
Propter magnam demandam ad miniaturisationem in unitatibus anularibus solidis insulatorum (RMUs), mechanismi magnetici permanentes traditionales cum interlocking triphasico non possunt satisfacere requirementis totales miniaturisationis apparatorum. Proinde, mechanismus magneticus permanens hic designatus adoptat structuram directam et independentem triphasica. Unitas arcus extinguendi cuiusque phasae est integrata cum corpore funditus RMU et connectitur ad mechanismum magneticum permodum insulantis virgulae in configuratione lineari. Mola counterforce aperturae est locata in axi motrici cuiusque phasae mechanismi magnetici permanentis. Structura totalis unius mechanismi magnetici permanentis directi ostenditur in Figura 1, et diagramma schematica eius assemblationis intra RMU solidum insulatum illustratur in Figura 2.


2. Modelus Mathematicus Circuitus Motricis Mechanismi Magnetici Permanentis
Mechanismus magneticus permanens directus hic designatus fundatur super principio mechanismi magnetici permanentis unistabilis. Utilizat methodum motricem ubi capacitor electrizatus dischargit ad actuationem mechanismi magnetici permanentis. Diagramma circuitus ostenditur in Figura 3, ubi C representat capacitorem pro motu mechanismi magnetici permanentis, R denotat resistentiam equivalentem spirea mechanismi magnetici, et L indicat inductivitatem equivalentem spirea.

Characteristicae dynamicae mechanismi magnetici permanentis unistabilis satisfaciunt systemati aequationum differentiarum ostento in Aequatione (1):

ubi i est currentus aperturae vel clausurae per spiream (A); uC est voltus initialis capacitoris carcentis (V); R est resistentia equivalentis spireae (Ω); C est capacitas capacitoris carcentis (F); ψ est fluxus magneticus totalis systematis electromagnetici (Wb); m est massa equivalentis partium mobilium referentia nucleum mobile (kg); x est translatio nucleo mobilis (m); v est velocitas nucleo mobilis (m/s); Fx est vis electromagnetica agens in nucleo mobilis (N); Ff est vis counteractans in nucleo mobilis (N). Solvendo hunc systema aequationum obtinentur characteristicae dynamicae mechanismi magnetici permanentis.

3. Aequivalence Counterforce
Principales counterforces in circuitu interruptoris unitatis anularis includunt pressionem contactus camerae arcus extinguendi et vim molae aperturae mechanismi magnetici permanentis. Haec counterforces referuntur equivalenter ad nucleum mobilis mechanismi magnetici permanentis. Camera arcus habet distantiam aperturae contactus 9.5 mm et over-travel 2.5 mm, cum cursu totali mechanismi 12 mm. Vires molae aperturae et molae contactus mensurantur secundum cursum motionis mechanismi magnetici permanentis, et curva counterforce delineatur ex datis specificis. Puncta aequivalentia counterforce sunt ostensa in Tabula 1.

4 Establishing Simulation Model
Characteristicae dynamicae mechanismi magnetici permanentis directi solvuntur per methodum elementorum finitum (FEM). Principium basicum FEM est discretizare dominium solutionis continuam in numerum finitum elementorum interconnectorum in nodis. Post analysis individualem elementorum, fit assemblatio globalis, et conditiones limites applicantur, cum solutione finali obtinenda per computationem computrionalis. In hoc studio, software simulationis elementorum finitum Ansoft utitur ad establishmentem modeli simulationis mechanismi magnetici permanentis, et parametri materialis componentium constituuntur. Materialis magnetis permanentis definitur ut NdFe35, et materialis yoke ut steel-1010.
Deinde, parametri spireae assignantur: voltus charging capacitoris 110 V, capacitas 0.047 F, resistentia DC spireae 5 Ω, numerus circulorum 500, et inductivitas 0.0143 H. Quia mechanismus magneticus permanens directus est unistabilis, operatio aperturae movetur per vim molae aperturae. Ergo, solum parvus currentus reversus requiritur ad generationem fluxus magnetici reversi ad cancellationem fluxus producti a magne permanenti, permittens mechanismum aperiri sub vi counterforce molae. Ad reductionem fluxus magnetici reversi necessarii, post multam simulationem et testing, additur resistentia DC 5 Ω in serie in circuitu motrici aperturae.
Postremo, efficitur modeling superficiale et solidum et meshing super mechanismo magnetico permanente. Applicatur mesh densior ad componentes magneticos key tales ut nucleus mobilis, capsae magnetic end, yoke, et magne permanens, dum mesh crassior utilisatur ad partes non-magneticas.
5 Analysis of Simulation and Experimental Results
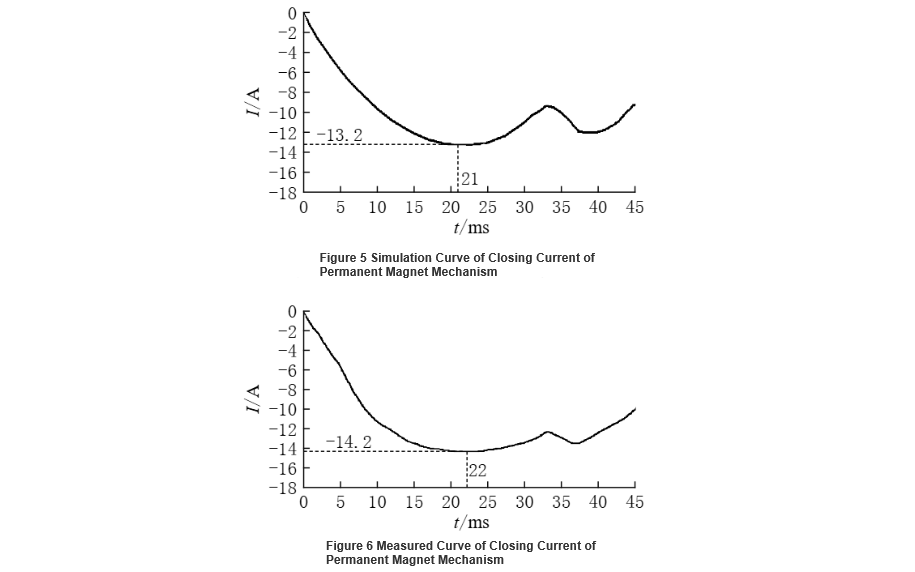
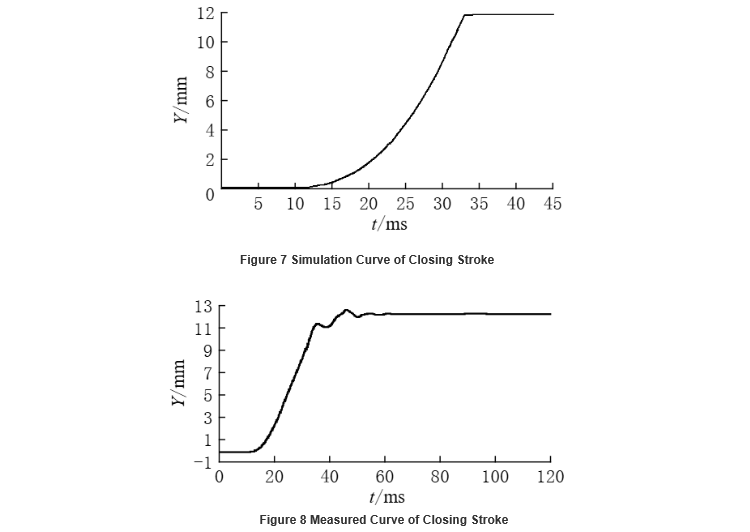
Characteristicae electricae et mechanicase mechanismi magnetici permanentis directi analysantur combinando simulationes Ansoft cum testibus producti realis, focus in currentibus clausurae et aperturae et characteristicae cursus. Figura 5 ostendit curvam currentus clausurae simulata, cum currentu maximo 13.2 A. Figura 6 ostendit currentum clausurae mensuratum oscilloscopio, cum currentu maximo mensurato 14.2 A. Figura 7 praebet curvam cursus clausurae simulata, producens velocitatem clausurae (velocitas media super ultimos 6 mm ante clausuram contactus) 0.8 m/s. Figura 8 ostendit velocitatem clausurae mensuratam oscilloscopio, quae est 0.75 m/s. Resultata indicant quod characteristicae mechanicase clausurae mechanismi magnetici permanentis directi designati pro unitate anulari solida insulata satisfaciunt requirementis apparatorum commutationis, et error inter resultata simulationis et experimentalis cadit intra rangum designi acceptabilem.
6 Conclusio
In hac dissertatione designatus est mechanismus magneticus permanens directus pro unitatibus anularibus solidis insulatorum. Analyzatae et comparatae sunt currentus clausurae et aperturae et characteristicae mechanicase cursus mechanismi per simulationem computrionalis et testes producti realis. Resultata ostendunt quod modelus simulationis characteristicae dynamicae constitutus potest servire ut basis theoretica pro designo mechanismi magnetici permanentis practico. Mechanismus magneticus permanens directus apte convenit ad usum in unitatibus anularibus solidis insulatorum, praebens currentem motricem parvum et excellentem performance mechanicam sicut velocitates clausurae et aperturae, plene satisfaciens requirementis technicas. Praebet etiam fundamentum technicum pro futura developmente switchs selectores phase synchronorum altae tensionis.










