
সলিড-ইনসুলেটেড রিং মেইন ইউনিট (RMUs) এর ক্ষুদ্রাকরণের উচ্চ চাহিদার কারণে, তিন-ফেজ ইন্টারলক সহ প্রাচীন একক স্থায়ী চুম্বক মেকানিজমগুলি সরঞ্জামের সমগ্র ক্ষুদ্রাকরণের দরকার পূরণ করতে পারে না। তাই, এই পরিস্থিতিতে ডিজাইন করা স্থায়ী চুম্বক মেকানিজম একটি তিন-ফেজ স্বাধীন সরাসরি-অভিনয় স্ট্রাকচার গ্রহণ করে। প্রতিটি ফেজের আর্ক নির্লিপ্ত কক্ষ ইউনিট অবকাঠামোর সঙ্গে RMU-এর ঢালাই শরীরের সঙ্গে একত্রে ঢালাই করা হয় এবং স্থায়ী চুম্বক মেকানিজমের সঙ্গে একটি অনুপ্রবেশী রড দিয়ে সরলরেখায় সংযুক্ত করা হয়। প্রতিটি ফেজের স্থায়ী চুম্বক মেকানিজমের ড্রাইভ শাফ্টে খোলা কাউন্টারফোর্স স্প্রিং স্থাপন করা হয়। একটি একক সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজমের সামগ্রিক স্ট্রাকচার চিত্র ১-এ দেখানো হল, এবং সলিড-ইনসুলেটেড RMU-তে এর সংযোজনের স্কিমেটিক ডায়াগ্রাম চিত্র ২-এ দেখানো হল।


২. স্থায়ী চুম্বক মেকানিজম ড্রাইভ সার্কিটের গাণিতিক মডেল
এখানে ডিজাইন করা সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজম একটি এক-স্থিতিশীল অবস্থার স্থায়ী চুম্বক মেকানিজমের নীতির উপর ভিত্তি করে তৈরি করা হয়েছে। এটি একটি চার্জড ক্যাপাসিটর থেকে ডিসচার্জ করে স্থায়ী চুম্বক মেকানিজম চালু করার একটি ড্রাইভ পদ্ধতি ব্যবহার করে। সার্কিট ডায়াগ্রাম চিত্র ৩-এ দেখানো হল, যেখানে C হল স্থায়ী চুম্বক মেকানিজম ড্রাইভ করার জন্য ব্যবহৃত ক্যাপাসিটর, R হল স্থায়ী চুম্বক মেকানিজমের কয়েলের সমতুল্য রোধ, এবং L হল কয়েলের সমতুল্য আবেশ।

এক-স্থিতিশীল স্থায়ী চুম্বক মেকানিজমের গতিশীল বৈশিষ্ট্যগুলি সমীকরণ (১) দ্বারা প্রদত্ত অন্তরজ সমীকরণ সিস্টেমকে সন্তুষ্ট করে:

যেখানে i হল কয়েল দিয়ে প্রবাহিত খোলা বা বন্ধ করার বিদ্যুৎ (A); uC হল চার্জড ক্যাপাসিটরের প্রাথমিক ভোল্টেজ (V); R হল কয়েলের সমতুল্য রোধ (Ω); C হল চার্জড ক্যাপাসিটরের ক্যাপাসিটেন্স (F); ψ হল ইলেকট্রোম্যাগনেটিক সিস্টেমের মোট চৌম্বক ফ্লাক্স লিঙ্কেজ (Wb); m হল চলমান অংশের সমতুল্য ভর যা চলমান কোরের সাথে সম্পর্কিত (kg); x হল চলমান কোরের স্থানান্তর (m); v হল চলমান কোরের বেগ (m/s); Fx হল চলমান কোরে ক্রিয়ারত ইলেকট্রোম্যাগনেটিক বল (N); Ff হল চলমান কোরে বিরোধী বল (N)। এই সমীকরণ সিস্টেমের সমাধান দ্বারা স্থায়ী চুম্বক মেকানিজমের গতিশীল বৈশিষ্ট্য পাওয়া যায়।

৩. বিরোধী বলের সমতুল্যতা
রিং মেইন ইউনিটের সার্কিট ব্রেকারের প্রধান বিরোধী বলগুলি হল আর্ক নির্লিপ্ত কক্ষের যোগাযোগ চাপ এবং স্থায়ী চুম্বক মেকানিজমের খোলা স্প্রিং বল। এই বিরোধী বলগুলি স্থায়ী চুম্বক মেকানিজমের চলমান কোরে সমতুল্য রূপে প্রতিফলিত করা হয়। আর্কিং কক্ষের যোগাযোগ খোলা দূরত্ব ৯.৫ mm এবং অতিরিক্ত দূরত্ব ২.৫ mm, মোট মেকানিজমের স্ট্রোক ১২ mm। খোলা স্প্রিং এবং যোগাযোগ স্প্রিং বল স্থায়ী চুম্বক মেকানিজমের গতি স্ট্রোক অনুযায়ী পরিমাপ করা হয়, এবং বিশেষ তথ্য অনুযায়ী বিরোধী বলের বক্ররেখা প্লট করা হয়। বিস্তারিত বিরোধী বলের সমতুল্যতা বিন্দুগুলি টেবিল ১-এ দেখানো হয়েছে।

৪. সিমুলেশন মডেল প্রতিষ্ঠা
সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজমের গতিশীল বৈশিষ্ট্যগুলি সসীম উপাদান পদ্ধতি (FEM) ব্যবহার করে সমাধান করা হয়। FEM-এর মৌলিক নীতি হল অবিচ্ছিন্ন সমাধান ডোমেইনকে সসীম সংখ্যক উপাদানে বিভক্ত করা, যারা নোডগুলির মাধ্যমে সংযুক্ত। একক উপাদান বিশ্লেষণের পর, একটি গ্লোবাল অ্যাসেম্বলি সংগঠিত করা হয়, এবং সীমা শর্ত প্রয়োগ করা হয়, এবং প্রতিটি সমাধান কম্পিউটার গণনার মাধ্যমে প্রাপ্ত হয়। এই অধ্যয়নে, Ansoft সসীম উপাদান সিমুলেশন সফ্টওয়্যার ব্যবহার করে স্থায়ী চুম্বক মেকানিজমের সিমুলেশন মডেল প্রতিষ্ঠা করা হয়, এবং তার উপাদানগুলির পদার্থ পরামিতি সেট করা হয়। স্থায়ী চুম্বক পদার্থ NdFe35 হিসাবে সংজ্ঞায়িত করা হয়, এবং যোগাযোগ পদার্থ স্টিল-1010 হিসাবে সংজ্ঞায়িত করা হয়।
পরবর্তীতে, কয়েল পরামিতি বরাদ্দ করা হয়: ক্যাপাসিটরের চার্জিং ভোল্টেজ ১১০ V, ক্যাপাসিটর ০.০৪৭ F, কয়েলের DC রোধ ৫ Ω, প্রতিটি কয়েলের প্রতিক্রিয়া ৫০০, এবং আবেশ ০.০১৪৩ H। যেহেতু সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজম একটি এক-স্থিতিশীল ধরনের, খোলা অপারেশন খোলা স্প্রিং বল দ্বারা চালিত হয়। তাই, স্থায়ী চুম্বক দ্বারা উৎপাদিত ফ্লাক্স বাতিল করার জন্য একটি বিপরীত চৌম্বক ফ্লাক্স উৎপাদনের জন্য একটি ছোট বিপরীত বিদ্যুৎ প্রয়োজন। বিপরীত চৌম্বক ফ্লাক্সের প্রয়োজন কমানোর জন্য, বিস্তৃত সিমুলেশন এবং পরীক্ষার পর, খোলা ড্রাইভ সার্কিটে ৫ Ω DC রেজিস্টর সিরিজে যুক্ত করা হয়।
শেষ পর্যন্ত, স্থায়ী চুম্বক মেকানিজমের উপর সারফেস এবং সলিড মডেলিং এবং মেশিং করা হয়। চলমান কোর, চুম্বক প্লাগ, যোগাযোগ, এবং স্থায়ী চুম্বক জোড়া মুখ্য চুম্বক উপাদানগুলির জন্য একটি সাপেক্ষভাবে ঘন মেশ প্রয়োগ করা হয়, অন্যদিকে অ-চুম্বক উপাদানগুলির জন্য একটি স্থূল মেশ ব্যবহার করা হয়।
৫. সিমুলেশন এবং পরীক্ষামূলক ফলাফলের বিশ্লেষণ
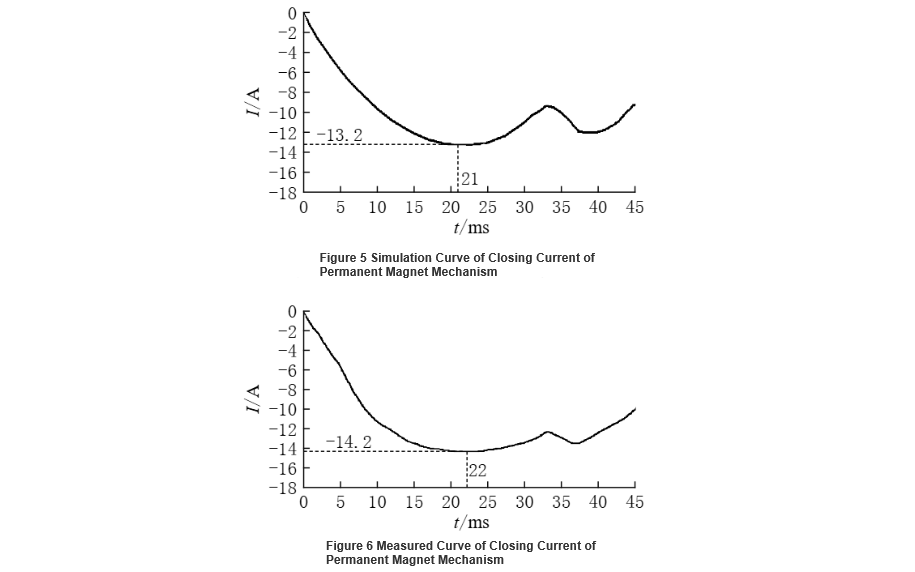
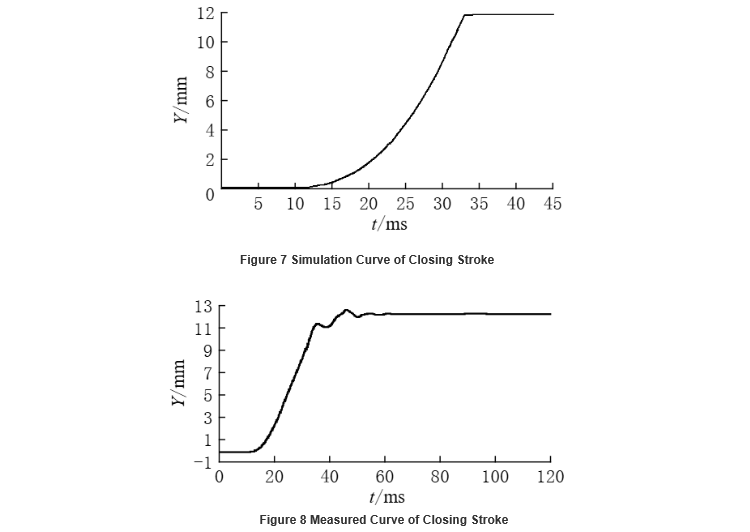
Ansoft সিমুলেশন এবং প্রকৃত পণ্য পরীক্ষার সমন্বয়ে সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজমের বৈদ্যুতিক এবং যান্ত্রিক বৈশিষ্ট্যগুলি বিশ্লেষণ করা হয়, যা মুখ্যত বন্ধ এবং খোলা বিদ্যুৎ এবং স্ট্রোক বৈশিষ্ট্যগুলি উপর ফোকাস করে। চিত্র ৫ সিমুলেটেড বন্ধ বিদ্যুৎ বক্ররেখা দেখায়, যার শীর্ষ বিদ্যুৎ ১৩.২ A। চিত্র ৬ অসিলোস্কোপ-মাপ বন্ধ বিদ্যুৎ দেখায়, যার মাপা শীর্ষ ১৪.২ A। চিত্র ৭ সিমুলেটেড বন্ধ স্ট্রোক বক্ররেখা দেখায়, যা বন্ধ গতি (যোগাযোগ বন্ধ হওয়ার শেষ ৬ mm-এর গড় গতি) ০.৮ m/s। চিত্র ৮ অসিলোস্কোপ-মাপ বন্ধ গতি দেখায়, যা ০.৭৫ m/s। ফলাফলগুলি দেখায় যে, ডিজাইন করা সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজমের বন্ধ যান্ত্রিক বৈশিষ্ট্যগুলি সলিড-ইনসুলেটেড রিং মেইন ইউনিটের জন্য সুইচগিয়ারের দরকার পূরণ করে, এবং সিমুলেশন এবং পরীক্ষামূলক ফলাফলের মধ্যে ত্রুটি ডিজাইনের গ্রহণযোগ্য পরিসীমার মধ্যে পড়ে।
৬. সারাংশ
এই প্রবন্ধে সলিড-ইনসুলেটেড রিং মেইন ইউনিটের জন্য একটি সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজম ডিজাইন করা হয়েছে। কম্পিউটার সিমুলেশন এবং প্রকৃত পণ্য পরীক্ষার সমন্বয়ে মেকানিজমের বন্ধ এবং খোলা বিদ্যুৎ এবং যান্ত্রিক স্ট্রোক বৈশিষ্ট্যগুলি বিশ্লেষণ এবং তুলনা করা হয়েছে। ফলাফলগুলি দেখায় যে, প্রতিষ্ঠিত গতিশীল বৈশিষ্ট্য সিমুলেশন মডেল প্রাকৃতিক স্থায়ী চুম্বক মেকানিজম ডিজাইনের জন্য একটি তাত্ত্বিক ভিত্তি হিসাবে কাজ করতে পারে। সরাসরি-অভিনয় স্থায়ী চুম্বক মেকানিজমটি সলিড-ইনসুলেটেড রিং মেইন ইউনিটে ব্যবহারের জন্য অনুপযুক্ত, যা কম ড্রাইভ বিদ্যুৎ এবং উত্তম যান্ত্রিক বৈশিষ্ট্য যেমন বন্ধ এবং খোলা গতি সহ, সম্পূর্ণরূপে প্রযুক্তিগত দরকার পূরণ করে। এটি ভবিষ্যতে উচ্চ-ভোল্টেজ সিঙ্ক্রোনাইজড ফেজ নির্বাচন সুইচের জন্য একটি প্রযুক্তিগত ভিত্তি প্রদান করে।










