
בשל המגמה להקטנת מימדים ביחידות טבעת מייניות מבודדות קשיחות (RMUs), מנגנונים מגנטיים קבועים מסורתיים עם נעילה של שלושה פאזה לא יכולים לעמוד בדרישות ההקטנה הכלליות של הציוד. לכן, המנגנון המגנטי הקבוע המתוכנן בהקשר זה אומץ מבנה עצמאי ישירות של שלושה פאזה. כל יחידת כיבוי קשת של פאזה אחת היא יציקה אחת עם גוף היציקה של RMU ומחוברת למנגנון המגנטי הקבוע באמצעות מוט מבודד בצורה ישרה. Sprint הנגד של פתיחה ממוקם על ציר הנעה של מנגנון המגנט הקבוע של כל פאזה. המבנה הכולל של מנגנון מגנט קבוע ישירות אחד מוצג בתרשים 1, ותרשים הסכימה של האספה שלו בתוך RMU מבודדת קשיח מוצג בתרשים 2.


2. דגם מתמטי של מעגל הנעה של מנגנון המגנט הקבוע
המנגנון המגנטי הקבוע הישר המתוכנן כאן מבוסס על עקרון מנגנון מגנט קבוע חד-יציב. הוא משתמש בשיטה של הנעה שבה קבל מוזן משחרר את המנגנון המגנטי הקבוע. סכימת המעגל מוצגת בתרשים 3, כאשר C מייצג את הקבל המשמש להנעה של מנגנון המגנט הקבוע, R מייצג את התנגדות השווה של סליל המנגנון המגנטי, ו-L מייצג את ההשראות השווה של הסליל.

מאפייני הדינמי של המנגנון המגנטי הקבוע החד-יציב מקיימים מערכת משוואות דיפרנציאליות המוצגת במשוואה (1):

כאשר i הוא זרם הפתיחה או הסגירה העובר דרך הסליל (A); uC הואряoltage ההתחלתי של הקבל המזין (V); R הוא התנגדות השווה של הסליל (Ω); C היא קיבול הקבל המזין (F); ψ הוא שטף המגנטי הכולל של המערכת האלקטרומגנטית (Wb); m הוא המסה השווה של החלקים הנעים המתייחסים ללב נעות (kg); x הוא הזזה של הלב הנע (m); v היא מהירות הלב הנע (m/s); Fx הוא כוח האלקטרומגנטי הפועל על הלב הנע (N); Ff הוא כוח הנגד הפועל על הלב הנע (N). פתרון מערכת המשוואות הזו נותן את מאפייני הדינמי של המנגנון המגנטי הקבוע.

3. שקילות כוחות נגד
הכוחות הנגד העיקריים במעגל הפסק של יחידה מיינית טבעת כוללים את לחץ הקשר של תא הכיבוי והכוח הנגד של Sprint הנפתח של המנגנון המגנטי הקבוע. כוחות אלה מתואמים באופן שוויוני ללב הנע של המנגנון המגנטי הקבוע. לתא הקשת יש מרחק פתיחה של קשר של 9.5 מ"מ ומעבר של 2.5 מ"מ, עם מהלך מנגנון כולל של 12 מ"מ. כוחות הנגד של Sprint הנפתח ו-Sprint הקשר נמדדים לפי מהלך התנועה של המנגנון המגנטי הקבוע, ועקום כוח הנגד מוערך על בסיס נתונים ספציפיים. נקודות השקילות של כוח הנגד מפורטות בטבלה 1.

4 הקמת דגם סימולציה
מאפייני הדינמי של המנגנון המגנטי הקבוע הישר נפתרים באמצעות שיטת אלמנטים סופיים (FEM). העיקרון הבסיסי של FEM הוא לחלק את תחום הפתרון החציף למספר סופי של אלמנטים המחוברים בעפרונות. לאחר ניתוח אלמנט בודד, מתבצעה אסיפה גלובלית, ומפעילים תנאי גבול, עם הפתרון הסופי המתקבל באמצעות חישוב מחשב. במחקר זה, משתמשים בתוכנת סימולציה Ansoft כדי להקים דגם סימולציה של המנגנון המגנטי הקבוע, ומגדירים פרמטרי חומרים עבור רכיביו. חומר המגנט הקבוע מוגדר כ-NdFe35, וחומר ה-Yoke כ-steel-1010.
לאחר מכן, מוקצבים פרמטרי הסליל:ряoltage טעינה של הקבל היא 110 V, קיבול הוא 0.047 F, התנגדות DC של הסליל היא 5 Ω, מספר הסיבובים הוא 500, וההשראות היא 0.0143 H. מכיוון שהמנגנון המגנטי הקבוע הישר הוא חד-יציב, פעולת הפתיחה מונעת על ידי כוח Sprint הנפתח. לכן, נדרש רק זרם ניגוד קטן כדי ליצור שטף מגנטי ניגודי כדי לבטל את השטף שנוצר על ידי המגנט הקבוע, ולאפשר למנגנון לפתוח תחת כוח הנגד של Sprint. כדי להפחית את השטף המגנטי הנגדי הנדרש, לאחר סימולציות ובדיקות רבות, נוסף נגד DC של 5 Ω בטור במעגל הנעה של הפתיחה.
לבסוף, מתבצע מודל פני שטח ומלא ורשת על המנגנון המגנטי הקבוע. רשת צפופה יחסית מופעלת על רכיבים מגנטיים מרכזיים כגון הלב הנע, כיפות מגנטיות, Yoke ומגנט קבוע, בעוד שמופעלת רשת גסה יותר עבור חלקים לא מגנטיים.
5 ניתוח תוצאות הסימולציה והניסויים
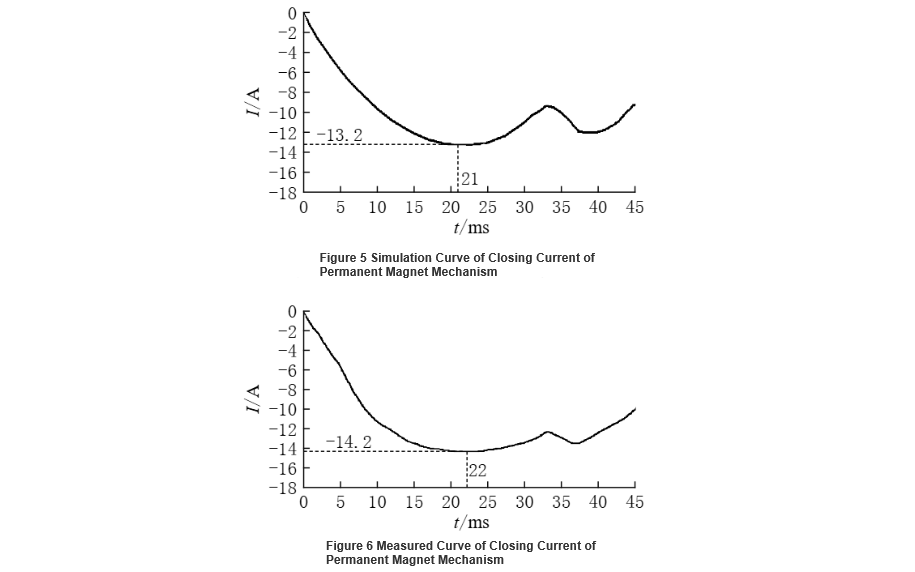
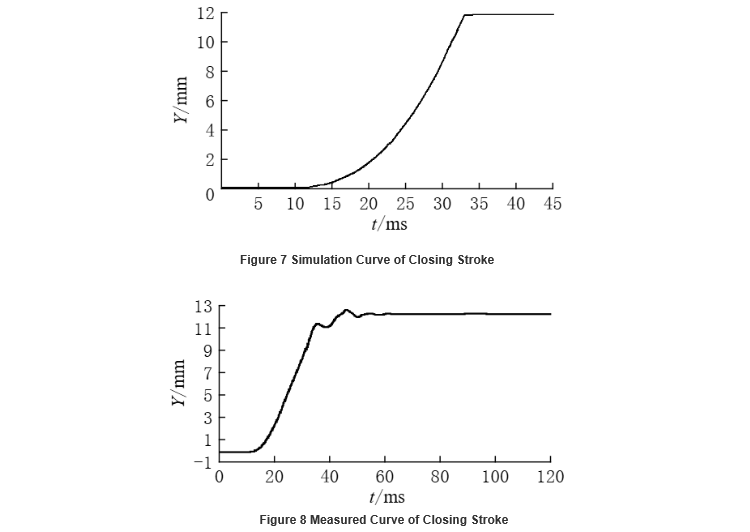
מאפייני החשמל והמכניקה של המנגנון המגנטי הקבוע הישר מנתחים באמצעות שילוב סימולציות Ansoft עם מבחנים של מוצר אמיתי, תוך התמקדות במאפייני הזרם והמהלך של הסגירה והפתיחה. תרשים 5 מציג את עקומת הזרם של הסגירה המוסמכת, עם זרם פסגה של 13.2 A. תרשים 6 מציג את הזרם של הסגירה הנמדד באמצעות אוסצילוסקופ, עם מדידה של זרם פסגה של 14.2 A. תרשים 7 מציג את עקומת המהלך של הסגירה המוסמכת, עם מהירות סגירה (מהירות ממוצעת בשלושת המ"מ האחרונים לפני סגירת הקשר) של 0.8 m/s. תרשים 8 מציג את מהירות הסגירה הנמדדת באמצעות אוסצילוסקופ, שהיא 0.75 m/s. התוצאות מצביעות על כך שמאפייני המכנית של הסגירה של המנגנון המגנטי הקבוע הישר המתוכנן ליחידה מיינית טבעת מבודדת קשיח מקיים את הדרישות של התקני המתגים, והשגיאה בין תוצאות הסימולציה למבחנים נמצאת בתחום המותר לעיצוב.
6 מסקנה
בעaper זה תוכנן מנגנון מגנט קבוע ישירות ליחידות מייניות טבעת מבודדות קשיחות. מאפייני הזרם והמהלך המכניים של הסגירה והפתיחה של המנגנון נalyzed ונשוו באמצעות סימולציה מחשב ומבחן מוצר אמיתי. התוצאות מצביעות על כך שהדגם הסימולטיבי של מאפייני הדינמי שהוקם יכול לשמש כבסיס תיאורי לעיצוב מנגנון מגנט קבוע מעשי. המנגנון המגנטי הקבוע הישר מתאים היטב לשימוש ביחידות מייניות טבעת מבודדות קשיחות, וכולל זרם הנעה נמוך וביצועים מכניים מצוינים כמו מהירות סגירה ופתיחה, שמקיימות את הדרישות הטכניות. הוא גם מספק בסיס טכנולוגי לפיתוח עתידי של מתגים בחירה של פאזה סינכרונית בעומסים גבוהים.










