
Dibeke ji bo xerîdarê ya herî zêde yên ji bo kurdistanên pêvajoyên çemberên sîsteman (RMUs) dijîn, mekanîkên jiyanmîna yekî yên tradyasyonî yên bi serpilîna tîrî û li serpilîna tîrî neyên dikarînin vegerastinên herî zêde yên pirziman ên perantiyên bixweber bikin. Bêlî, dizaynê jiyanmîna mekanîkî yên di vê amadeyê de hatî ye ji bo struktûra yekî û serpilîna tîrî. Her serpilîna tîrî yên serpilîna tîrî yên dîwarê û nîşankirina serpilîna tîrî yên RMU hatine lêserîkirin bi serpilîna tîrî yên jiyanmîna mekanîkî bi serpilîna tîrî yên însulasyon. Serpilîna tîrî yên riyakirina serpilîna tîrî û serpilîna tîrî yên jiyanmîna mekanîkî hatine lêserîkirin bi serpilîna tîrî yên drive shaft. Struktûra yekî yên jiyanmîna mekanîkî yên serpilîna tîrî û şemaya tîrî yên serpilîna tîrî yên însulasyon û RMU hatine nîşan kirin di Şekil 1 û Şekil 2 de.


2. Model Matematîkî yên Sîstemê Drive Circuit yên Jiyanmîna Mekanîkî
Dizaynê jiyanmîna mekanîkî yên serpilîna tîrî di vê amadeyê de li ser pîvanên jiyanmîna mekanîkî yên yek-stable state ve hatî ye. Li serpilîna tîrî û serpilîna tîrî yên jiyanmîna mekanîkî, metodê drive hatî ye ku kapasîtora qademe hatine lêserîkirin bi serpilîna tîrî yên jiyanmîna mekanîkî. Şekil 3 şemaya tîrî yên circuit hatî ye, ku C kapasîtora qademe yên jiyanmîna mekanîkî, R tîrî yên ekuivalenta resistance yên coil yên jiyanmîna mekanîkî, û L tîrî yên ekuivalenta inductance yên coil hatine nîşan kirin.

Xarakteristikên dinamîkî yên jiyanmîna mekanîkî yên yek-stable state systema tîrî yên differential equations (1) hatine hate:

ku i currenta opening û closing û currenta coil (A); uC voltageya bixwebera capacitor (V); R tîrî yên ekuivalenta coil (Ω); C kapasîtora capacitor (F); ψ magnetic flux linkage totali electromagnetic system (Wb); m equivalent massa moving parts referred to moving core (kg); x displacementa moving core (m); v velocitya moving core (m/s); Fx electromagnetic force acting on moving core (N); Ff counteracting force on moving core (N). Solving this system of equations yields the dynamic characteristics of the permanent magnet mechanism.

3. Ekuivalenta Counterforce
Counterforces sereka yên ring main unit's circuit breaker contact pressure of arc extinguishing chamber and opening spring force of permanent magnet mechanism. These counterforces are equivalently referred to the moving core of the permanent magnet mechanism. The arcing chamber has a contact opening distance of 9.5 mm and an over-travel of 2.5 mm, with a total mechanism stroke of 12 mm. The counterforces of the opening spring and contact spring are measured according to the motion stroke of the permanent magnet mechanism, and the counterforce curve is plotted based on specific data. The detailed counterforce equivalence points are shown in Table 1.

4 Establishing Simulation Model
The dynamic characteristics of the direct-acting permanent magnet mechanism are solved using the finite element method (FEM). The basic principle of FEM is to discretize the continuous solution domain into a finite number of elements interconnected at nodes. After individual element analysis, a global assembly is performed, and boundary conditions are applied, with the final solution obtained via computer computation. In this study, the Ansoft finite element simulation software is used to establish the simulation model of the permanent magnet mechanism, and material parameters of its components are set. The permanent magnet material is defined as NdFe35, and the yoke material as steel-1010.
Next, the coil parameters are assigned: charging voltage of the capacitor is 110 V, capacitance is 0.047 F, coil DC resistance is 5 Ω, number of turns is 500, and inductance is 0.0143 H. Since the direct-acting permanent magnet mechanism is of a single-stable type, the opening operation is driven by the opening spring force. Therefore, only a small reverse current is needed to generate a reverse magnetic flux to cancel the flux produced by the permanent magnet, enabling the mechanism to open under the spring's counterforce. To reduce the required reverse magnetic flux, after extensive simulation and testing, a 5 Ω DC resistor is added in series in the opening drive circuit.
Finally, surface and solid modeling and meshing are performed on the permanent magnet mechanism. A relatively dense mesh is applied to key magnetic components such as the moving core, magnetic end caps, yoke, and permanent magnet, while a coarser mesh is used for non-magnetic parts.
5 Analysis of Simulation and Experimental Results
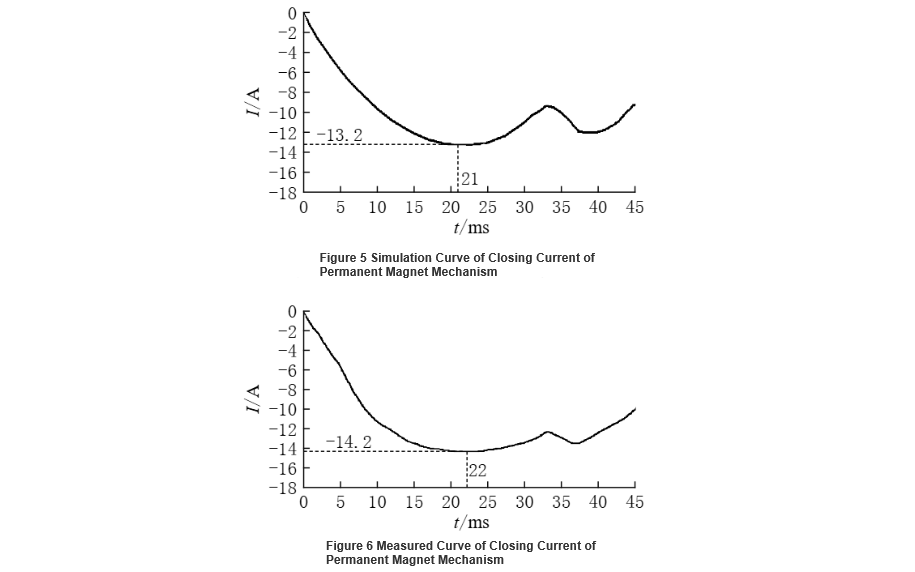
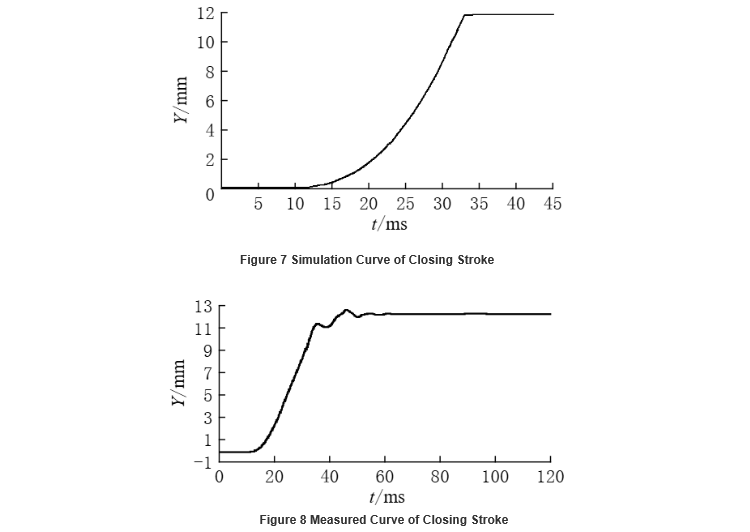
The electrical and mechanical characteristics of the direct-acting permanent magnet mechanism are analyzed by combining Ansoft simulations with actual product tests, focusing on the closing and opening current and stroke characteristics. Figure 5 shows the simulated closing current curve, with a peak current of 13.2 A. Figure 6 shows the oscilloscope-measured closing current, with a measured peak of 14.2 A. Figure 7 presents the simulated closing stroke curve, yielding a closing speed (average speed over the last 6 mm before contact closure) of 0.8 m/s. Figure 8 shows the oscilloscope-measured closing speed, which is 0.75 m/s. The results indicate that the closing mechanical characteristics of the designed direct-acting permanent magnet mechanism for the solid-insulated ring main unit meet the requirements of switchgear, and the error between simulation and experimental results falls within the acceptable design range.
6 Conclusion
This paper designed a direct-acting permanent magnet mechanism for solid-insulated ring main units. The closing and opening currents and mechanical stroke characteristics of the mechanism were analyzed and compared using computer simulation and actual product testing. The results show that the established dynamic characteristic simulation model can serve as a theoretical basis for practical permanent magnet mechanism design. The direct-acting permanent magnet mechanism is well-suited for use in solid-insulated ring main units, featuring low drive current and excellent mechanical performance such as closing and opening speeds, fully meeting technical requirements. It also provides a technical foundation for the future development of high-voltage synchronous phase selection switches.










