
Тұрақты изоляциялы көп айналмалы бөлшектерді (RMU) қысқартуға жоғары талаптар болғандықтан, үш фазаны бірімен жабуға мүмкіндік беретін традиционды тұрақты магнитті механизмдер RMU-ның жалпы қысқарту талаптарына сәйкес емес. Сондықтан, бұл контекстте құрылған тұрақты магнитті механизм үш фазада независимдеу туынды құрылымын қолданады. Арқылық өту камерасының әр фазасы RMU-ның лейкиясымен бірге жасалған және тұрақты магнитті механизмин мен ізоляциялық палка арқылы сызықтық түрде байланыстырылады. Ашу кері түскен пружина әр фазаның тұрақты магнитті механизминің айналу шағында орналасқан. Бір туынды тұрақты магнитті механизмдің жалпы құрылымы 1-суретте, ал оның RMU-нда жоспарлау схемасы 2-суретте көрсетілген.


2. Тұрақты магнитті механизмдің жүктеп отыру цептерінің математикалық модельі
Бұл жерде құрылған туынды тұрақты магнитті механизм бір стабильді қалыптасқан тұрақты магнитті механизм принципіне негізделген. Ол жұмыс істеу ықты конденсатордың зарядын тұрақты магнитті механизмге қолдану арқылы жүзеге асырылады. Цептің схемасы 3-суретте көрсетілген, мұнда C - тұрақты магнитті механизмді жүктеп отыру үшін қолданылатын конденсатор, R - тұрақты магнитті механизм спиральінің эквивалентті сопротивления, L - спиральдің эквивалентті индуктивтілігі.

Бір стабильді тұрақты магнитті механизмдің динамикалық қасиеттері 1-теңдеудегі дифференциалды теңдеулер жүйесін қанағаттандырады:

мұнда i - спираль арқылы өтетін ачу немесе жабу ағымы (А); uC - зарядталған конденсатордың бастапқы напряжение (В); R - спиральдің эквивалентті сопротивления (Ом); C - зарядталған конденсатордің емдігі (Ф); ψ - электромагнитті системаның жалпы магниттік потенциалы (Вб); m - қозғалыс құрылымының теңестірілген массасы (кг); x - қозғалыс құрылымының деформациясы (м); v - қозғалыс құрылымының жылдамдығы (м/с); Fx - қозғалыс құрылымына тәсіл ететін электромагнитті күш (Н); Ff - қозғалыс құрылымына кері түскен күш (Н). Бұл теңдеулер жүйесін шешу арқылы тұрақты магнитті механизмдің динамикалық қасиеттері анықталады.

3. Кері түскен күштердің теңестірілуі
Көп айналмалы бөлшектердің автоматты алу-беру модуліндегі негізгі кері түскен күштер - арқылық өту камерасының контакттық басын және тұрақты магнитті механизмдің ашу пружинасының күші. Бұл кері түскен күштер тұрақты магнитті механизмдің қозғалыс құрылымына теңестіріледі. Арқылық өту камерасының контакттық ашу аралығы 9,5 мм, өту 2,5 мм, жалпы механизм қозғалысы 12 мм. Ашу пружинасы және контакттық пружинасының кері түскен күштері тұрақты магнитті механизмдің қозғалыс қозғалысына қарай өлшенеді, және конкретті деректерге негізделген кері түскен күштер графигі сызылады. Деталды кері түскен күштердің теңестірілуі 1-таблицада көрсетілген.

4 Моделдеу құрылымын құру
Туынды тұрақты магнитті механизмдің динамикалық қасиеттері конечті элементтер әдісі (FEM) арқылы шешіледі. FEM-нің негізгі принципі - өзгеріс тобын шектеу үшін белгілі бір элементтер санына бөлу, оларды ұяшықтарда байланыстыру, әрбір элементті талдау, глобалдық біріктіру жасау, шекаралық шарттарды қолдану және компьютер арқылы шешім алу. Бұл зерттеуде Ansoft конечті элементтер моделиндеу бағдарламасы қолданылып, тұрақты магнитті механизмдің моделиндеу құрылымы құрылған, оның компоненттерінің материалдық параметрлері қойылған. Тұрақты магнитті материал NdFe35 деп анықталған, ал каркас материалы сталь-1010.
Келесінде спираль параметрлері қойылған: конденсатордың зарядтау напряжение 110 В, емдігі 0,047 Ф, спиральдің DC сопротивления 5 Ом, виток саны 500, индуктивтілігі 0,0143 Гн. Туынды тұрақты магнитті механизм бір стабильді типті, сондықтан ашу операциясы ашу пружинасының күші арқылы жүзеге асырылады. Сондықтан, тұрақты магниттін магнитті потенциалын басу үшін өте аз кері ағым қажет. Көптеген моделидеу және тесттер арқылы, ашу жүктеп отыру цептеріне 5 Ом DC сопротивление қосылған.
Соңында, тұрақты магнитті механизмдің беттік және денелік моделиндеу және қысыру жүріледі. Негізгі магнитті компоненттер, мисалы, қозғалыс құрылымы, магнитті жақтар, каркас және тұрақты магнитке қарағанда тығыздықты қысыру қолданылады, ал немагнитті бөлшектерге қарағанда қысыру жеңілдетіледі.
5 Моделидеу және эксперименттік нәтижелерді талдау
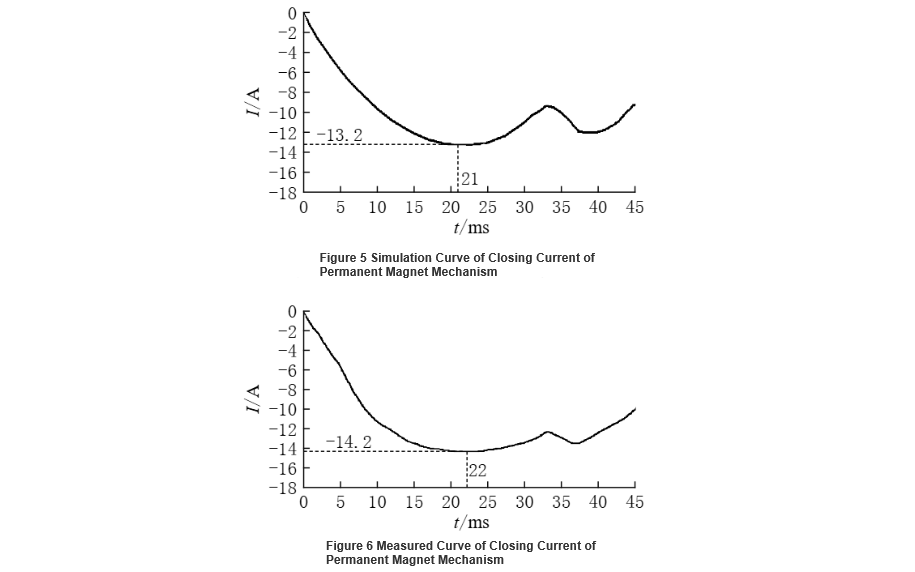
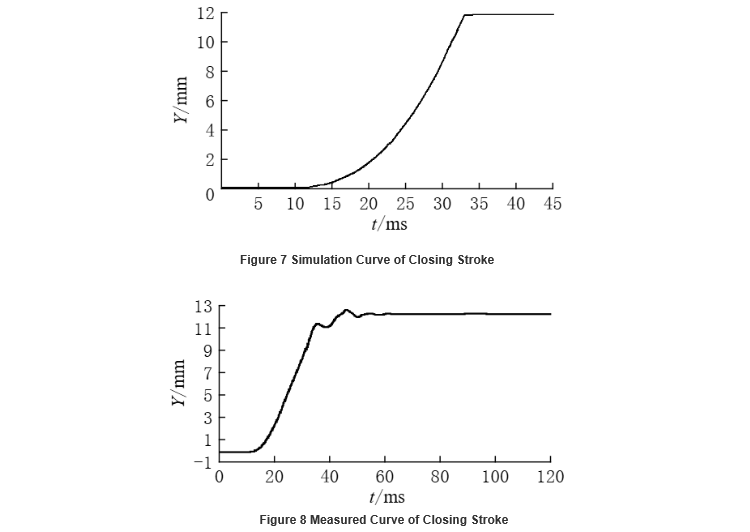
Туынды тұрақты магнитті механизмдің электр және механикалық қасиеттері Ansoft моделидеулерімен және нақты продукт тесттерімен бірге талдау жүргізіледі, өсу және ашу ағымдары мен қозғалыс қасиеттеріне ұстап назар аударылады. 5-суретте моделиденген өсу ағымының графигі көрсетілген, максималды ағым 13,2 А. 6-суретте осциллографпен өлшенген өсу ағымы көрсетілген, өлшенген максималды ағым 14,2 А. 7-суретте моделиденген өсу қозғалысының графигі көрсетілген, өсу жылдамдығы (контакттың жабылуынан өту үшін соңғы 6 мм аралығында орташа жылдамдық) 0,8 м/с. 8-суретте осциллографпен өлшенген өсу жылдамдығы көрсетілген, ол 0,75 м/с. Нәтижелер тұрақты изоляциялы көп айналмалы бөлшектер үшін құрылған туынды тұрақты магнитті механизмдің өсу механикалық қасиеттерінің коммутаторлық техника талаптарына сай екендігін көрсетеді, модельдеу және эксперименттік нәтижелердің арасындағы қате қабылданатын дизайн аралығында тұрады.
6 Жалпылау
Бұл мақалада тұрақты изоляциялы көп айналмалы бөлшектер үшін туынды тұрақты магнитті механизм құрылды. Механизмдің өсу және ашу ағымдары мен механикалық қозғалыс қасиеттері компьютерлік модельдеу және нақты продукт тесттері арқылы талдау жүргізілді және салыстырылды. Нәтижелер қойылған динамикалық қасиеттердің модельдеу құрылымының практикалық тұрақты магнитті механизмді құру үшін теориялық негіз болуы мүмкін екендігін көрсетеді. Туынды тұрақты магнитті механизм тұрақты изоляциялы көп айналмалы бөлшектерде қолданылғанда, ағымды жүктеп отыру, өсу және ашу жылдамдықтары сияқты жақсы механикалық қасиеттері бар, техникалық талаптарға толық сай. Бұл әрі әлсіз жылдамдықта фаза таңдау коммутаторларын әрі әлсізді өсу үшін техникалық негіз болады.










