
高電圧分離スイッチ(HVD)は、主に遮断器と組み合わせて電源を隔離するために使用される電力網における重要なスイッチング装置です。「デジタルグリッド」の提案、高電圧スイッチギア技術の継続的な進歩、そして中国の電力網の拡大とともに、HVDの応用は数量と多様性の両方で増加しています。電動操作機構は、HVDのスイッチング動作を制御する重要な部品であり、極めて高い信頼性と安定性が求められます。
HVDは高電圧設備の中で高い故障率を占めており、その主な原因は操作機構によるものです。一般的な操作機構の故障には、スイッチング拒否、操作失敗、不完全な開閉があります。モータが連続して回転し続ける操作機構の暴走は、電力網機器の大規模な停電につながります。これらのうち、開閉失敗(スイッチング拒否、不完全な動作、低スイッチング精度を含む)は電力網の安定性に大きな影響を与えます。
研究によると、電動操作機構によるHVDの故障は主に二次回路の問題、例えば二次回路内の電気部品の品質不良や接続の緩みによる制御失敗から生じることが多いです。広く使用されているCJx型電動操作機構では、内部のモータは熱磁気式遮断器と電子モータ保護装置によって保護されています。長期にわたって屋外に露出しているこれらの機構は、稼働後3〜6年間動作姿勢を維持しますが、電気制御部品は脆弱で環境要因に非常に影響を受けやすいです。
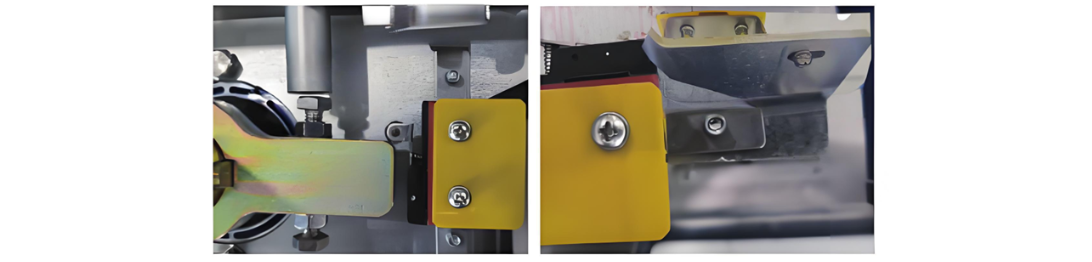
長時間の動作により、限界スイッチやボルトが緩み、未検出の場合(図1の5°の位置偏差が電力網にリスクをもたらすなど)、不完全なスイッチングにつながる可能性があります。移動スイッチはスイッチング過程の遷移において重要ですが、環境の影響により接触部が酸化し、寿命が短くなります。
要約すると、高電圧分離スイッチ(HVD)の開閉失敗の主な原因は、電気制御回路の故障と機械系の故障の2つに分類できます。この論文では、電気制御回路に焦点を当てています。これは主にモータ回路の故障、限界スイッチの故障、および二次回路の問題を含みます。分析によると、高頻度のスイッチング失敗は主にモータと二次回路の故障に起因し、HVDの動作に大きく影響しています。したがって、HVD操作機構の安全性と信頼性の解決は急務です。
1. 高電圧分離スイッチの研究状況
関連する研究者やエンジニアは、上記の問題について広範な研究を行い、建設的な解決策を提案しており、以下の2つの主要な側面にまとめられています:
1.1 二次回路の故障に関する研究状況
多くの研究が二次回路内の電気部品の問題に対処しています。操作機構箱の密封が不十分な場合、雨が侵入し、部品の腐食、補助スイッチ/リレーの故障、ボタン接点の緩み、機械的な詰まりなどが引き起こされ、スイッチング拒否または不完全な動作につながります。提案された解決策には定期的なメンテナンス、湿気保護、および迅速なトラブルシューティングのための故障フローチャートがあります。
モータの慣性によるピンの変形、限界ボルトの緩み、ねじの摩耗などの機械的摩耗に対しては、頻繁な検査とタイムリーな欠陥除去が推奨されます。腐食したワイヤ接合部には防錆材料を使用すること、二次回路の故障診断には電圧/抵抗テスト法が有効であり、欠陥記録によりトラブルシューティングの効率が向上します。湿度による問題、例えば補助スイッチのずれや電動操作機構の接触不良に対しては、加熱装置の導入が提案されています。
しかし、既存の研究は単に故障点を列挙し、メンテナンスを強調しているだけで根本的な解決策には至っていないため、二次回路に対する注目度が低いことがわかります。メンテナンス担当者はしばしば電気部品よりも機械部品を重視し、二次部品の構造や原理に精通していないことと定期的な検査が疎かになることが間接的な故障の原因となっています。
1.2 スイッチング精度の問題に関する研究状況
スイッチング精度と機械的な慣性を改善するために、学者たちはブラシレスDCモータ(BLDC)と永久磁石同期モータ(PMSM)を使用した操作機構を設計しました。DSPコアとデュアルクローズドループ制御戦略を採用したBLDCベースのHVD機構は、効果的なスイッチング速度調整を示しています。同様の方法でリアルタイムの速度監視を行うことで、滑らかな動作と閉鎖精度の向上が可能になり、スマートグリッドの発展の基礎となっています。ただし、これらの設計は理論的研究と実験室シミュレーションの段階にとどまっており、実際のアプリケーションでの信頼性はまだ証明されていません。
2 分散型電動操作機構の設計案
上記の分析に基づいて、操作機構の故障の主な原因は、環境要因に非常に影響を受けやすい電気制御回路の信頼性が低いことです。メンテナンスの遅延や他の問題により、電気部品が損傷し、スイッチング失敗につながります。これを解決するために、本論文では分散型の電動操作機構の設計を提案します。
2.1 電動操作機構の分散制御概念
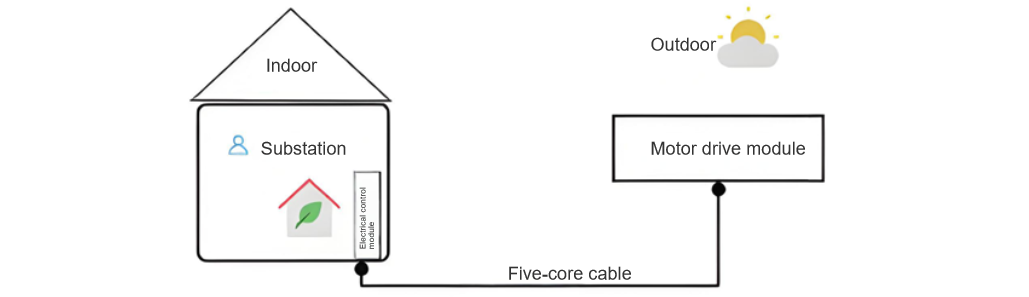
分散制御は、全体システムを個別のセグメントに分割し、それぞれがメインコントローラーによって独立して制御されます。この設計では、電気制御モジュールとモータ駆動モジュールを分離します:
変動する屋外環境とケーブルの感受性を考慮し、TRIZの多重使用の原則に基づいて時間分割共有ケーブル戦略を採用します。モータ制御回路とスイッチング状態表示回路は同時にアクティブにする必要がないため、このアプローチにより、モータ制御と分離スイッチの位置表示の信号伝送をわずか5本のケーブルで行うことができます。これにより、外部環境が電動操作機構に与える影響が大幅に減少します。分散型電動操作機構の全体的な制御概念は図2に示されています。
2.2 分散制御モジュールの設計
広く使用されているCJxシリーズの電動操作機構は、電気と機械の部品が統合されており、設置後は固定構成で年間を通じて屋外で動作します。この統合は、高故障率の主要な要因となっています。モジュラー設計は、この一括屋外セットアップを破壊し、機構を電気制御モジュールと機械駆動モジュールの2つの別々のモジュールに分割します。
モジュラー設計は以下の利点があります:電気制御モジュールを温度安定した環境に配置することで、HVDスイッチング操作への環境影響を大幅に削減することができます。また、モジュール間の配線を最小限に抑えることで、故障モジュールの迅速な交換が可能になり、「交換優先、修理後」のアプローチによりメンテナンス効率が向上し、電力網のダウンタイムが減少します。
2.2.1 電気制御モジュール
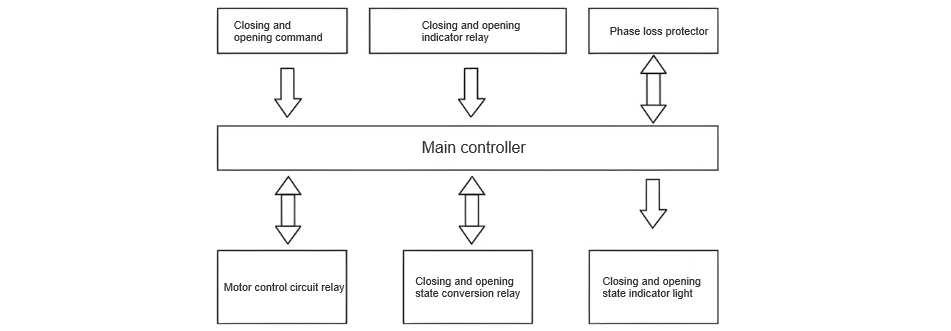
電気制御モジュールは、メインコントローラー、開閉転送スイッチ、リレー、位置表示回路、および相欠落保護器で構成され、図3の設計コンセプトに示されています。
制御ロジックは以下の通り機能します:ボタンからのスイッチング信号(開閉)がコントローラーに送られ、コントローラーは命令に基づいてモータの動作を制御します。HVDが開いた状態にあるとき、開位置回路が活性化し、インジケーターが点灯します。閉じるボタンを押すと、コントローラーがメインモータリレーと閉じる回路転送リレーを接続し、HVDを閉じるように駆動します。完了すると、モータリレーが非励磁となり、閉位置回路とインジケーターが活性化します。相欠落保護器はタイマー機能を備えており、故障時には指定された時間内に主回路を切断します。
2.2.2 モータ駆動モジュール
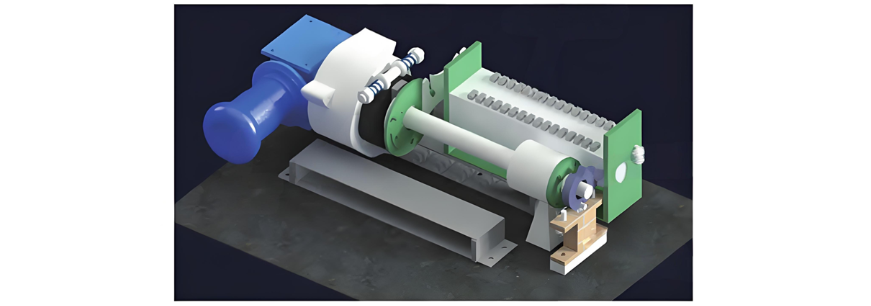
モータ駆動モジュールは主にACモータ、減速機、摩擦クラッチ、シーメンス補助スイッチ、サイリスタ消弧回路、限界ストッパー、および機械ロック装置で構成されています。メインコントローラーが開閉命令を送ると、モータ制御回路が活性化し、モータを介して減速機と主軸を駆動してスイッチング操作を行います。主軸の上部にある限界ストッパーと機械ロック装置がスイッチング位置の精度を制御します。同時に、シーメンス補助スイッチとサイリスタ消弧回路が協調してモータ制御回路を切断し、モータの動作を停止します。減速機と主軸の接続部には90度の回転余裕があり、モータの無負荷起動を可能にします。モータ駆動モジュールの外観は図4に示されています。
2.3 分離スイッチの閉鎖精度の解決策
閉鎖動作は高電圧スイッチギアにとって重要なステップです。不十分な閉鎖精度は、電力システム全体の安定動作に影響を与えます。電動操作機構の開閉精度をさらに向上させるために、この設計では機械ロック装置、シーメンス補助スイッチ、および摩擦クラッチを組み合わせて、一定程度まで精度を改善します。
2.3.1 シーメンス補助スイッチとサイリスタ消弧回路
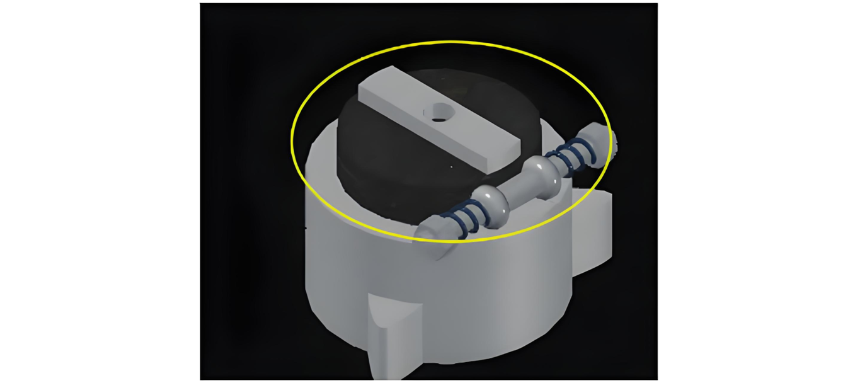
補助スイッチは主モータ回路に接続され、モータ回路のオンオフを制御します。補助スイッチは外部環境の影響による錆びにくい構造になっており、内部の摩擦機構により誤った閉鎖を防止します。接点はスプリング式ピンと硬い鞘を使用して安定かつ信頼性の高い接続を確保します。具体的な構造は図6に示されています。

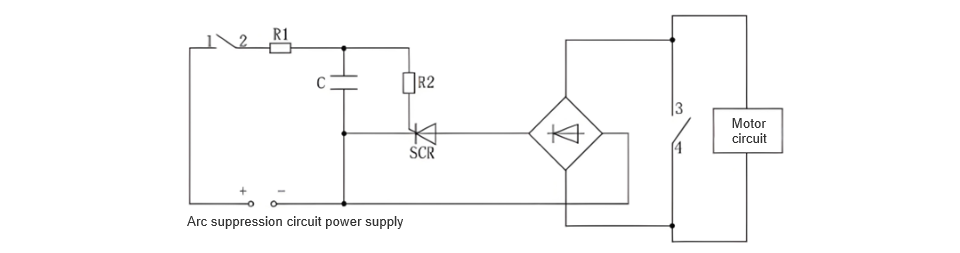
サイリスタ消弧回路の設計原理: 補助スイッチの切り離し時にアークが生成されます。アークが大きくなりすぎてスイッチを損傷しないように、補助スイッチと並列にサイリスタ消弧回路を接続してアークを吸収します。具体的な回路設計は図7に示されています。ここで、接点1、2、3、4はすべて補助スイッチの接点です。(接点1と2はサイリスタ消弧回路のオンオフを制御し、接点3と4は主モータ回路のオンオフを制御します。接点3と4が切断された後に接点1と2が切断されることで消弧の目的を達成します)。
2.3.2 摩擦クラッチの機能
摩擦クラッチは、異常な動作条件下でもモータを保護します。高電圧分離スイッチが閉鎖後に位置を固定すると、主モータ回路が急速に切断されます。しかし、機械的な回転慣性によりモータがすぐに停止しません。この時、摩擦クラッチは力の緩和部品として機能します。摩擦ギアをアイドル状態にすることで、モータの機械的な慣性を消散させ、高電圧分離スイッチの開閉操作中の正確な位置決めを確保します。さらに、スプリングの緊密さを調整することで、摩擦トルクを変更し、さまざまな分離スイッチの開閉操作に適応することができます。摩擦クラッチは図8に示されています。
提案された設計案のCJx型電動操作機構に対する利点
提案された設計は、トラベルスイッチや限界スイッチなどの電気部品を排除し、不安定要素を削減し、電動操作機構の信頼性を向上させます。また、多くの接点を持つ端子台を排除し、配線回路を簡素化します。モジュラー設計により、2つのモジュールをわずか5本のケーブルで接続し、故障修復効率が大幅に向上します。さらに、熱磁気式遮断器と既存の電子モータ保護装置との組み合わせにより、複数の保護層を形成することができます。電気制御回路が故障しても、機械ロック装置と摩擦クラッチによりモータの安全性が確保されます。摩擦クラッチはモータの機械的な慣性からの力を中和し、機械ロック装置は限界ストッパーの「反発」を防ぎ、高電圧分離スイッチの正確な開閉とその完全性を保護します。また、モータの無負荷起動により始動電流が最小限に抑えられ、設備へのショックを避けて操作機構の耐用年数を延ばします。
3 実験的検証
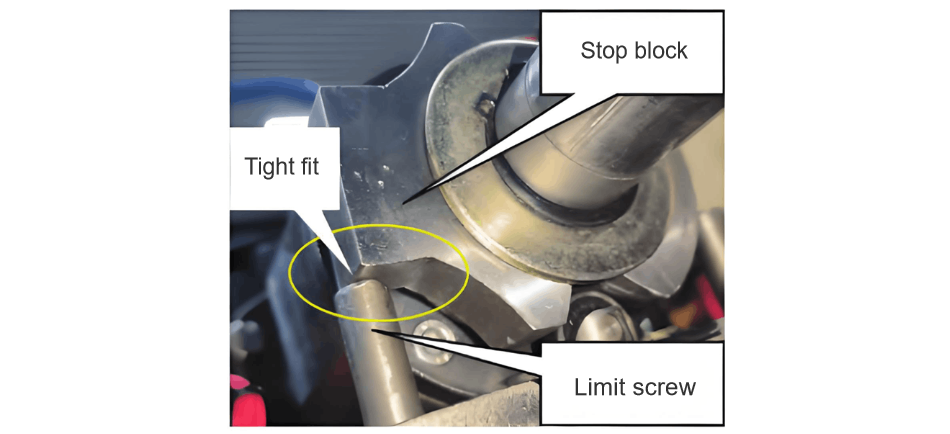
「高電圧交流分離スイッチおよび接地スイッチ」および「高電圧交流スイッチギアおよび制御ギアの共通技術要件」などの関連基準に従って、機械ロック装置と摩擦クラッチの組み合わせにより、分離スイッチの開閉精度がさらに向上します。CJxシリーズの電動操作機構と比較して、より高い信頼性と安全性を提供します。多次元開閉試験と限界ストッパーと限界ねじ間の角度偏差測定によるエラーチェックでは、それらが密接に一致し、実際の加工誤差が1°以内であることが確認されました。これは技術標準を満たしています。実際の位置は図9に示されています。

4 結論
高電圧分離スイッチの操作機構は電力網の重要な設備の一つであり、その信頼性と安全性は極めて重要です。本論文では、電動操作機構を対象として、分散制御方法の詳細な設計と分析を行い、実験により検証し、期待通りの結果を得ました。分散制御の概念に基づき、モータはメインコントローラーによって安全かつ正確に高電圧分離スイッチの開閉操作を制御します。
モジュラー設計アプローチにより、電動操作機構は主に電気制御モジュールとモータ駆動モジュールに分割され、配線の複雑さが削減され、メンテナンス速度が向上します。機械ロック装置を設置し、シーメンス補助スイッチと摩擦クラッチの特殊な構造と組み合わせることで、分離スイッチの開閉精度が向上しました。










