
З високим попитом на мініатюризацію твердотільних ізольованих кільцевих головних єдиниць (RMU), традиційні однофазні постійні магнітні механізми з трьохфазним взаємозамиканням не можуть задовольнити загальні вимоги до мініатюризації обладнання. Тому проектований постійний магнітний механізм використовує структуру з незалежною прямою дією для кожної фази. Кожна фазова одиниця гасительного камери зливана з корпусом RMU і з'єднана з постійним магнітним механізмом через ізоляційну паличку у лінійному розташуванні. Пружина протидії для відкривання розташована на привідному валу кожного фазового постійного магнітного механізму. Загальна структура одного прямої дії постійного магнітного механізму показана на рисунку 1, а його схема зборки в твердотільному ізольованому RMU показана на рисунку 2.


2. Математична модель приводного контуру постійного магнітного механізму
Проектований прямої дії постійний магнітний механізм базується на принципі односполучного постійного магнітного механізму. Він використовує метод приводу, при якому заряджений конденсатор розряджається, щоб активувати постійний магнітний механізм. Схема контуру показана на рисунку 3, де C — це конденсатор, використовуваний для приводу постійного магнітного механізму, R — це еквівалентне опору сполуки постійного магнітного механізму, а L — це еквівалентна індуктивність сполуки.

Динамічні характеристики односполучного постійного магнітного механізму задовольняють систему диференціальних рівнянь, показаних в рівнянні (1):

де i — це струм відкривання або закривання через сполуку (А); uC — початкове напруга зарядженого конденсатора (В); R — еквівалентне опору сполуки (Ом); C — ємність зарядженого конденсатора (Ф); ψ — загальна магнітна зв'язка електромагнітної системи (Вб); m — еквівалентна маса рухомих частин, віднесена до рухомого сердечника (кг); x — переміщення рухомого сердечника (м); v — швидкість рухомого сердечника (м/с); Fx — електромагнітна сила, що діє на рухомий сердечник (Н); Ff — протидіюча сила на рухомому сердечнику (Н). Розв'язання цієї системи рівнянь дає динамічні характеристики постійного магнітного механізму.

3. Еквівалентність протидіючих сил
Основні протидіючі сили в кільцевій головній єдиниці включають контактний тиск гасительного камери і силу пружини відкривання постійного магнітного механізму. Ці протидіючі сили еквівалентно віднесені до рухомого сердечника постійного магнітного механізму. Гасительна камера має відстань відкриття контакту 9,5 мм і перевищення 2,5 мм, з загальним ходом механізму 12 мм. Протидіючі сили пружини відкривання і контактної пружини вимірюються відповідно до ходу руху постійного магнітного механізму, і крива протидіючих сил будується на основі конкретних даних. Детальні точки еквівалентності протидіючих сил показані в таблиці 1.

4. Створення моделі симуляції
Динамічні характеристики прямої дії постійного магнітного механізму вирішуються за допомогою методу скінченних елементів (FEM). Основний принцип FEM полягає у дискретизації безперервної області рішення на скінченне число елементів, пов'язаних вузлами. Після аналізу окремих елементів проводиться глобальна збірка, встановлюються граничні умови, і остаточне рішення отримується за допомогою комп'ютерних обчислень. У цьому дослідженні використовується програмне забезпечення для симуляції скінченних елементів Ansoft для створення моделі симуляції постійного магнітного механізму, а також встановлюються параметри матеріалів його компонентів. Матеріал постійного магніта визначено як NdFe35, а матеріал ярма як сталь-1010.
Далі присвоюються параметри сполуки: напруга зарядження конденсатора становить 110 В, ємність — 0,047 Ф, опір постійного струму сполуки — 5 Ом, число обмоток — 500, індуктивність — 0,0143 Гн. Оскільки прямої дії постійний магнітний механізм є односполучним, операція відкривання здійснюється за допомогою сили пружини відкривання. Тому потрібен лише невеликий обернений струм, щоб створити обернений магнітний потік, який скасовує потік, створений постійним магнітом, дозволяючи механізму відкриватися під дією протидіючої сили пружини. Для зменшення необхідного оберненого магнітного потоку, після широких симуляцій і тестів, до контуру приводу відкривання додано 5-Омовий DC резистор.
Нарешті, виконується поверхневе і твердотільне моделювання та розбиття на сітку постійного магнітного механізму. Використовується більш щільна сітка для ключових магнітних компонентів, таких як рухомий сердечник, магнітні кінцеві кришки, ярма та постійний магніт, тоді як для немагнітних частин використовується більш розріджені сітки.
5. Аналіз результатів симуляції та експериментів
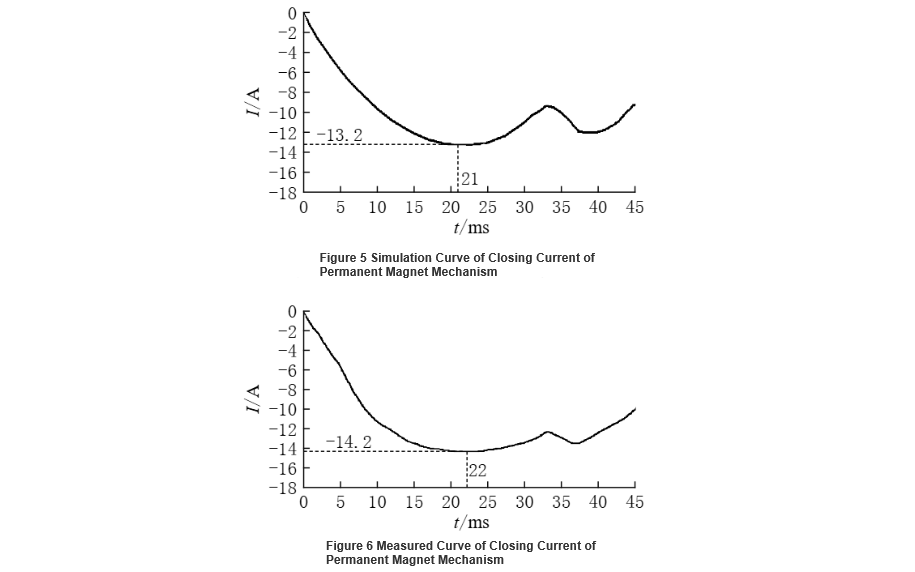
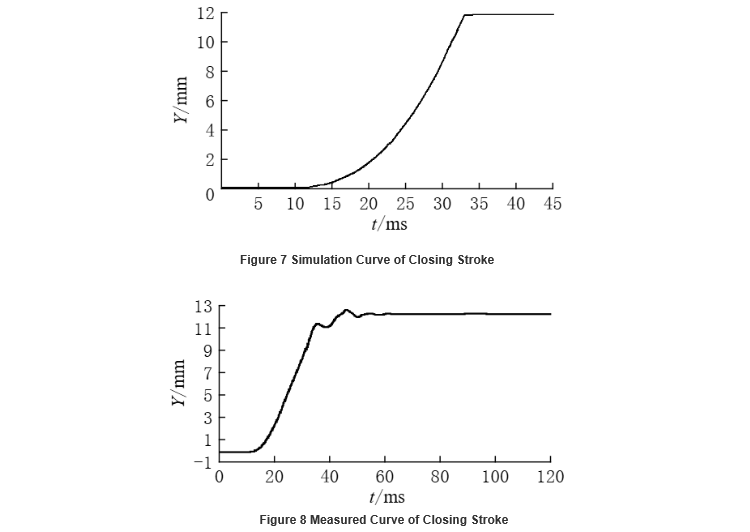
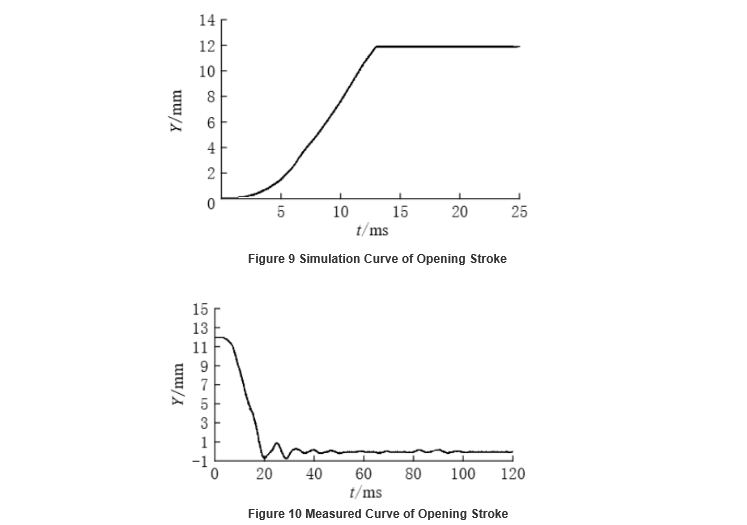
Електричні та механічні характеристики прямої дії постійного магнітного механізму аналізуються шляхом поєднання симуляцій Ansoft з реальними продуктами, з акцентом на струм і хід закривання та відкривання. Рисунок 5 показує симульовану криву струму закривання, з піковим струмом 13,2 А. Рисунок 6 показує осцилографічно виміряний струм закривання, з виміряним піком 14,2 А. Рисунок 7 представляє симульовану криву ходу закривання, що дає швидкість закривання (середня швидкість останніх 6 мм перед замиканням контакту) 0,8 м/с. Рисунок 8 показує осцилографічно виміряну швидкість закривання, яка становить 0,75 м/с. Результати показують, що механічні характеристики закривання проектованого прямої дії постійного магнітного механізму для твердотільної ізольованої кільцевої головної єдиниці відповідають вимогам комутаційного обладнання, і помилка між результатами симуляції та експерименту знаходиться в допустимому діапазоні проектування.
6. Висновки
У цій статті був запроектований прямої дії постійний магнітний механізм для твердотільної ізольованої кільцевої головної єдиниці. Струми закривання та відкривання, а також механічні характеристики ходу механізму були проаналізовані та порівняні за допомогою комп'ютерної симуляції та реального продуктного тестування. Результати показують, що встановлена модель динамічних характеристик симуляції може служити теоретичною основою для практичного проектування постійного магнітного механізму. Прямої дії постійний магнітний механізм добре підходить для використання в твердотільних ізольованих кільцевих головних єдиницях, відрізняючись низьким привідним струмом та відмінними механічними характеристиками, такими як швидкості закривання та відкривання, повністю відповідаючи технічним вимогам. Це також надає технічну основу для майбутнього розвитку високовольтних синхронних переключників вибору фази.










