
ठोस-आइसुलेटेड रिंग मेन युनिट (RMU) में मिनीटराइजेशन की उच्च मांग के कारण, प्रत्येक फेज में तीन-फेज इंटरलॉकिंग साथ युक्त पारंपरिक एकल स्थायी चुम्बकीय मेकेनिज्म सामग्री के छोटे होने की कुल आवश्यकता को पूरा नहीं कर सकते। इसलिए, यहाँ डिजाइन किया गया स्थायी चुम्बकीय मेकेनिज्म तीन-फेज स्वतंत्र सीधे-कार्यकारी संरचना का उपयोग करता है। प्रत्येक फेज की आर्क विलुप्ति चेम्बर यूनिट RMU के ढालन शरीर के साथ एकीकृत ढाली जाती है और एक रेखीय व्यवस्था में एक अपरिचालक छड़ी के माध्यम से स्थायी चुम्बकीय मेकेनिज्म से जुड़ी होती है। प्रत्येक फेज के स्थायी चुम्बकीय मेकेनिज्म के ड्राइव शाफ्ट पर खुलने के लिए विरोधी बल स्प्रिंग स्थित होती है। एकल सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म की समग्र संरचना चित्र 1 में दिखाई गई है, और इसका ठोस-आइसुलेटेड RMU के भीतर असेंबली योजनात्मक आरेख चित्र 2 में दिखाया गया है।


2. स्थायी चुम्बकीय मेकेनिज्म ड्राइव सर्किट का गणितीय मॉडल
यहाँ डिजाइन किया गया सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म एकल-स्थिरावस्था स्थायी चुम्बकीय मेकेनिज्म के सिद्धांत पर आधारित है। इसमें एक चालित कैपेसिटर का उपयोग करके स्थायी चुम्बकीय मेकेनिज्म को चालित करने की विधि का उपयोग किया जाता है। सर्किट आरेख चित्र 3 में दिखाया गया है, जहाँ C स्थायी चुम्बकीय मेकेनिज्म को चालित करने के लिए उपयोग किया जाने वाला कैपेसिटर, R स्थायी चुम्बकीय मेकेनिज्म के कोइल का तुल्य प्रतिरोध, और L कोइल का तुल्य इंडक्टेंस दर्शाता है।

एकल-स्थिर स्थायी चुम्बकीय मेकेनिज्म की गतिशील विशेषताएँ समीकरण (1) में दिखाए गए अंतर समीकरणों के प्रणाली को संतुष्ट करती हैं:

जहाँ i कोइल के माध्यम से ओपनिंग या क्लोजिंग करंट (A) है; uC चार्जिंग कैपेसिटर का प्रारंभिक वोल्टेज (V) है; R कोइल का तुल्य प्रतिरोध (Ω) है; C चार्जिंग कैपेसिटर की क्षमता (F) है; ψ इलेक्ट्रोमैग्नेटिक सिस्टम का कुल चुम्बकीय फ्लक्स लिंकेज (Wb) है; m चल भागों का चल नाभिक के संदर्भ में तुल्य द्रव्यमान (kg) है; x चल नाभिक का विस्थापन (m) है; v चल नाभिक का वेग (m/s) है; Fx चल नाभिक पर कार्यरत इलेक्ट्रोमैग्नेटिक बल (N) है; Ff चल नाभिक पर विरोधी बल (N) है। इस समीकरणों के प्रणाली को हल करने से स्थायी चुम्बकीय मेकेनिज्म की गतिशील विशेषताएँ प्राप्त होती हैं।

3. विरोधी बल की समतुल्यता
रिंग मेन युनिट के सर्किट ब्रेकर में मुख्य विरोधी बलों में आर्क विलुप्ति चेम्बर का संपर्क दबाव और स्थायी चुम्बकीय मेकेनिज्म का खुलने का स्प्रिंग बल शामिल है। ये विरोधी बल स्थायी चुम्बकीय मेकेनिज्म के चल नाभिक पर समतुल्य रूप से संदर्भित होते हैं। आर्किंग चेम्बर में संपर्क खुलने की दूरी 9.5 mm और ओवर-ट्रैवल 2.5 mm है, और कुल मेकेनिज्म की दूरी 12 mm है। खुलने के स्प्रिंग और संपर्क स्प्रिंग के विरोधी बल स्थायी चुम्बकीय मेकेनिज्म के गति दौरान मापे जाते हैं, और विशिष्ट डेटा के आधार पर विरोधी बल की वक्र खींची जाती है। विस्तृत विरोधी बल समतुल्यता बिंदु तालिका 1 में दिखाए गए हैं।

4 सिमुलेशन मॉडल स्थापना
सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म की गतिशील विशेषताओं को सीमित तत्व विधि (FEM) का उपयोग करके हल किया जाता है। FEM का मूल सिद्धांत निरंतर समाधान क्षेत्र को सीमित संख्या में तत्वों में विभाजित करना है, जो नोडों पर जुड़े होते हैं। व्यक्तिगत तत्व विश्लेषण के बाद, वैश्विक संग्रह किया जाता है, और सीमा स्थितियाँ लागू की जाती हैं, और अंतिम समाधान कंप्यूटर के माध्यम से प्राप्त किया जाता है। इस अध्ययन में, Ansoft सीमित तत्व सिमुलेशन सॉफ्टवेयर का उपयोग स्थायी चुम्बकीय मेकेनिज्म के सिमुलेशन मॉडल को स्थापित करने के लिए किया गया है, और इसके घटकों के सामग्री पैरामीटर सेट किए गए हैं। स्थायी चुम्बक सामग्री NdFe35 और योक सामग्री स्टील-1010 के रूप में परिभाषित की गई है।
अगला, कोइल पैरामीटर निर्धारित किए जाते हैं: कैपेसिटर का चार्जिंग वोल्टेज 110 V, कैपेसिटन्स 0.047 F, कोइल DC प्रतिरोध 5 Ω, चक्करों की संख्या 500, और इंडक्टेंस 0.0143 H है। चूंकि सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म एकल-स्थिर प्रकार का है, खुलने की क्रिया स्प्रिंग बल द्वारा चालित होती है। इसलिए, चुम्बकीय मेकेनिज्म द्वारा उत्पन्न चुम्बकीय फ्लक्स को रद्द करने के लिए एक छोटा विपरीत धारा की आवश्यकता होती है, जिससे मेकेनिज्म स्प्रिंग के विरोधी बल के तहत खुल सके। आवश्यक विपरीत चुम्बकीय फ्लक्स को कम करने के लिए, व्यापक सिमुलेशन और परीक्षण के बाद, खुलने के ड्राइव सर्किट में 5 Ω DC प्रतिरोधक को श्रृंखला में जोड़ा गया है।
अंत में, स्थायी चुम्बकीय मेकेनिज्म पर सतह और ठोस मॉडलिंग और मेशिंग की जाती है। चल नाभिक, चुम्बकीय अंतिम कप, योक, और स्थायी चुम्बक जैसे महत्वपूर्ण चुम्बकीय घटकों पर एक अपेक्षाकृत सघन मेश लगाया जाता है, जबकि गैर-चुम्बकीय भागों पर एक अधिक बड़ा मेश उपयोग किया जाता है।
5 सिमुलेशन और प्रयोगात्मक परिणामों का विश्लेषण
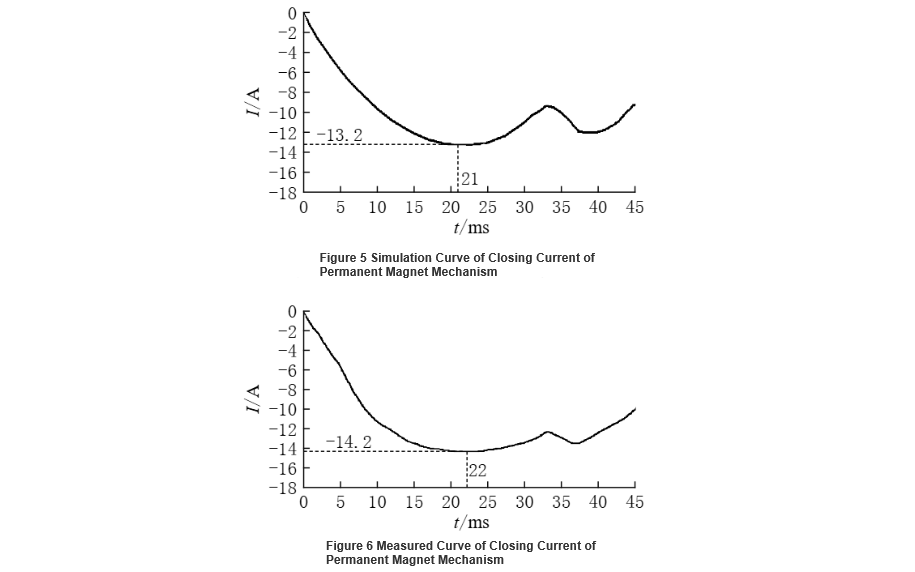
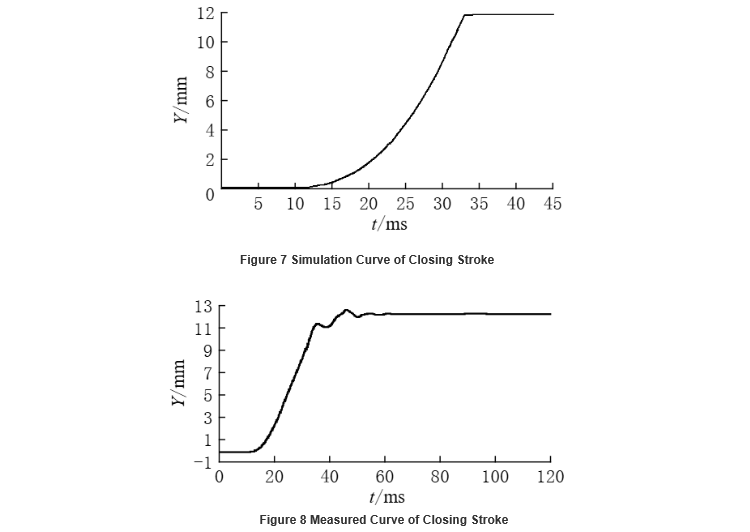
सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म की विद्युतीय और यांत्रिक विशेषताओं का विश्लेषण Ansoft सिमुलेशन और वास्तविक उत्पाद परीक्षणों के संयोजन से किया गया है, जो खुलने और बंद करने की धारा और स्ट्रोक विशेषताओं पर केंद्रित है। चित्र 5 में सिमुलेटेड बंद करने की धारा वक्र दिखाई गई है, जिसका शिखर धारा 13.2 A है। चित्र 6 में ओसिलोस्कोप द्वारा मापी गई बंद करने की धारा दिखाई गई है, जिसकी मापी गई शिखर धारा 14.2 A है। चित्र 7 में सिमुलेटेड बंद करने की स्ट्रोक वक्र दिखाई गई है, जिससे बंद करने की गति (संपर्क बंद होने से पहले के अंतिम 6 mm के औसत गति) 0.8 m/s प्राप्त होती है। चित्र 8 में ओसिलोस्कोप द्वारा मापी गई बंद करने की गति दिखाई गई है, जो 0.75 m/s है। परिणाम दर्शाते हैं कि ठोस-आइसुलेटेड रिंग मेन युनिट के लिए डिजाइन किए गए सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म की बंद करने की यांत्रिक विशेषताएँ स्विचगियर की आवश्यकताओं को पूरा करती हैं, और सिमुलेशन और प्रयोगात्मक परिणामों के बीच का त्रुटि स्वीकार्य डिजाइन परिसर के भीतर आता है।
6 निष्कर्ष
इस लेख में ठोस-आइसुलेटेड रिंग मेन युनिट के लिए एक सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म का डिजाइन किया गया है। मेकेनिज्म की बंद करने और खुलने की धारा और यांत्रिक स्ट्रोक विशेषताओं का विश्लेषण और तुलना कंप्यूटर सिमुलेशन और वास्तविक उत्पाद परीक्षणों का उपयोग करके किया गया है। परिणाम दर्शाते हैं कि स्थापित गतिशील विशेषताओं का सिमुलेशन मॉडल व्यावहारिक स्थायी चुम्बकीय मेकेनिज्म डिजाइन के लिए सैद्धांतिक आधार के रूप में काम कर सकता है। सीधे-कार्यकारी स्थायी चुम्बकीय मेकेनिज्म ठोस-आइसुलेटेड रिंग मेन युनिट के लिए उपयुक्त है, जिसमें कम चालक धारा और बंद करने और खुलने की गति जैसी उत्कृष्ट यांत्रिक प्रदर्शन शामिल है, जो पूरी तरह से तकनीकी आवश्यकताओं को पूरा करता है। यह उच्च वोल्टेज संकेत चयन स्विचों के भावी विकास के लिए भी तकनीकी आधार प्रदान करता है।










