
ფართოვანად ხელმისაწვდომი მცირე ზომის ტვირთში ჩატარებული რგოლის მთავარი უნიტები (RMUs) დიდი მოთხოვნების გამო, ტრადიციული ერთფაზიანი პერმანენტური მაგნიტის მექანიზმები სამფაზიანი კავშირით აღარ შეძლებენ მოხვედრას მოწყობილობის ზოგიერთი მცირე ზომის მოთხოვნების მთლიანად. ამიტომ ამ კონტექსტში დიზაინირებული პერმანენტური მაგნიტის მექანიზმი მიიღებს სამფაზიან დამოუკიდებელ დირექტულ სტრუქტურას. თითოეული ფაზის დარჩენის დასახლების ერთეული ინტეგრირებულია RMU-ს სახელმძღვანელობის სხეულთან და დაკავშირებულია პერმანენტური მაგნიტის მექანიზმთან იზოლირებული სარტყელით ლინეიური კონფიგურაციით. გახსნის საწინააღმდეგო ძაბვის სპრინგი დათვლილია თითოეული ფაზის პერმანენტური მაგნიტის მექანიზმის მუშაობის ღირებულებაზე. ერთი დირექტული პერმანენტური მაგნიტის მექანიზმის მთლიანი სტრუქტურა ჩანს ფიგურა 1-ში და მისი მიმდევრობის სქემა სხვადასხვა ფიგურაში არის ნაჩვენები ფიგურა 2-ში.


2. პერმანენტური მაგნიტის მექანიზმის მუშაობის წრედის მათემატიკური მოდელი
აქ დიზაინირებული დირექტული პერმანენტური მაგნიტის მექანიზმი დაფუძნებულია ერთი სტაბილური მდგომარეობის პერმანენტური მაგნიტის მექანიზმის პრინციპზე. ის იყენებს მუშაობის მეთოდს, სადაც დატვირთული კონდენსატორი დარწმუნებით გამოქვეყნებს პერმანენტური მაგნიტის მექანიზმს. წრედის სქემა ჩანს ფიგურა 3-ში, სადაც C აღნიშნავს კონდენსატორს, რომელიც გამოიყენება პერმანენტური მაგნიტის მექანიზმის მუშაობისთვის, R აღნიშნავს პერმანენტური მაგნიტის მექანიზმის კოილის ექვივალენტურ რეზისტორს, ხოლო L აღნიშნავს კოილის ექვივალენტურ ინდუქციას.

ერთი სტაბილური პერმანენტური მაგნიტის მექანიზმის დინამიური ხარატერისტიკები აკმაყოფილებს დიფერენციალური განტოლებების სისტემას ნიშნული როგორც განტოლება (1):

სადაც i არის კოილის მიმდინარე ან დახურვის მიმდინარეობა (A); uC არის დატვირთული კონდენსატორის საწყისი ძაბვა (V); R არის კოილის ექვივალენტური რეზისტორი (Ω); C არის დატვირთული კონდენსატორის კაპაციტანცია (F); ψ არის ელექტრომაგნიტური სისტემის საერთო მაგნიტური ფლაქსის კავშირი (Wb); m არის მოძრავი ნაწილების ექვივალენტური მასა მოძრავი ბურთის მიმართ (kg); x არის მოძრავი ბურთის დეპლაცია (m); v არის მოძრავი ბურთის სიჩქარე (m/s); Fx არის მოძრავ ბურთზე მოქმედების ელექტრომაგნიტური ძალა (N); Ff არის მოძრავ ბურთზე მოქმედების საწინააღმდეგო ძალა (N). ამ განტოლებების გადაჭრით მიიღება პერმანენტური მაგნიტის მექანიზმის დინამიური ხარატერისტიკები.

3. საწინააღმდეგო ძალების ექვივალენტურობა
რგოლის მთავარი უნიტის დარჩენის კონტაქტის დარტყმის დასახელება და პერმანენტური მაგნიტის მექანიზმის გახსნის სპრინგის ძალა. ეს საწინააღმდეგო ძალები ექვივალენტურად ეხება პერმანენტური მაგნიტის მექანიზმის მოძრავ ბურთს. დარტყმის დასახლებაში კონტაქტის გახსნის მანძილი არის 9.5 mm და გადახვევის მანძილი არის 2.5 mm, მთლიანი მექანიზმის ხარისხი არის 12 mm. გახსნის სპრინგის და კონტაქტის სპრინგის საწინააღმდეგო ძალები გამოიზამება პერმანენტური მაგნიტის მექანიზმის მოძრაობის ხარისხის მიხედვით, და საწინააღმდეგო ძალის გრაფიკი არის დახაზული კონკრეტული მონაცემების მიხედვით. საწინააღმდეგო ძალის ექვივალენტური წერტილები ნაჩვენებია ცხრილში 1-ში.

4 სიმულაციის მოდელის შექმნა
დირექტული პერმანენტური მაგნიტის მექანიზმის დინამიური ხარატერისტიკები ამოიღება სასრული ელემენტების მეთოდის (FEM) გამოყენებით. FEM-ის ძირითადი პრინციპი არის უწყვეტი გადასახადის დომენის დისკრეტიზაცია სასრულ რაოდენობის ელემენტებად, რომლებიც ერთმანეთს კავშირდებიან კვადრატებში. ინდივიდუალური ელემენტების ანალიზის შემდეგ შეიძლება გლობალური ასამბელი და საზღვრების პირობების გამოყენება, საბოლოო ამოხსნა კომპიუტერული გამოთვლით მიიღება. ამ შესაძლებლობით Ansoft-ის სიმულაციის პროგრამის გამოყენებით შეიქმნება პერმანენტური მაგნიტის მექანიზმის სიმულაციის მოდელი და მისი კომპონენტების მასალის პარამეტრები დაიყენება. პერმანენტური მაგნიტის მასალა განსაზღვრულია NdFe35-ის რეგულირებით, ხოლო მაგნიტის რეზერვუარი მასალა რკინის-1010-ის რეგულირებით.
შემდეგ კოილის პარამეტრები არიან დამატებული: კონდენსატორის დატვირთვის ძაბვა არის 110 V, კაპაციტანცია არის 0.047 F, კოილის DC რეზისტორი არის 5 Ω, კრული რაოდენობა არის 500, ხოლო ინდუქცია არის 0.0143 H. რადგან დირექტული პერმანენტური მაგნიტის მექანიზმი არის ერთი სტაბილური ტიპი, გახსნის ოპერაცია მუშაობს გახსნის სპრინგის ძალით. ამიტომ საჭიროა მხოლოდ პატარა შეურაცხყოფის მიმდინარეობა შეურაცხყოფის მაგნიტური ფლაქსის შექმნა პერმანენტური მაგნიტის შექმნილი ფლაქსის დასაბრუნებლად, რათა მექანიზმი გახსნილი იყოს სპრინგის საწინააღმდეგო ძალით. შეურაცხყოფის მაგნიტური ფლაქსის შემცირებისთვის, ფართო სიმულაციისა და ტესტების შემდეგ, გახსნის მუშაობის წრედში დაემატება 5 Ω დირექტული რეზისტორი.
ბოლოს, პერმანენტური მაგნიტის მექანიზმის ზედაპირული და სოლიდური მოდელირება და მეშვეობით სამუშაო გახდება. შესაბამისად სამაგნიტო კომპონენტებზე, როგორიცაა მოძრავი ბურთი, მაგნიტური სათავეები, მაგნიტის რეზერვუარი და პერმანენტური მაგნიტი, გამოიყენება საშუალო სიმკვრივის გრიდი, ხოლო არასამაგნიტო ნაწილებზე გამოიყენება რადიკალურად სიმკვრივის გრიდი.
5 სიმულაციისა და ექსპერიმენტული შედეგების ანალიზი
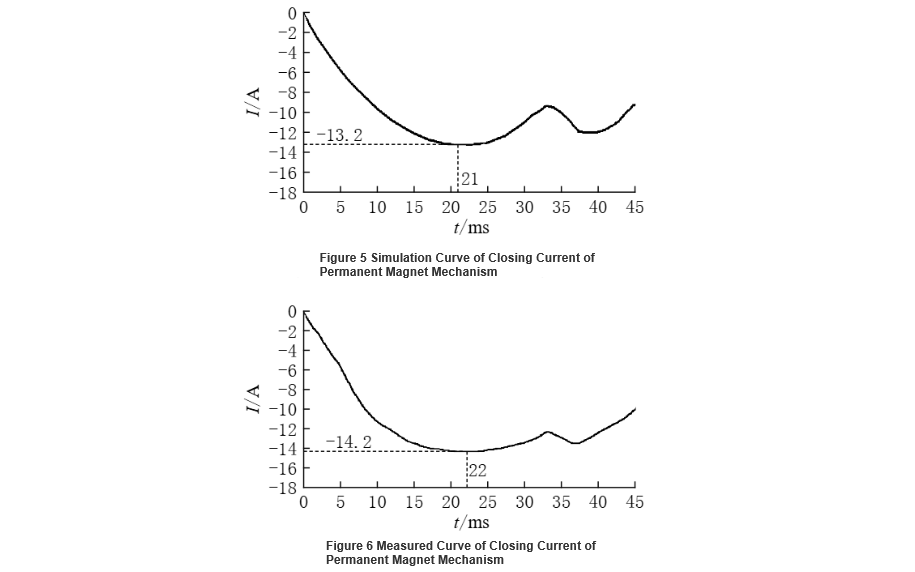
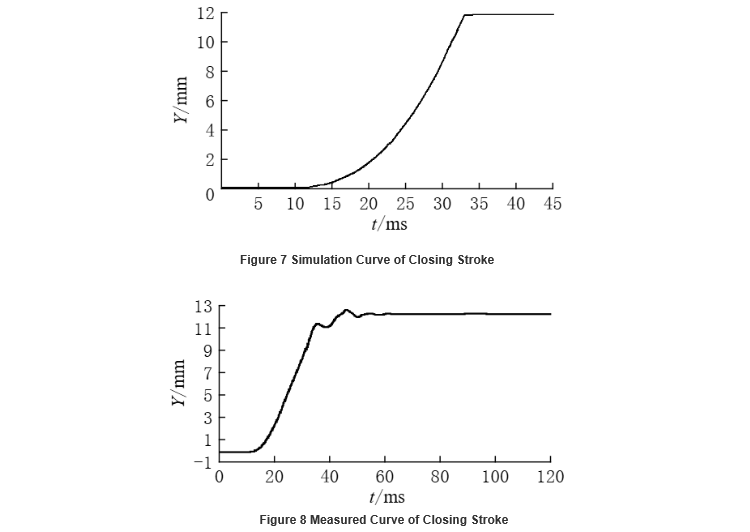
დირექტული პერმანენტური მაგნიტის მექანიზმის ელექტრომაგნიტური და მექანიკური ხარატერისტიკები ანალიზირდება Ansoft-ის სიმულაციების და ფაქტიური პროდუქტის ტესტების კომბინირებით, სადაც აქცენტი არის დახურვის და გახსნის მიმდინარეობაზე და ხარისხზე. ფიგურა 5 ჩვენებს სიმულირებულ დახურვის მიმდინარეობის გრაფიკს, რომლის პიკი არის 13.2 A. ფიგურა 6 ჩვენებს ოსილოგრაფით გაზომილ დახურვის მიმდინარეობას, რომლის გაზომილი პიკი არის 14.2 A. ფიგურა 7 ჩვენებს სიმულირებულ დახურვის ხარისხის გრაფიკს, რომელიც აძლევს დახურვის სიჩქარეს (ბოლო 6 mm-ის საშუალო სიჩქარე კონტაქტის დახურვის წინ) 0.8 m/s. ფიგურა 8 ჩვენებს ოსილოგრაფით გაზომილ დახურვის სიჩქარეს, რომელიც არის 0.75 m/s. შედეგები აჩვენებს, რომ დიზაინირებული დირექტული პერმანენტური მაგნიტის მექანიზმის დახურვის მექანიკური ხარატერისტიკები აკმაყოფილებს რგოლის მთავარი უნიტის ტექნიკურ მოთხოვნებს, და სიმულაციისა და ექსპერიმენტული შედეგების შეცდომა მოთავსდება დიზაინის ადვილად აღებულ შეზღუდვებში.
6 დასკვნა
ამ სტატიაში დიზაინირებული არის დირექტული პერმანენტური მაგნიტის მექანიზმი ფართოვანად ხელმისაწვდომი რგოლის მთავარი უნიტებისთვის. მექანიზმის დახურვის და გახსნის მიმდინარეობასა და მექანიკურ ხარისხს ანალიზირდება და შედარებულია კომპიუტერული სიმულაციისა და ფაქტიური პროდუქტის ტესტების საშუალებით. შედეგები ჩვენებს, რომ დამატებული დინამიური ხარატერისტიკების სიმულაციის მოდელი შეიძლება გამოიყენოს პრაქტიკული პერმანენტური მაგნიტის მექანიზმის დიზაინის თეორიულ საფუძველად. დირექტული პერმანენტური მაგნიტის მექანიზმი კარგად ემატება ფართოვანად ხელმისაწვდომი რგოლის მთავარი უნიტებისთვის, რომელიც ხელმისაწვდომია დარჩენის და გახსნის სიჩქარეებით, სრულიად აკმაყოფილებს ტექნიკურ მოთხოვნებს. ასევე ის არის ტექნიკური საფუძველი მომავალში დამატებული დარჩენის სინქრონული ფაზის შერჩევის კლაპანების განვითარებისთვის.










