
Pro la alta demando pri miniaturigo en solid-insulitaj ringaj ĉefstacioj (RMU), tradiciaj unuopaj permanenta magnet-mekanismoj kun tri-fazaj interligiloj ne povas kontentigi la tutecan postulon de miniaturigo de la ekipaĵo. Tial, la permanenta magnet-mekanismo dizajnita en ĉi tiu kunteksto adoptas tri-fazan sendependan rekta-ago strukturon. La arkmalŝarĝanta ĉambro-unuo de ĉiu fazo estas integralte fundita kun la fundado de la RMU kaj ligita al la permanenta magnet-mekanismo per izolanta bastono en lineara konfiguro. La malferma kontraŭforta spiralo situas sur la movigakso de la permanenta magnet-mekanismo de ĉiu fazo. La tuta strukturo de unu rekta-ago permanenta magnet-mekanismo estas montrita en Figuro 1, kaj sia montado skemo en la solid-insulita RMU estas prezentita en Figuro 2.


2. Matematika Modelo de la Permanenta Magnet-Mekanismo Drive Circuit
La rekta-ago permanenta magnet-mekanismo dizajnita ĉi tie bazas sin sur la principo de unu-stabila stato permanenta magnet-mekanismo. Ĝi uzas drivmetodon, kie ŝargita kondensatoro malŝargas por aktivi la permanenta magnet-mekanismo. La cirkvito-diagramo estas montrita en Figuro 3, kie C reprezentas la kondensatoron uzitan por drivi la permanenta magnet-mekanismo, R signifas la ekvivalentan rezistancon de la spiralo de la permanenta magnet-mekanismo, kaj L indikas la ekvivalentan induktancon de la spiralo.

La dinamikaj karakterizaĵoj de la unu-stabila permanenta magnet-mekanismo kontentigas la sistemon de diferencialaj ekvacioj montrita en Ekvacio (1):

kie i estas la malferma aŭ ferma koranto tra la spiralo (A); uC estas la komenca voltajo de la ŝarganta kondensatoro (V); R estas la ekvivalenta rezisto de la spiralo (Ω); C estas la kapaciteco de la ŝarganta kondensatoro (F); ψ estas la tuta magnet-flux-ligo de la elektromagnetika sistemo (Wb); m estas la ekvivalenta maso de la movantaj partoj referencita al la movanta kerno (kg); x estas la dislokado de la movanta kerno (m); v estas la rapideco de la movanta kerno (m/s); Fx estas la elektromagnetika forto efektanta sur la movanta kerno (N); Ff estas la kontraŭforo sur la movanta kerno (N). Solvante ĉi tiun sistemon de ekvacioj oni akiras la dinamikajn karakterizaĵojn de la permanenta magnet-mekanismo.

3. Kontraŭforta Ekvivalenteco
La ĉefaj kontraŭfortoj en la cirkvit-brekejo de la ringa ĉefstacio inkluzivas la kontaktan preson de la arkmalŝarĝanta ĉambro kaj la malferman spiralan forton de la permanenta magnet-mekanismo. Ĉi tiuj kontraŭfortoj estas ekvivalente referencitaj al la movanta kerno de la permanenta magnet-mekanismo. La arkmalŝarĝanta ĉambro havas kontaktan malferman distancon de 9,5 mm kaj supermarŝon de 2,5 mm, kun totala mekanisma marŝo de 12 mm. La kontraŭfortoj de la malferma spiralo kaj la kontakta spiralo estas mezuritaj laŭ la mova marŝo de la permanenta magnet-mekanismo, kaj la kontraŭforta kurbo estas desegnita laŭ specifaj datumoj. La detalaj kontraŭforta ekvivalenteco punktoj estas montritaj en Tablo 1.

4 Simula Modela Establivo
La dinamikaj karakterizaĵoj de la rekta-ago permanenta magnet-mekanismo solvas per la finhava elementa metodo (FEM). La baza principo de FEM estas diskretigi la kontinuan solvdomajnon en finhavan nombron da elementoj interligitaj je nodoj. Post individua elementanalizo, faras globan assembladon, kaj aplikas limkondiĉojn, kun la fina solvo akirita per komputila komputado. En ĉi tiu studo, la Ansoft finhava elementa simula programaro estas uzata por establi la simulmodelon de la permanenta magnet-mekanismo, kaj materialparametroj de ĝiaj komponantoj estas agorditaj. La permanenta magnetmaterialo estas difinita kiel NdFe35, kaj la jukmaterialo kiel acier-1010.
Sekve, asignas la spiro-parametrojn: ŝarganta voltajo de la kondensatoro estas 110 V, kapaciteco estas 0,047 F, spirona DC rezisto estas 5 Ω, nombro de turnoj estas 500, kaj indukto estas 0,0143 H. Ĉar la rekta-ago permanenta magnet-mekanismo estas de unu-stabila tipo, la malferma operacio estas drivita per la malferma spirala forto. Tial, nur malgranda inversa koranto estas bezonata por generi inversan magnet-fluxon por nuligi la fluxon produktitan de la permanenta magnet, permesante ke la mekanismo malfermiĝu sub la spirala kontraŭforto. Por redukti la bezonatan inversan magnet-fluxon, post ampleksa simulado kaj testado, 5 Ω DC rezistoro estas aldonita serio en la malferma drive circuit.
Fine, surfaca kaj solida modelado kaj mallumado estas faritaj sur la permanenta magnet-mekanismo. Relativan dense malluman gridon aplikas al klavaj magnetaj komponantoj kiel la movanta kerno, magnetaj kapoj, juko, kaj permanenta magnet, dum pli gruza mallumo estas uzata por nemagnetaj partoj.
5 Analizo de Simula kaj Eksperimenta Resultoj
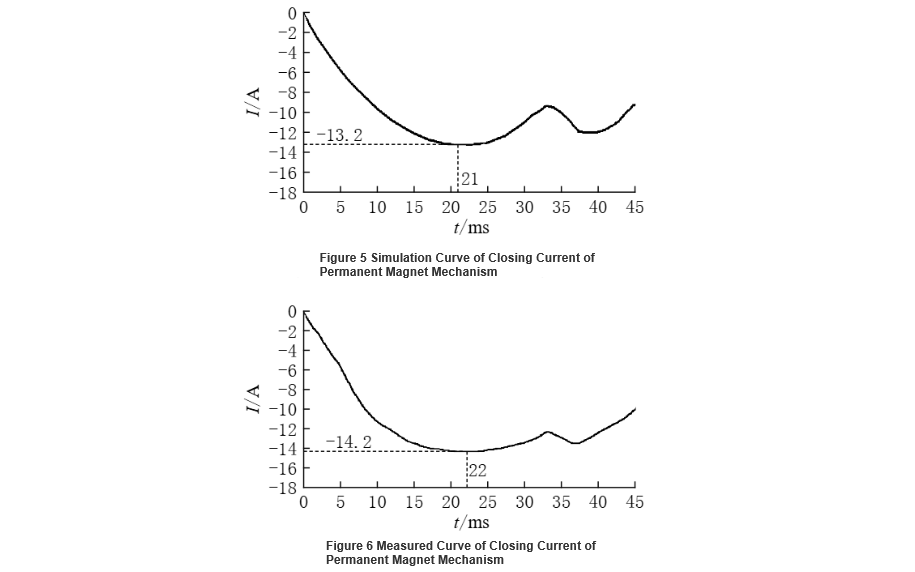
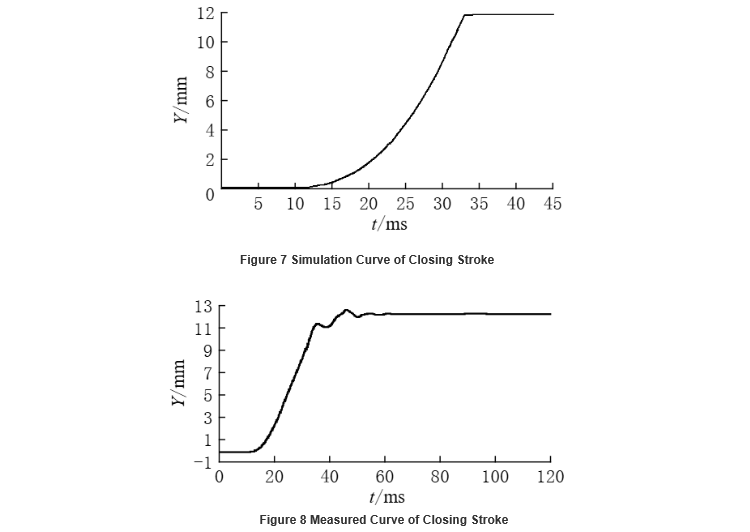
La elektraj kaj mekanikaj karakterizaĵoj de la rekta-ago permanenta magnet-mekanismo analizas kombinante Ansoft-simuladojn kun realaj produktestoj, fokusante sur la ferma kaj malferma koranto kaj marŝokarakterizaĵoj. Figuro 5 montras la simulitan fermantan koranton, kun maksimuma koranto de 13,2 A. Figuro 6 montras la osciloskop-mezan fermantan koranton, kun mezurita maksimumo de 14,2 A. Figuro 7 prezentas la simulitan fermantan marŝkurbon, donante fermantan rapidon (meza rapido dum la lastaj 6 mm antaŭ kontaktfermo) de 0,8 m/s. Figuro 8 montras la osciloskop-mezan fermantan rapidon, kiu estas 0,75 m/s. La resultoj indikas, ke la fermantaj mekanikaj karakterizaĵoj de la dizajnita rekta-ago permanenta magnet-mekanismo por la solid-insulita ringa ĉefstacio kontentigas la postulojn de switchgear, kaj la eraro inter simulado kaj eksperimenta resulto kuŝas en la akceptebla dezainintervalo.
6 Konkludo
Ĉi tiu artikolo dizajnis rekta-ago permanenta magnet-mekanismo por solid-insulitaj ringaj ĉefstacioj. La fermantaj kaj malfermantaj korantoj kaj mekanikaj marŝokarakterizaĵoj de la mekanismo estis analizitaj kaj komparitaj per komputila simulado kaj reala produktesto. La resultoj montras, ke la starigita dinamika karakterizaĵo simulmodelo povas servi kiel teoria bazo por praktika permanenta magnet-mekanismo dizajno. La rekta-ago permanenta magnet-mekanismo taŭgas bone por uzo en solid-insulitaj ringaj ĉefstacioj, havante malaltan drivkoranton kaj excelan mekanikan performon kiel fermanta kaj malfermanta rapidoj, plene kontentigante teknikajn postulojn. Ĝi ankaŭ provizas teknikan bazon por la estonteca evoluo de alta-voltaja sinkrona faz-selekta brekejo.










