane glavne enote z kolobarjem. Značilnosti toka zapiranja in odpiranja ter mehanske značilnosti hodnika mehanizma so bile analizirane in primerjane z uporabo računalniške simulacije in dejanskih preskusov produktov. Rezultati kažejo, da ustanovljen dinamični karakteristični simulacijski model lahko služi kot teoretična osnova za praktično oblikovanje mehanizmov stalnega magnetnega. Neposredno delujoči mehanizem stalnega magnetnega je primern za uporabo v čvrsto izoliranih glavnih enotah z kolobarjem, z nizkim pogonskim tokom in odličnimi mehanskimi lastnostmi, kot so hitrosti zapiranja in odpiranja, ki popolnoma zadoščajo tehničnim zahtevam. Prinaša tudi tehnološko osnovo za prihodnji razvoj visokonapetostnih sinhronih preklopnikov z izbiranjem faze.










