
Gli interruttori di separazione ad alta tensione (HVD) sono dispositivi di commutazione critici nelle reti elettriche, utilizzati principalmente per isolare le sorgenti di alimentazione in combinazione con i disgiuntori. Con la proposta delle "reti digitali", l'evoluzione continua della tecnologia degli apparati di alta tensione e l'espansione della rete elettrica cinese, le applicazioni HVD sono aumentate sia in quantità che in diversità. Il meccanismo di manovra elettrico, un componente vitale che controlla i movimenti di commutazione degli HVD, richiede una notevole affidabilità e stabilità.
Gli HVD rappresentano una quota elevata dei guasti tra gli apparecchi di alta tensione, con i meccanismi di manovra come principale causa di malfunzionamenti. I guasti comuni dei meccanismi di manovra includono il rifiuto di commutazione, il malfunzionamento operativo e l'apertura/chiusura incompleta. La fuga del meccanismo di manovra, dove il motore continua a funzionare, può portare a interruzioni di energia significative negli apparecchi della rete. Tra questi, i malfunzionamenti di apertura/chiusura (incluso il rifiuto di commutazione, l'operazione incompleta e la bassa precisione di commutazione) influiscono notevolmente sulla stabilità della rete.
Le ricerche indicano che i guasti degli HVD causati dai meccanismi di manovra elettrica derivano principalmente da problemi dei circuiti secondari, come malfunzionamenti di controllo dovuti a componenti elettrici di scarsa qualità o connessioni allentate nel circuito secondario. Per i meccanismi di manovra elettrica del tipo CJx ampiamente utilizzati, i motori interni sono protetti da disgiuntori termomagnetici e dispositivi di protezione elettronici del motore. Esposti all'aperto per lunghi periodi, questi meccanismi mantengono la posizione operativa per 3-6 anni dopo la messa in servizio, ma i loro componenti di controllo elettrico sono fragili e altamente sensibili ai fattori ambientali.
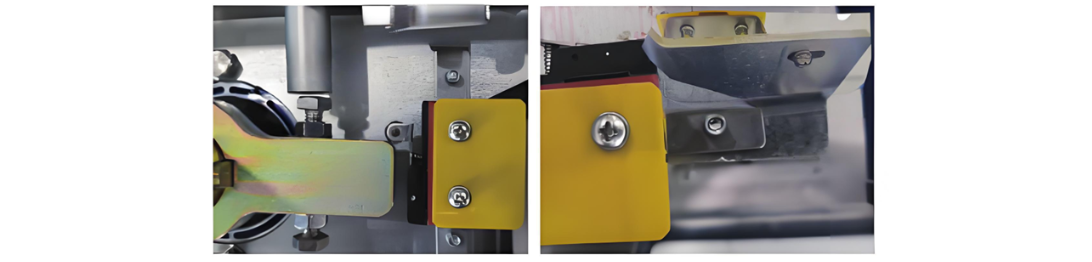
L'operazione prolungata può allentare i limit switch e i bulloni, portando a commutazioni incomplete se non rilevate (ad esempio, la deviazione di 5° nella Figura 1 rappresenta un rischio per la rete). I limit switch, fondamentali per le transizioni del processo di commutazione, soffrono di contatti ossidati e durata ridotta a causa dell'influenza ambientale.
In sintesi, le cause principali dei malfunzionamenti di apertura/chiusura degli interruttori di separazione ad alta tensione (HVD) possono essere categorizzate in due tipi: guasti del circuito di controllo elettrico e guasti del sistema meccanico. Questo articolo si concentra sul circuito di controllo elettrico, che include principalmente guasti del circuito del motore, malfunzionamenti dei limit switch e problemi del circuito secondario. L'analisi mostra che i tassi elevati di malfunzionamento di commutazione sono attribuiti principalmente ai guasti del motore e del circuito secondario, influendo notevolmente sul funzionamento degli HVD. Pertanto, è urgente risolvere la sicurezza e l'affidabilità dei meccanismi di manovra degli HVD.
1. Stato della ricerca sugli interruttori di separazione ad alta tensione
Ricercatori e ingegneri pertinenti hanno condotto studi estesi su questi problemi e hanno proposto soluzioni costruttive, riassunte in due aspetti chiave:
1.1 Stato della ricerca sui guasti del circuito secondario
Numerosi studi hanno affrontato i problemi dei componenti elettrici nei circuiti secondari. Un cattivo sigillaggio della scatola del meccanismo di manovra permette l'ingresso di acqua piovana, causando la corrosione dei componenti, il malfunzionamento degli interruttori ausiliari/relè, i contatti dei pulsanti allentati e gli ingorghi meccanici, portando al rifiuto di commutazione o all'operazione incompleta. Le soluzioni proposte includono la manutenzione regolare, la protezione dall'umidità e diagrammi di flusso dei guasti per la risoluzione rapida dei problemi.
Per l'usura meccanica come pin deformati, bulloni di limite allentati o viti logorate a causa dell'inerzia del motore, si consigliano misure come ispezioni frequenti ed eliminazione tempestiva dei difetti. Si suggeriscono materiali anti-ossidazione per le giunzioni dei fili corrosi, mentre metodi di test di tensione/resistenza aiutano a diagnosticare i guasti del circuito secondario, migliorati dal registro dei difetti per migliorare l'efficienza della risoluzione dei problemi. Sono stati proposti dispositivi di riscaldamento per affrontare i problemi dovuti all'umidità come lo spostamento degli interruttori ausiliari e i contatti poveri nei meccanismi di manovra elettrica.
Tuttavia, gli studi esistenti elencano semplicemente i punti di guasto e enfatizzano la manutenzione senza soluzioni fondamentali, riflettendo una scarsa attenzione ai circuiti secondari. Il personale di manutenzione spesso sottovaluta i componenti elettrici rispetto a quelli meccanici, e la mancanza di familiarità con le strutture/principi dei componenti secondari, unita alla trascuratezza delle ispezioni regolari, sono cause indirette di malfunzionamento.
1.2 Stato della ricerca sui problemi di precisione di commutazione
Per affrontare la precisione di commutazione e l'inerzia meccanica, gli studiosi hanno migliorato il controllo del motore progettando meccanismi di manovra basati su motori DC senza spazzole (BLDC) e motori sincroni a magnete permanente (PMSM). Un meccanismo HVD basato su BLDC con un core DSP e una strategia di controllo a doppio anello chiuso ha dimostrato una regolazione efficace della velocità di commutazione. Metodi simili per il monitoraggio in tempo reale della velocità assicurano un funzionamento fluido e una maggiore precisione di chiusura, ponendo le basi per lo sviluppo delle smart grid. Nota bene, questi progetti rimangono allo stadio di ricerca teorica e simulazione in laboratorio, con affidabilità non provata in applicazioni pratiche.
2 Progetto di schema di meccanismo di manovra elettrica distribuita
Sulla base dell'analisi precedente, la causa principale dei malfunzionamenti dei meccanismi di manovra è la scarsa affidabilità del circuito di controllo elettrico, altamente sensibile ai fattori ambientali. La manutenzione ritardata o altri problemi possono danneggiare i componenti elettrici, portando a malfunzionamenti di commutazione. In risposta, questo articolo propone un progetto distribuito per i meccanismi di manovra elettrica.
2.1 Concetto di controllo distribuito per i meccanismi di manovra elettrica
Il controllo distribuito divide l'intero sistema in segmenti separati, ciascuno controllato indipendentemente da un controller principale. Questo progetto separa il modulo di controllo elettrico dal modulo di pilotaggio del motore:
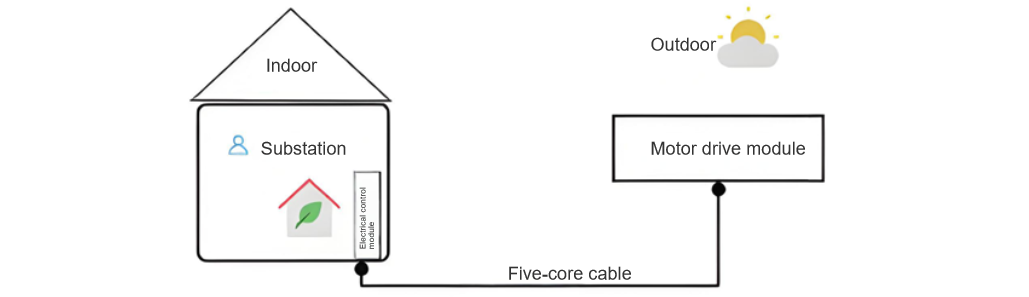
Considerando l'ambiente esterno variabile e la suscettibilità dei cavi, viene adottata una strategia di cavo condiviso a divisione temporale basata sul principio di multiuso di TRIZ. Poiché i circuiti di controllo del motore e i circuiti di indicazione dello stato di commutazione non necessitano di attivazione simultanea, questo approccio consente la trasmissione di segnali per il controllo del motore e l'indicazione della posizione dell'interruttore di separazione utilizzando solo 5 cavi. Ciò riduce significativamente gli impatti ambientali esterni sul meccanismo di manovra elettrica. Il concetto generale di controllo del meccanismo di manovra elettrica distribuita è illustrato nella Figura 2.
2.2 Progetto dei moduli di controllo distribuito
I meccanismi di manovra elettrica della serie CJx ampiamente applicati sono progettati con componenti elettrici e meccanici integrati, operando all'aperto tutto l'anno in una configurazione fissa dalla messa in servizio. Questa integrazione è un fattore chiave che contribuisce al loro tasso elevato di malfunzionamento. Il progetto modulare rompe questa configurazione all-in-one all'aperto dividendo il meccanismo in due moduli separati: un modulo di controllo elettrico e un modulo di pilotaggio meccanico.
Il progetto modulare offre vantaggi distinti: consente al modulo di controllo elettrico di essere ospitato in un ambiente a temperatura stabilizzata, riducendo notevolmente gli impatti ambientali sulle operazioni di commutazione HVD; e minimizza il cablaggio intermodulare, consentendo la rapida sostituzione dei moduli difettosi, priorizzando "sostituisci prima, ripara poi" per migliorare l'efficienza della manutenzione e ridurre i tempi di inattività della rete.
2.2.1 Modulo di controllo elettrico
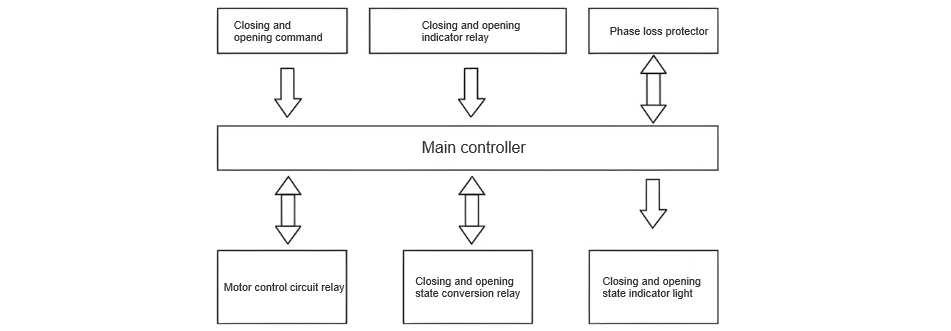
Il modulo di controllo elettrico comprende un controller principale, un interruttore di passaggio apri/chiudi, relè, circuiti di indicazione della posizione e un protettore contro la perdita di fase, come delineato nel concetto di progetto della Figura 3.
La logica di controllo funziona come segue: un segnale di commutazione (apri/chiudi) proveniente dal pulsante viene inviato al controller, che regola l'operazione del motore in base al comando. Quando l'HVD è nello stato aperto, il circuito di posizione aperta si attiva, accendendo l'indicatore. Premere il pulsante di chiusura attiva il controller per attivare il relè principale del motore e il relè di passaggio del circuito di chiusura, guidando l'HVD a chiudersi. Al completamento, il relè del motore si disattiva, attivando il circuito di posizione chiusa e l'indicatore. Il protettore contro la perdita di fase garantisce la sicurezza del circuito del motore con funzione di timer, disconnettendo il circuito principale entro un periodo specifico in caso di guasti.
2.2.2 Modulo di pilotaggio del motore
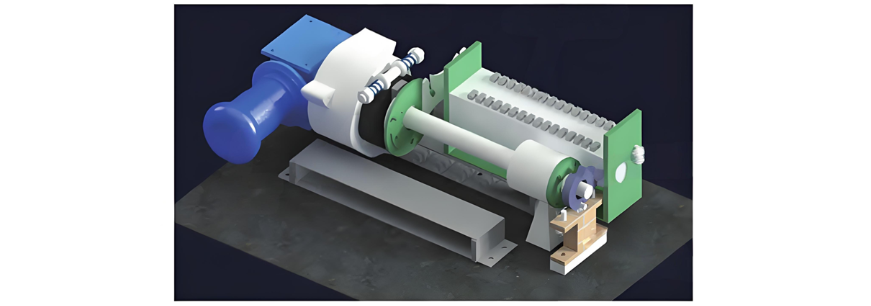
Il modulo di pilotaggio del motore è costituito principalmente da un motore AC, un riduttore di velocità, un accoppiamento a frizione, un interruttore ausiliario Siemens, un circuito di soppressione dell'arco a tiristori, limit stops e un dispositivo di blocco meccanico. Quando il controller principale invia un comando di apertura/chiusura, il circuito di controllo del motore si attiva, guidando il riduttore di velocità e l'albero principale attraverso il motore per le operazioni di commutazione. I limit stops in cima all'albero principale, in combinazione con il dispositivo di blocco meccanico, controllano la precisione della posizione di commutazione. Nel frattempo, l'interruttore ausiliario Siemens lavora con il circuito di soppressione dell'arco a tiristori per disconnettere il circuito di controllo del motore, arrestando l'operazione del motore. Un margine rotazionale di 90 gradi alla connessione tra il riduttore di velocità e l'albero principale consente l'avviamento a vuoto del motore. L'aspetto del modulo di pilotaggio del motore è mostrato nella Figura 4.
2.3 Soluzione per la precisione di chiusura dell'interruttore di separazione
L'azione di chiusura è un passo cruciale per gli apparati di alta tensione. Una precisione di chiusura insufficiente può influire sull'operazione stabile dell'intero sistema elettrico. Per ulteriormente migliorare la precisione di apertura e chiusura del meccanismo di manovra elettrica, questo progetto utilizza un dispositivo di blocco meccanico, in combinazione con un interruttore ausiliario Siemens e un accoppiamento a frizione, per migliorare la precisione fino a un certo punto.
2.3.1 Interruttore ausiliario Siemens e circuito di soppressione dell'arco a tiristori
L'interruttore ausiliario è collegato al circuito principale del motore per controllare l'accensione e lo spegnimento del circuito del motore. L'interruttore ausiliario non è soggetto alla ruggine a causa degli influssi ambientali esterni, e il suo meccanismo di frizione interno preven










