
En raison de la forte demande de miniaturisation des cellules de jonction en anneau (RMU) à isolation solide, les mécanismes traditionnels à un seul aimant permanent avec verrouillage triphasé ne peuvent pas répondre aux exigences globales de miniaturisation de l'équipement. Par conséquent, le mécanisme à aimant permanent conçu dans ce contexte adopte une structure directe indépendante triphasée. Chaque unité de chambre d'extinction d'arc est coulée en une seule pièce avec le corps moulé du RMU et connectée au mécanisme à aimant permanent via une tige isolante en configuration linéaire. Le ressort de contre-force d'ouverture est positionné sur l'arbre de commande de chaque phase du mécanisme à aimant permanent. La structure globale d'un mécanisme direct à aimant permanent unique est présentée à la Figure 1, et son schéma de montage dans le RMU à isolation solide est illustré à la Figure 2.


2.Modèle mathématique du circuit de commande du mécanisme à aimant permanent
Le mécanisme direct à aimant permanent conçu ici est basé sur le principe d'un mécanisme à aimant permanent à un état stable unique. Il utilise une méthode de commande où un condensateur chargé décharge pour activer le mécanisme à aimant permanent. Le schéma du circuit est présenté à la Figure 3, où C représente le condensateur utilisé pour commander le mécanisme à aimant permanent, R désigne la résistance équivalente de la bobine du mécanisme à aimant permanent, et L indique l'inductance équivalente de la bobine.

Les caractéristiques dynamiques du mécanisme à aimant permanent à un état stable unique satisfont le système d'équations différentielles montré dans l'équation (1) :

où i est le courant d'ouverture ou de fermeture passant par la bobine (A); uC est la tension initiale du condensateur de charge (V); R est la résistance équivalente de la bobine (Ω); C est la capacité du condensateur de charge (F); ψ est le flux magnétique total du système électromagnétique (Wb); m est la masse équivalente des parties mobiles référées au noyau mobile (kg); x est le déplacement du noyau mobile (m); v est la vitesse du noyau mobile (m/s); Fx est la force électromagnétique agissant sur le noyau mobile (N); Ff est la force de contre-action sur le noyau mobile (N). La résolution de ce système d'équations donne les caractéristiques dynamiques du mécanisme à aimant permanent.

3.Équivalence de la force de contre-action
Les principales forces de contre-action dans le disjoncteur de la cellule de jonction en anneau comprennent la pression de contact de la chambre d'extinction d'arc et la force de ressort d'ouverture du mécanisme à aimant permanent. Ces forces de contre-action sont équivalentes au noyau mobile du mécanisme à aimant permanent. La chambre d'arc a une distance d'ouverture de contact de 9,5 mm et un dépassement de 2,5 mm, avec un parcours total du mécanisme de 12 mm. Les forces de ressort d'ouverture et de contact sont mesurées selon le parcours de mouvement du mécanisme à aimant permanent, et la courbe de force de contre-action est tracée sur la base de données spécifiques. Les points d'équivalence de force de contre-action détaillés sont présentés dans le Tableau 1.

4 Établissement du modèle de simulation
Les caractéristiques dynamiques du mécanisme direct à aimant permanent sont résolues en utilisant la méthode des éléments finis (MEF). Le principe de base de la MEF est de discrétiser le domaine de solution continu en un nombre fini d'éléments interconnectés par des nœuds. Après l'analyse individuelle des éléments, un assemblage global est effectué, et les conditions aux limites sont appliquées, la solution finale étant obtenue par calcul informatique. Dans cette étude, le logiciel de simulation par éléments finis Ansoft est utilisé pour établir le modèle de simulation du mécanisme à aimant permanent, et les paramètres de matériaux de ses composants sont définis. Le matériau de l'aimant permanent est défini comme NdFe35, et le matériau de l'entrefer comme acier-1010.
Ensuite, les paramètres de la bobine sont attribués : la tension de charge du condensateur est de 110 V, la capacité est de 0,047 F, la résistance CC de la bobine est de 5 Ω, le nombre de spires est de 500, et l'inductance est de 0,0143 H. Comme le mécanisme direct à aimant permanent est de type à un état stable unique, l'opération d'ouverture est entraînée par la force du ressort d'ouverture. Par conséquent, il suffit d'un petit courant inverse pour générer un flux magnétique inverse qui annule le flux produit par l'aimant permanent, permettant au mécanisme de s'ouvrir sous la force de contre-action du ressort. Pour réduire le flux magnétique inverse nécessaire, après de nombreuses simulations et tests, une résistance CC de 5 Ω est ajoutée en série dans le circuit de commande d'ouverture.
Enfin, la modélisation de surface et de volume ainsi que la maillage sont effectués sur le mécanisme à aimant permanent. Un maillage relativement dense est appliqué aux composants magnétiques clés tels que le noyau mobile, les capuchons magnétiques, l'entrefer et l'aimant permanent, tandis qu'un maillage plus grossier est utilisé pour les parties non magnétiques.
5 Analyse des résultats de simulation et d'expérimentation
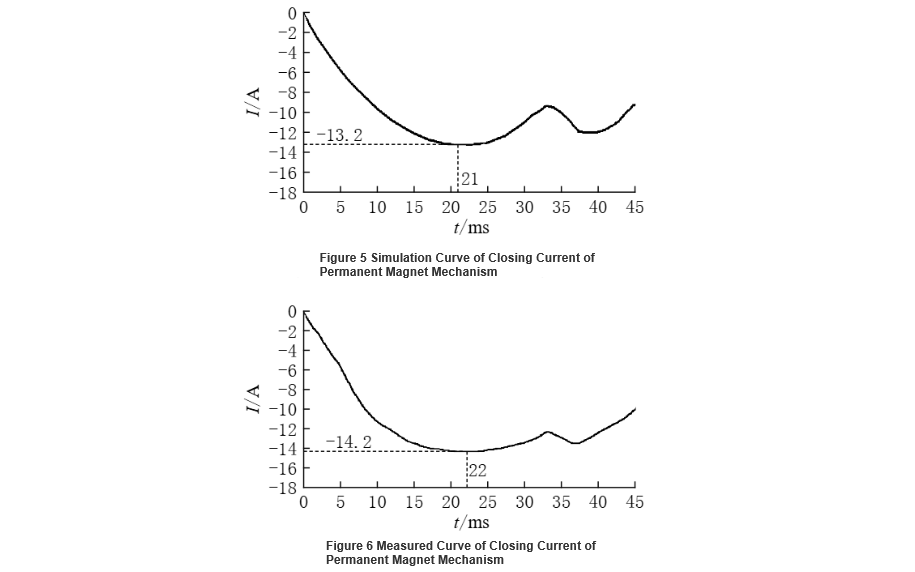
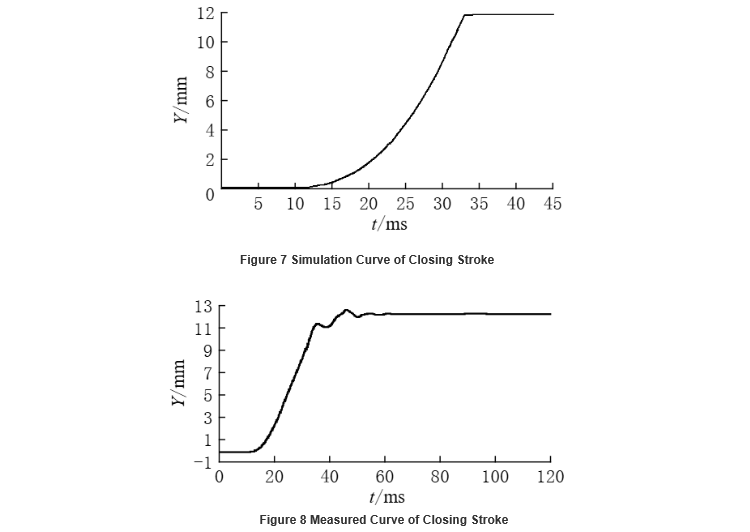
Les caractéristiques électriques et mécaniques du mécanisme direct à aimant permanent sont analysées en combinant les simulations Ansoft avec les tests de produits réels, en se concentrant sur les courants de fermeture et d'ouverture et les caractéristiques de parcours. La Figure 5 montre la courbe simulée du courant de fermeture, avec un courant de pointe de 13,2 A. La Figure 6 montre le courant de fermeture mesuré par oscilloscope, avec un pic mesuré de 14,2 A. La Figure 7 présente la courbe simulée du parcours de fermeture, donnant une vitesse de fermeture (vitesse moyenne sur les 6 derniers millimètres avant la fermeture du contact) de 0,8 m/s. La Figure 8 montre la vitesse de fermeture mesurée par oscilloscope, qui est de 0,75 m/s. Les résultats indiquent que les caractéristiques mécaniques de fermeture du mécanisme direct à aimant permanent conçu pour le RMU à isolation solide répondent aux exigences des appareils de commutation, et l'erreur entre les résultats de simulation et d'expérimentation est dans la plage acceptable de conception.
6 Conclusion
Cet article a conçu un mécanisme direct à aimant permanent pour les cellules de jonction en anneau à isolation solide. Les courants de fermeture et d'ouverture et les caractéristiques de parcours mécanique du mécanisme ont été analysés et comparés en utilisant la simulation par ordinateur et les tests de produits réels. Les résultats montrent que le modèle de simulation des caractéristiques dynamiques établi peut servir de base théorique pour la conception pratique du mécanisme à aimant permanent. Le mécanisme direct à aimant permanent est bien adapté pour l'utilisation dans les cellules de jonction en anneau à isolation solide, offrant un courant de commande faible et d'excellentes performances mécaniques telles que les vitesses de fermeture et d'ouverture, répondant pleinement aux exigences techniques. Il fournit également une base technique pour le développement futur des interrupteurs de sélection synchrone haute tension.










