
Vzhledem k vysoké poptávce po miniaturizaci pevně izolovaných okruhových hlavních jednotek (RMU) již tradiční trvalomagnetické mechanismy s třífázovým zapínáním nemohou splnit celkové požadavky na miniaturizaci zařízení. Proto byl v tomto kontextu navržen trvalomagnetický mechanismus s nezávislou třífázovou přímou působící strukturou. Každá fáze jednotky pro uhasení oblouku je integrována s odlitkem těla RMU a spojena s trvalomagnetickým mechanismem prostřednictvím izolační tyče v lineární konfiguraci. Otevírací protiváha je umístěna na pohonu každé fáze trvalomagnetického mechanismu. Celková struktura jednoho přímého trvalomagnetického mechanismu je znázorněna na obrázku 1 a jeho montážní schéma v rámci pevně izolované RMU je zobrazeno na obrázku 2.


2. Matematický model obvodu pohonu trvalomagnetického mechanismu
Přímý trvalomagnetický mechanismus navržený zde je založen na principu mechanismu s jedním stabilním stavem. Používá pohonnou metodu, kdy se nabité kondenzátory vybíjejí k aktivaci trvalomagnetického mechanismu. Schéma obvodu je znázorněno na obrázku 3, kde C představuje kondenzátor používaný pro pohon trvalomagnetického mechanismu, R označuje ekvivalentní odpor cívky trvalomagnetického mechanismu a L ekvivalentní indukci cívky.

Dynamické charakteristiky mechanismu s jedním stabilním stavem splňují systém diferenciálních rovnic znázorněných v rovnici (1):

kde i je proud zapínání nebo vypínání procházející cívkou (A); uC je počáteční napětí nabitého kondenzátoru (V); R je ekvivalentní odpor cívky (Ω); C je kapacita nabitého kondenzátoru (F); ψ je celkový magnetický propustnost elektromagnetického systému (Wb); m je ekvivalentní hmotnost pohyblivých částí odkazovaná na pohyblivý jádro (kg); x je posun pohyblivého jádra (m); v je rychlost pohyblivého jádra (m/s); Fx je elektromagnetická síla působící na pohyblivé jádro (N); Ff je opačná síla působící na pohyblivé jádro (N). Řešením tohoto systému rovnic jsou získány dynamické charakteristiky trvalomagnetického mechanismu.

3. Ekvivalence protisíly
Hlavní protisíly v okruhové hlavní jednotce zahrnují tlak kontaktu komory pro uhasení oblouku a sílu otevírací pružiny trvalomagnetického mechanismu. Tyto protisíly jsou ekvivalentně odkazovány na pohyblivé jádro trvalomagnetického mechanismu. Komora pro uhasení oblouku má vzdálenost otevření kontaktu 9,5 mm a přetah 2,5 mm, s celkovým zdvihem mechanismu 12 mm. Síly otevírací pružiny a kontaktové pružiny jsou změřeny podle pohybu trvalomagnetického mechanismu a křivka protisíly je vytvořena na základě specifických dat. Podrobné body ekvivalence protisíly jsou uvedeny v tabulce 1.

4 Vytvoření simulačního modelu
Dynamické charakteristiky přímého trvalomagnetického mechanismu jsou řešeny pomocí metody konečných prvků (FEM). Základní princip FEM spočívá v diskretizaci kontinuálního řešení do konečného počtu prvků propojených uzly. Po analýze jednotlivých prvků se provádí globální sestavení, uplatňují se okrajové podmínky a finální řešení se získá počítačovým výpočtem. V tomto studii se používá software Ansoft pro simulaci metodou konečných prvků k vytvoření simulačního modelu trvalomagnetického mechanismu a nastavují se materiálové parametry jeho složek. Trvalomagnetický materiál je definován jako NdFe35 a materiál nosníku jako ocel-1010.
Dále jsou přiřazeny parametry cívky: nabíjecí napětí kondenzátoru je 110 V, kapacita 0,047 F, DC odpor cívky 5 Ω, počet závitů 500 a indukce 0,0143 H. Protože přímý trvalomagnetický mechanismus je typu s jedním stabilním stavem, otevírací operace je poháněna silou otevírací pružiny. Proto je potřeba jen malý reverzní proud k vygenerování reverzního magnetického toku, který zruší tok generovaný trvalým magnety, což umožní mechanismu otevřít pod vlivem protisíly pružiny. K snížení požadovaného reverzního magnetického toku bylo po rozsáhlých simulacích a testech přidáno sériové DC odpor 5 Ω do otevíracího pohonného obvodu.
Nakonec se provádí povrchové a prostorové modelování a sítě trvalomagnetického mechanismu. Relativně hustá síť je aplikována na klíčové magnetické součásti, jako jsou pohyblivé jádro, magnetické krytky, nosník a trvalý magnet, zatímco hrubější síť se používá pro nemagnetické části.
5 Analýza výsledků simulace a experimentu
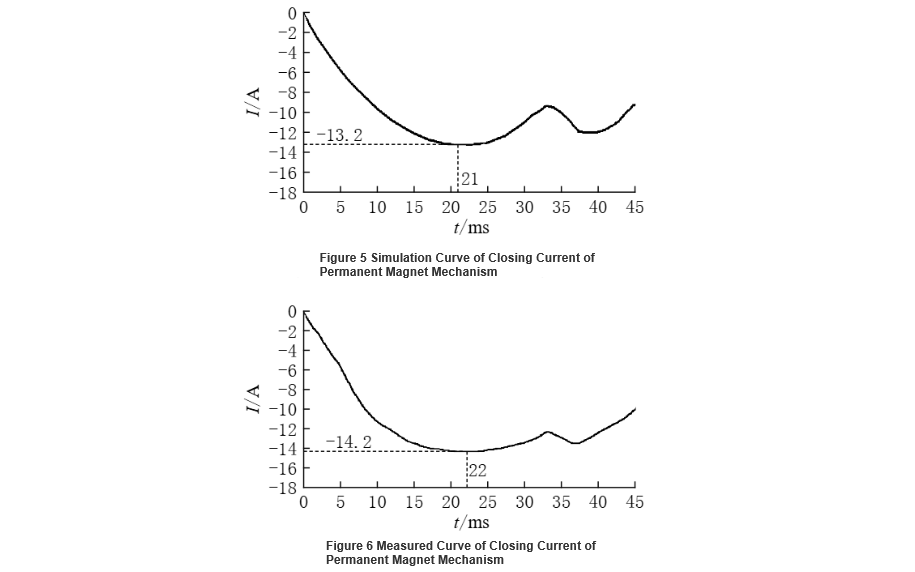
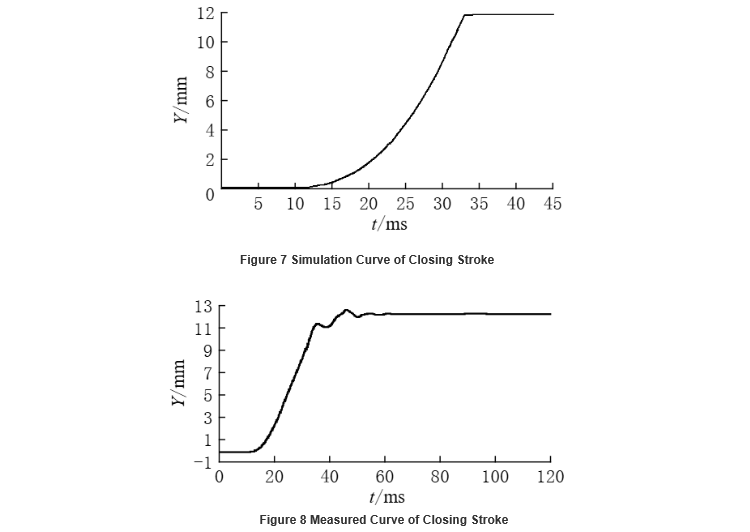
Elektrické a mechanické charakteristiky přímého trvalomagnetického mechanismu jsou analyzovány kombinací simulací Ansoft a skutečných testů produktu, s důrazem na charakteristiky proudu a zdvihu při zapínání a vypínání. Obrázek 5 ukazuje simulovanou křivku proudu při zapínání s vrcholovým proudem 13,2 A. Obrázek 6 zobrazuje osciloskopicky změřený proud při zapínání s naměřeným vrcholovým proudem 14,2 A. Obrázek 7 prezentuje simulovanou křivku zdvihu při zapínání, která dává rychlost zapínání (průměrná rychlost v posledních 6 mm před uzavřením kontaktu) 0,8 m/s. Obrázek 8 ukazuje osciloskopicky změřenou rychlost zapínání, která je 0,75 m/s. Výsledky naznačují, že mechanické charakteristiky zapínání navrženého přímého trvalomagnetického mechanismu pro pevně izolovanou okruhovou hlavní jednotku splňují požadavky spínacích přístrojů a chyba mezi simulací a experimentálními výsledky spadá do přijatelného návrhového rozmezí.
6 Závěr
Tento článek navrhuje přímý trvalomagnetický mechanismus pro pevně izolované okruhové hlavní jednotky. Proud a mechanické charakteristiky zdvihu mechanismu při zapínání a vypínání byly analyzovány a porovnány pomocí počítačové simulace a skutečných testů produktu. Výsledky ukazují, že založený simulační model dynamických charakteristik může sloužit jako teoretická základna pro praktický návrh trvalomagnetického mechanismu. Přímý trvalomagnetický mechanismus je vhodný pro použití v pevně izolovaných okruhových hlavních jednotkách, s nízkým pohonným proudem a vynikajícími mechanickými vlastnostmi, jako jsou rychlosti zapínání a vypínání, plně splňuje technické požadavky. Poskytuje také technickou základnu pro budoucí vývoj vysokonapěťových synchronních fázových výběrových spínačů.










