
Kõrgharvulised lülitid (HVD) on kriitilised lülitlusseadmed elektrivõrgus, mida peamiselt kasutatakse võrgu allikate isolatsiooniks ühenduses särklitega. "Digiagridi" ettepanekuga, kõrgharvuliste lülituste tehnoloogia pideva arenemisega ja Hiina elektrivõrgu laienemisega on HVD-rakendused suurenenud nii arvult kui mitmekesisuses. Elektriline juhtimismeetod, mis kontrollib HVD-lülituse liigutusi, nõuab erakordset usaldusväärsust ja stabiilsust.
HVD-d muutuvad kõrgharvulistes seadmetes tõsine katkemäär, mille peamiseks põhjuseks on juhtimismeetodid. Levinud juhtimismeetodi vead hõlmavad lülitamise keeldumist, tööviga ja ebapiisavat avamist/suletamist. Juhtimismeetodi jooksmine - kus mootor jätkab töötamist - võib põhjustada suuri energiakaotusi võrguseadmetes. Neist, avamise/suletamise vead (sh lülitamise keeldumine, ebapiisav toiming ja madal lülitamistäpsus) mõjutavad oluliselt võrgu stabiilsust.
Uurimused näitavad, et elektriliste juhtimismeetodite poolt põhjustatud HVD-vead tulenevad peamiselt teisikringi probleemidest, nagu juhtimisvigu halvade elektrooniliste komponentide või laske ühenduste tõttu teisikringis. Laialdaselt kasutatavatele CJx-tüüpi elektrilistele juhtimismeetoditele on sisemistel mootoritel termo-magnetilised särklid ja elektroonilised mootori kaitsevahendid. Kui need meetodid on pikka aega väljaspool, säilitavad nad 3–6 aasta jooksul operatiivsete positsioonide järel, kuid nende elektroonilised juhtimiskomponendid on nõrged ja väga tundlikud keskkonnategurite suhtes.
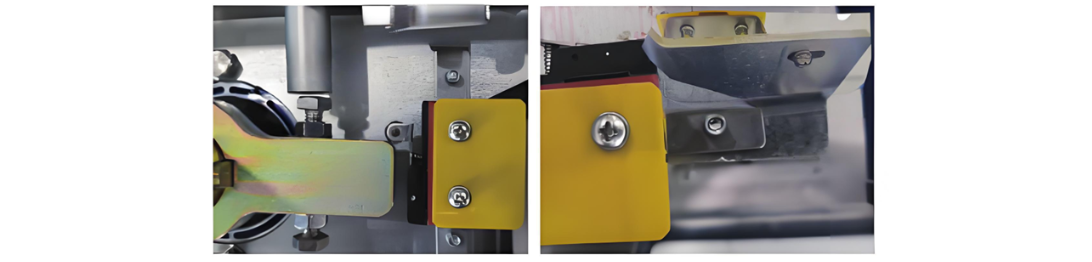
Pikaajaline töö võib laskea piirilülitajaid ja kruvide, mis viib ebapiisava lülitamiseni, kui seda ei tuvastata (nt 5° asukoha vahe Figure 1 tõstab võrgu riski). Reisilülitajad, mis on olulised lülitamisprotsessi üleminekuks, kannatavad kontaktide oksidele ja lühema eluea tõttu keskkonna mõjude tõttu.
Lühidalt, kõrgharvuliste lülitite (HVD) avamise/suletamise vigade peamised põhjused saavad kategooriseerida kahte tüüpi: elektriliste juhtimisringide vigade ja mehaaniliste süsteemide vigade. See artikkel keskendub elektrilistele juhtimisringidele, mis hõlmavad peamiselt mootoringluse vigu, piirilülitajate vead ja teisikringi probleeme. Analüüs näitab, et kõrge lülitamisvigade määr on põhitõeks mootorite ja teisikringi vigade tõttu, millel on oluline mõju HVD-funktsioonile. Seetõttu on kiireloomuline lahendada HVD juhtimismeetodite ohutus ja usaldusväärsus.
1. Uurimisstaatus kõrgharvuliste lülitite kohta
Vastavatel uurijatel ja inseneritel on tehtud laiaulatuslikke uuringuid eelnimetatud küsimustega seoses ja esitatud konstruktiivsed lahendused, mis on kokku võetud kahes olulises aspektis:
1.1 Teisikringi vigade uurimisstaatus
Paljud uuringud on käsitlenud teisikringi elektrooniliste komponentide probleeme. Väikelihaste puudulik sulgemine lubab sademete sisse sattuda, mis põhjustab komponentide korroodeerumist, abilülitajate/relide viga, laske nuppide kontakte ja mehaanilisi mahreid - mis viib lülitamise keeldumiseni või ebapiisavale toiminguni. Esitatud lahendused hõlmavad regulaarse hoolduse, niiskuse kaitse ja vigade skemade kiireks lahendamiseks.
Mehaanilise sõrmiku, laske piiripoltside või sõrmikute nõrastumise puhul mootori inertsiatunni tõttu soovitatakse sagedaseid kontrolle ja ajakohast vigade likvideerimist. Antioksidantsete materjalide kasutamine korroodeerunud joonte jaoks, samuti pingese/vastupanu testimismeetodid, aitavad diagnoosida teisikringi vigu - täiustades vigade logimist, et parandada lahendamise efektiivsust. Soovitatakse soojendusseadmeid, et lahendada niiskusest tingitud probleeme, nagu abilülitaja segadus ja elektriliste juhtimismeetodite hea kontakt.
Siiski, olemasolevad uuringud loetlevad lihtsalt vigade punkte ja rõhutavad hooldust ilma põhiline lahendusteta, mis näitab madalat tähelepanu teisikringile. Hoolduspersonal hindab sageli elektroonilisi komponente võrreldes mehaaniliste osadega, ja ebateadmuse teisikkomponentide struktuuri/prinitsiipe koos eiranud regulaarse kontrolliga, on kaudselt vigade põhjused.
1.2 Lülitamistäpsuse probleemide uurimisstaatus
Lülitamistäpsuse ja mehaanilise inertsiaga seoses on teadlased parandanud mootorijuhtimist, disainides sihiseta DC-mootori (BLDC) ja jäätmete synchronmootori (PMSM) juhtimismeetodeid. BLDC-põhine HVD-meetod DSP tuuma ja kaheks kinnitusega juhtstrategiaga on näidanud lülitamiskiiruse reguleerimise efektiivsust. Sarnased meetodid reaalajas kiiruse jälgimiseks tagavad sujuva toimingu ja parandatud sülge täpsust, luues aluse intelligentsete võrkude arendamiseks. Märgatavasti jäävad need disainid teoreetiliseks uuringuks ja laboritoiminguteks, ilma praktikas tõestatud usaldusväärsuseta.
2 Jaotatud elektriliste juhtimismeetodite disaini kava
Eelnimetatud analüüsi põhjal on juhtimismeetodite vigade peamiseks põhjuseks elektriliste juhtimisringide madal usaldusväärsus, mis on tundlik keskkonnategurite suhtes. Viivitav hooldus või muud probleemid võivad kahjustada elektroonilisi komponente, mis viib lülitamisvigadele. Sellele vastu esitab see artikkel jaotatud disaini elektriliste juhtimismeetodite jaoks.
2.1 Jaotatud juhtimiskeelde elektriliste juhtimismeetodite jaoks
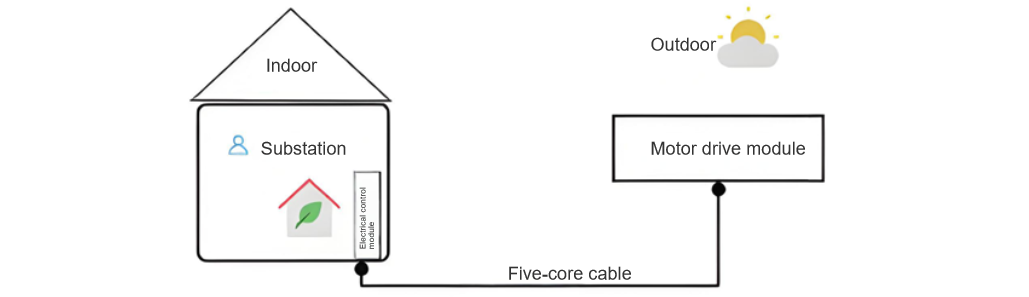
Jaotatud juhtimine jagab terve süsteemi eraldi segmentideks, mida kontrollitakse igaüks peamise juhtimise poolt. See disain eraldab elektrilise juhtimismooduli mootori juhtimismoodulist:
Arvestades muutlikku välises keskkonda ja kaabelite tundlikkust, kasutatakse TRIZ-i mitme kasutuse printsiibil põhinevat aja-jagatud kaabelistrateegiat. Kuna mootori juhtimisringid ja lülituse staatuse näitajaringid ei vaja samaaegset aktiveerimist, võimaldab see lähenemine signaalide edastamist nii mootori juhtimiseks kui ka lülitaja asukoha näitamiseks ainult 5 kaabeliga. See vähendab oluliselt välises keskkonna mõju elektrilistele juhtimismeetoditele. Jaotatud elektriliste juhtimismeetodite üldine juhtimiskeelde illustreeritakse Figure 2-s.
2.2 Jaotatud juhtimismoodulite disain
Laialdaselt rakendatavate CJx-serie esitatud elektrilised juhtimismeetodid on disainitud integreeritud elektriliste ja mehaaniliste komponentidega, töötades väljaspool aastate jooksul fikseeritud konfiguratsioonis alates kasutuselevõtmisest. See integratsioon on oluline tegur nende kõrge vigade määra andmiseks. Mooduline disain katkestab selle kogu-väljakse seadme, jagades meetodit kaheks eraldi mooduliks: elektrilise juhtimismoodul ja mehaanilise juhtimismoodul.
Mooduline disain pakub selgeid eeliseid: see võimaldab elektrilise juhtimismooduli paigutada temperatuuristabiliseeritud keskkonda, millel on oluline mõju kõrgharvuliste lülitite lülitamisoperatsioonidele; ja see vähendab moodulite vahelist vedelikut, võimaldades kiiresti asendada vigaseid mooduleid - prioriteet "asenda-kohe, taasta-hiljem", et parandada hoolduse efektiivsust ja vähendada võrgu aeglast.
2.2.1 Elektrilise juhtimismoodul
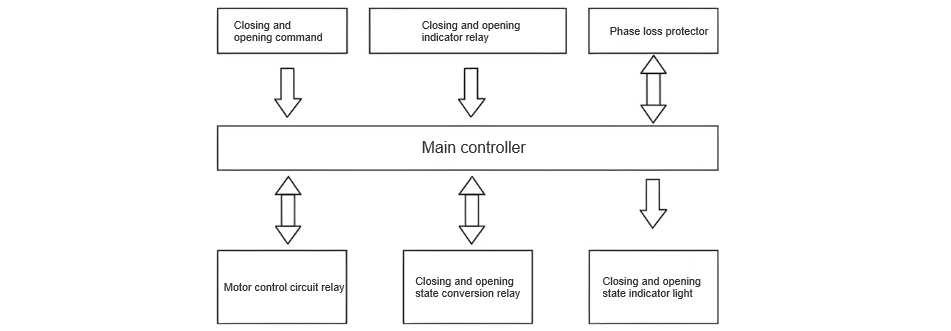
Elektrilise juhtimismoodul koosneb peamisest juhtimisest, avamise/suletamise ülemineku lülitajast, relidest, asukoha näitajaringidest ja faasisuuruse kaitsest, nagu on kirjeldatud Figure 3 disainikeeles.
Juhtimisloogika funktsioneerib järgmiselt: lülitussignaal (avamise/suletamise) nupust saatetakse juhtimisse, mis reguleerib mootori toimimist vastavalt käsklusele. Kui HVD on avatud olekus, aktiveeritakse avatud asukoha ring, millel tuleb näitaja. Suletamise nuppu vajutades käskib juhtimine põhimootori relid ja suletamise ülemineku relid, millest tuleb HVD suletama. Lõpetuseks deenergeeritakse mootori relay, aktiveerides suletatud asukoha ringi ja näitaja. Faasisuuruse kaitse kaitseb mootori ringi ajakella funktsiooniga, lahutades peamise ringi kindlal ajavahemikul vigade korral.
2.2.2 Mootori juhtimismoodul
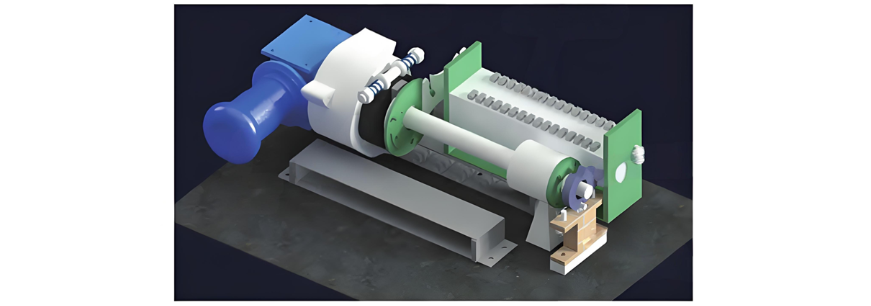
Mootori juhtimismoodul koosneb peamiselt AC-mootorist, kiirusvähendijast, tribolülitajast, Siemens' abilülitajast, thyristoril põhineva plahvveringi kaitsekringist, piirlülitajatest ja mehaanilisest lukustamisest. Kui peamine juhtimine saadab avamise/suletamise käsu, aktiveeritakse mootori juhtimisring, mis tahvelkiirusvähendija ja peamise telje kaudu mootoriga lülitamiseks. Piirlülitajad peamise telje ülaosas, koos mehaanilise lukustamise seadmega, kontrollivad lülitamise asukoha täpsust. Samas töötab Siemens' abilülitaja koos thyristoril põhineva plahvveringi kaitsekringiga, lahutades mootori juhtimisringi, peatades mootori toimimist. 90 kraadi pöörlemisraadius tahvelkiirusvähendija ja peamise telje ühenduse kaudu võimaldab mootori töödelda ladina. Mootori juhtimismooduli välimus on näidatud Figure 4-s.
2.3 Lahendus lülitaja suletamistäpsuse jaoks
Suletamine on kriitiline samm kõrgharvuliste lülitustesse. Ebasobiv suletamistäpsus võib mõjutada terve energiaüsteemi stabiilset toimimist. Elektrilise juhtimismeetodi avamise ja suletamistäpsuse täiustamiseks kasutab see disain mehaanilist lukustamisseadet, koos Siemens' abilülitajaga ja tribolülitajaga, et parandada täpsust mõnevõrra.
2.3.1 Siemens' abilülitaja ja thyristoril põhineva plahvveringi kaitsekring
Abilülitaja on ühendatud peamise mootori ringiga, et kontrollida mootori ringi sisse/lämmatamist. Abilülitaja ei ole vatsekas, kuna välise keskkonna mõju, ja selle sisemine tribo mehhanism takistab juhuslikke sülge. Kontaktid kasutavad veeretundlikku pinna ja kõva katta, et tagada stabiilne ja usaldusväärne ühendus. Spetsiifiline struktuur on näidatud Figure 6-s.

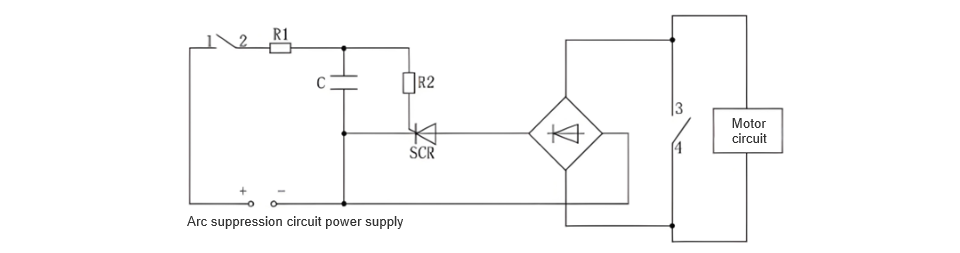
Thyristoril põhineva plahvveringi kaitsekringi disainiprinitsiip: Abilülitaja lahutamisel tekib plahvvering. Plahvvering ei saaks olla liiga suur ja kahjustada lülitajat, ühendatakse paralleelselt abilülitajaga thyristoril põhinev plahvveringi kaitsekring, et absorbida plahvvering. Spetsiifiline kringeri disain on näidatud Figure 7-s, kus kontaktid 1, 2, 3 ja 4 on kõik abilülitaja kontaktid. (Kontaktid 1 ja 2 kasutatakse thyristoril põhineva plahvveringi kaitsekringi sisse/lämmatamiseks, ja kontaktid 3 ja 4 kasutatakse peamise mootori ringi sisse/lämmatamiseks. On seatud, et kontaktid 1 ja 2 lahutatakse pärast kontaktide 3 ja 4, et saavutada plahvveringi kaitse eesmärk).
2.3.2 Tribolülitaja funktsioon
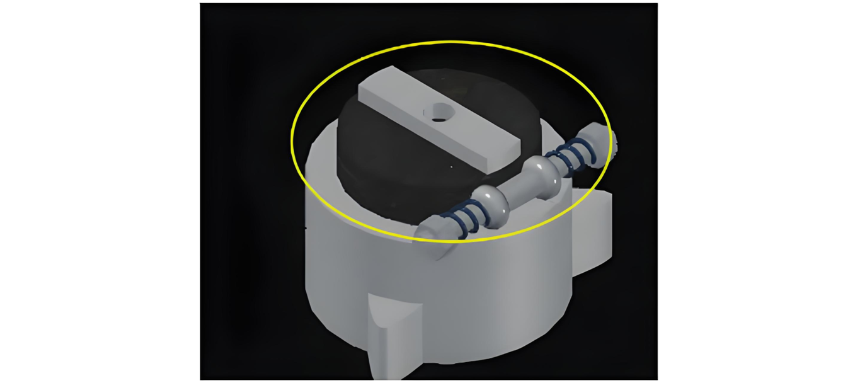
Tribolülitaja kaitseb mootorit igas ebakindlas toimimises. Kui kõrgharvuline lülitaja on paigas suletamise järel, kiiresti lahutatakse peamine mootori ring. Kuid mootor ei saa kohe peatuda mehaanilise pöördliikumise inertsiatunni tõttu. Sel hetkel toimib tribolülitaja jõud-vabaduskomponendina. See võimaldab tribolülitaja veeret vaba käigul, mille tulemusena mootori mehaaniline inertsiatunn laieneb ja tagab kõrgharvulise lülitaja täpse asukoha avamisel ja suletamisel. Lisaks, venitades veere tiivust, saab muuta tribolülitaja tiivust, et sobituks erinevate lülitajate avamise ja suletamise operatsioonidega. Tribolülitaja on näidatud Figure 8-s.
Disaini eelised CJx-tüübi elektriliste juhtimismeetodite suhtes
Esitatud disain eemaldab elektroonilisi komponente, nagu reisilülitajad ja piirilülitajad, vähendades ebastabiilsust ja parandades elektriliste juhtimismeetodite usaldusväärsust. See eemaldab kontaktidega varustatud terminalbloki, lihtsustades vedelikringi. Mooduline disainiga on vaid viis kaabeli, mis ühendavad kaks moodulit, oluliselt parandades vigade parandamise efektiivsust. Lisaks saab see moodustada mitmeid kaitsekihte termo-magnetiliste särklite ja olemasolevate elektrooniliste mootori kaitsevahenditega. Isegi kui elektriline juhtimisring viganeb, tagavad mehaaniline lukustamisseade ja tribolülitaja mootori ohutuse. Tribolülitaja vastandab mootori mehaanilise inertsiatundi, ja mehaaniline lukustamisseade takistab piirilülitaja "tagasi pommitamist", tagades kõrgharvulise lülitaja täpse avamise ja suletamise ning kaitstes selle täielikkust. Lisaks, mootori töödelda ladina vähendab algseks tööks vajalikku voolu, vältides seadme šokki ja pikendades juhtimismeetodi tööaega.
3 Eksperimentaarne verifitseerimine
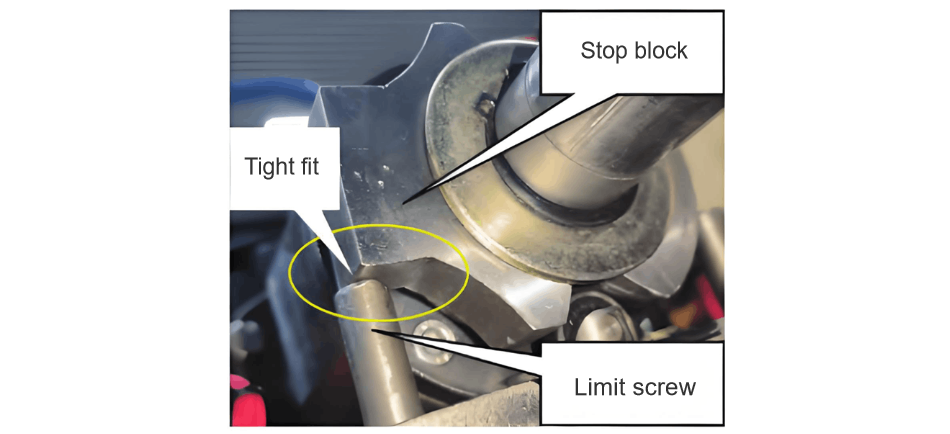
Järgides vastavaid standardeid, nagu "Kõrgharvulised AC lülitid ja maanduslülitid" ja "Üldised tehnilised nõuded kõrgharvuliste AC lülitustesse ja juhtimisseadmetesse", kombinatsioon mehaanilise lukustamisseadmega ja tribolülitajaga parandab veelgi lülitja avamise ja suletamise täpsust. CJx sarja elektriliste juhtimismeetoditega võrreldes pakub see kõrgharvuliste lülitite jaoks kõrgemat usaldusväärsust ja turvalisust. Veategevus, mitme avamise ja suletamise testimise ja limiitlüliti ja limiitpoltse vahelise nurga mittetäpsuse mõõtmise kaudu, näitab, et need on tihedalt ühildatud, tegeliku töötlemise viga 1° piires, täielikult vastavalt tehnoloogilistele standarditele. Tegelik asukoht on näidatud Figure 9-s.

4 Järeldus
Kuna üks võrgu olulisemaid seadmeid, on kõrgharvuliste lülitite juhtimismeetodite usaldusväärsus ja ohutus äärmiselt oluline. See artikkel võtab elektrilise juhtimismeetodi uuringuobjektina, teeb selle jaotatud juhtimismeetodite disaini ja analüüsi, ja verifitseerib selle eksperimentaalselt, saavutades oodatud tulemusi.Jaotatud juhtimiskeelde põhinevatel mootorit juhib peamine juhtimine, et ohutult ja täpselt kontrollida kõrgharvuliste lülitite avamist ja suletamist.
Mooduline disainiga on elektriline juhtimismeetod peamiselt jagatud elektrilise juhtimismooduliks ja mootori juhtimismooduliks, vähendades vedeliku keerukust ja parandades hoolduse kiirust.On seatud mehaaniline lukustamisseade. Koos Siemens' abilülitaja ja tribolülitaja eriliste struktuuridega on parandatud lülitja avamise ja suletamise täpsust.










