
Les interrupteurs de déconnexion haute tension (IDHT) sont des dispositifs de commutation critiques dans les réseaux électriques, principalement utilisés pour isoler les sources d'énergie en conjonction avec les disjoncteurs. Avec la proposition de "grilles numériques", l'avancement continu de la technologie des équipements de haute tension et l'expansion du réseau électrique chinois, les applications des IDHT ont augmenté en nombre et en diversité. Le mécanisme d'entraînement électrique, un composant essentiel contrôlant les mouvements de commutation des IDHT, exige une fiabilité et une stabilité exceptionnelles.
Les IDHT représentent un taux élevé de pannes parmi les équipements de haute tension, les mécanismes d'entraînement étant la cause principale des dysfonctionnements. Les pannes courantes des mécanismes d'entraînement incluent le refus de commutation, le dysfonctionnement opérationnel et l'ouverture/fermeture incomplète. Le dérapage du mécanisme d'entraînement - où le moteur continue de tourner - peut entraîner des coupures majeures dans les équipements du réseau. Parmi ces pannes, les échecs d'ouverture/fermeture (y compris le refus de commutation, l'opération incomplète et la faible précision de commutation) ont un impact significatif sur la stabilité du réseau.
Les recherches indiquent que les pannes des IDHT causées par les mécanismes d'entraînement électrique proviennent principalement de problèmes de circuits secondaires, tels que les pannes de contrôle dues à des composants électriques de mauvaise qualité ou des connexions lâches dans le circuit secondaire. Pour les mécanismes d'entraînement électrique de type CJx largement utilisés, les moteurs internes sont protégés par des disjoncteurs thermomagnétiques et des dispositifs de protection électronique du moteur. Exposés à l'extérieur pendant une longue période, ces mécanismes maintiennent leur posture opérationnelle pendant 3 à 6 ans après la mise en service, mais leurs composants de contrôle électrique sont fragiles et très sensibles aux facteurs environnementaux.
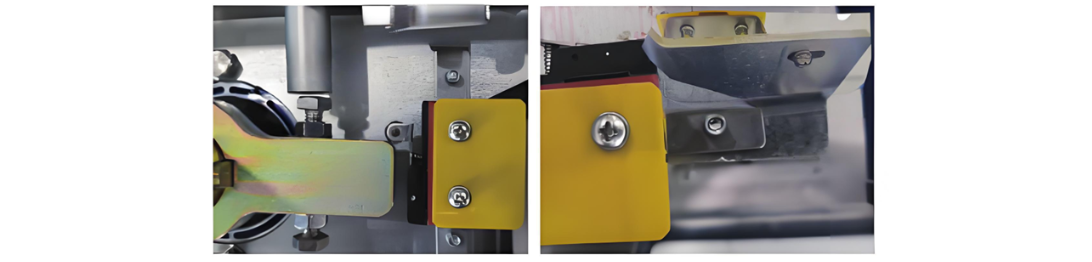
Le fonctionnement prolongé peut desserrer les interrupteurs de fin de course et les boulons, conduisant à une commutation incomplète si non détectée (par exemple, la déviation de position de 5° dans la Figure 1 pose des risques pour le réseau). Les interrupteurs de fin de course, cruciaux pour les transitions du processus de commutation, souffrent d'une oxydation des contacts et d'une durée de vie raccourcie en raison des influences environnementales.
En résumé, les causes principales des pannes d'ouverture/fermeture des interrupteurs de déconnexion haute tension (IDHT) peuvent être catégorisées en deux types : les pannes de circuit de commande électrique et les pannes de système mécanique. Cet article se concentre sur le circuit de commande électrique, qui comprend principalement les pannes de circuit moteur, les dysfonctionnements des interrupteurs de fin de course et les problèmes de circuit secondaire. L'analyse montre que les taux élevés de pannes de commutation sont principalement attribuables aux pannes de moteur et de circuit secondaire, affectant considérablement le fonctionnement des IDHT. Ainsi, résoudre la sécurité et la fiabilité des mécanismes d'entraînement des IDHT est urgent.
1. État des recherches sur les interrupteurs de déconnexion haute tension
Des chercheurs et ingénieurs pertinents ont mené des études approfondies sur les problèmes mentionnés ci-dessus et ont proposé des solutions constructives, résumées en deux aspects clés :
1.1 État des recherches sur les pannes de circuit secondaire
De nombreuses études ont abordé les problèmes de composants électriques dans les circuits secondaires. Une mauvaise étanchéité de la boîte du mécanisme d'entraînement permet l'intrusion d'eau de pluie, causant la corrosion des composants, la panne des interrupteurs/relais auxiliaires, les contacts bouton lâches et les blocages mécaniques - conduisant au refus de commutation ou à une opération incomplète. Les solutions proposées incluent l'entretien régulier, la protection contre l'humidité et des diagrammes de flux de défauts pour le dépannage rapide.
Pour l'usure mécanique telle que les broches déformées, les boulons de fin de course lâches ou les vis usées en raison de l'inertie du moteur, il est recommandé de procéder à des inspections fréquentes et à l'élimination opportune des défauts. Des matériaux anti-oxydation sont suggérés pour les jonctions de fil corrodées, tandis que des méthodes de test de tension/résistance aident à diagnostiquer les pannes de circuit secondaire - améliorées par le suivi des défauts pour améliorer l'efficacité du dépannage. Des dispositifs de chauffage ont été proposés pour résoudre les problèmes dus à l'humidité, tels que le décalage des interrupteurs auxiliaires et les contacts défectueux dans les mécanismes d'entraînement électrique.
Cependant, les études existantes ne font que lister les points de défaillance et souligner l'entretien sans solutions fondamentales, reflétant une attention faible aux circuits secondaires. Le personnel d'entretien sous-estime souvent les composants électriques par rapport aux parties mécaniques, et l'ignorance des structures/principes des composants secondaires - combinée à des inspections régulières négligées - sont des causes indirectes de pannes.
1.2 État des recherches sur les problèmes de précision de commutation
Pour améliorer la précision de commutation et l'inertie mécanique, les chercheurs ont amélioré le contrôle du moteur en concevant des mécanismes d'entraînement basés sur des moteurs à courant continu sans balai (BLDC) et des moteurs synchrones à aimants permanents (PMSM). Un mécanisme d'IDHT basé sur un BLDC avec un cœur DSP et une stratégie de double boucle fermée a montré une régulation efficace de la vitesse de commutation. Des méthodes similaires pour la surveillance en temps réel de la vitesse assurent une opération fluide et une amélioration de la précision de fermeture, jetant les bases du développement des réseaux intelligents. Il convient de noter que ces conceptions restent encore à l'étape de recherche théorique et de simulation en laboratoire, avec une fiabilité non prouvée dans les applications pratiques.
2 Schéma de conception de mécanisme d'entraînement électrique distribué
Sur la base de l'analyse ci-dessus, la cause principale des pannes des mécanismes d'entraînement est la faible fiabilité du circuit de commande électrique, qui est très sensible aux facteurs environnementaux. L'entretien retardé ou d'autres problèmes peuvent endommager les composants électriques, entraînant des pannes de commutation. En réponse, cet article propose une conception distribuée pour les mécanismes d'entraînement électrique.
2.1 Concept de contrôle distribué pour les mécanismes d'entraînement électrique
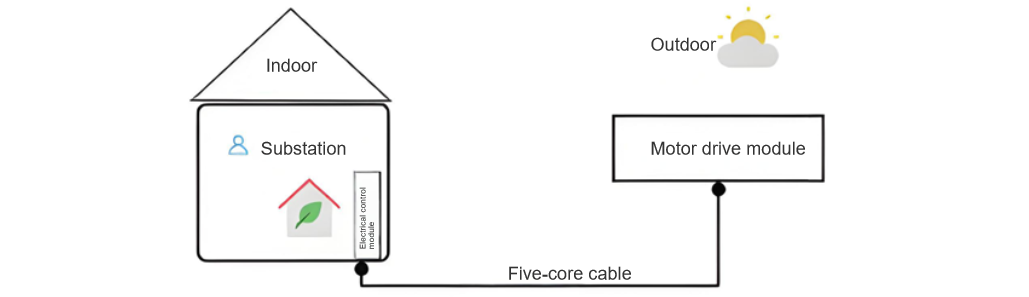
Le contrôle distribué divise l'ensemble du système en segments distincts, chacun contrôlé indépendamment par un contrôleur principal. Cette conception sépare le module de commande électrique du module d'entraînement du moteur :
Compte tenu de l'environnement extérieur variable et de la sensibilité des câbles, une stratégie de câble partagé en temps divisionnel est adoptée sur la base du principe TRIZ de multi-usages. Puisque les circuits de commande du moteur et les circuits indicateurs de statut de commutation n'ont pas besoin d'être activés simultanément, cette approche permet la transmission de signaux pour le contrôle du moteur et l'indication de la position de l'interrupteur de déconnexion en utilisant seulement 5 câbles. Cela réduit considérablement les impacts externes sur le mécanisme d'entraînement électrique. Le concept global de contrôle du mécanisme d'entraînement électrique distribué est illustré dans la Figure 2.
2.2 Conception des modules de contrôle distribué
Les mécanismes d'entraînement électrique de la série CJx largement appliqués sont conçus avec des composants électriques et mécaniques intégrés, fonctionnant en plein air toute l'année dans une configuration fixe depuis la mise en service. Cette intégration est un facteur clé contribuant à leur taux de panne élevé. La conception modulaire rompt cette configuration tout-en-un en divisant le mécanisme en deux modules distincts : un module de commande électrique et un module d'entraînement mécanique.
La conception modulaire offre des avantages distincts : elle permet au module de commande électrique d'être logé dans un environnement stabilisé en température, réduisant considérablement les impacts environnementaux sur les opérations de commutation des IDHT ; et elle minimise le câblage inter-module, permettant le remplacement rapide des modules défectueux - priorisant "remplacer d'abord, réparer ensuite" pour améliorer l'efficacité de l'entretien et réduire les temps d'arrêt du réseau.
2.2.1 Module de commande électrique
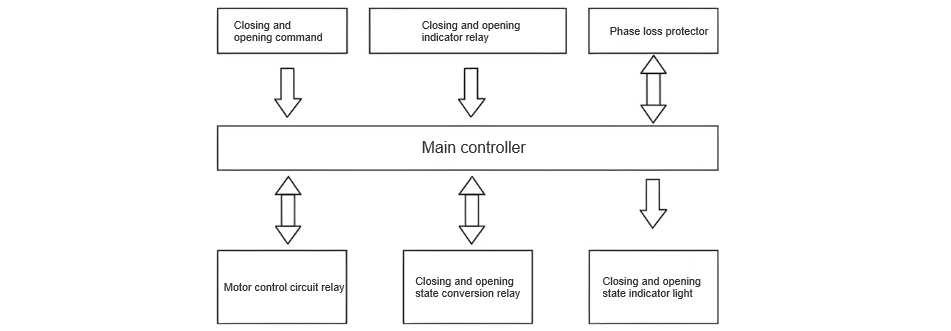
Le module de commande électrique comprend un contrôleur principal, un interrupteur de transfert ouvert/fermé, des relais, des circuits d'indication de position et un protecteur de phase manquante, comme décrit dans le concept de conception de la Figure 3.
La logique de commande fonctionne comme suit : un signal de commutation (ouvrir/fermer) provenant du bouton est envoyé au contrôleur, qui régule l'opération du moteur en fonction de la commande. Lorsque l'IDHT est en position ouverte, le circuit de position ouverte s'active, allumant l'indicateur. Appuyer sur le bouton de fermeture déclenche le contrôleur pour activer le relais principal du moteur et le relais de transfert de circuit fermé, entraînant la fermeture de l'IDHT. À la fin, le relais du moteur est désactivé, activant le circuit de position fermée et l'indicateur. Le protecteur de phase manquante protège le circuit du moteur avec une fonction de temporisation, déconnectant le circuit principal dans un délai spécifié en cas de panne.
2.2.2 Module d'entraînement du moteur
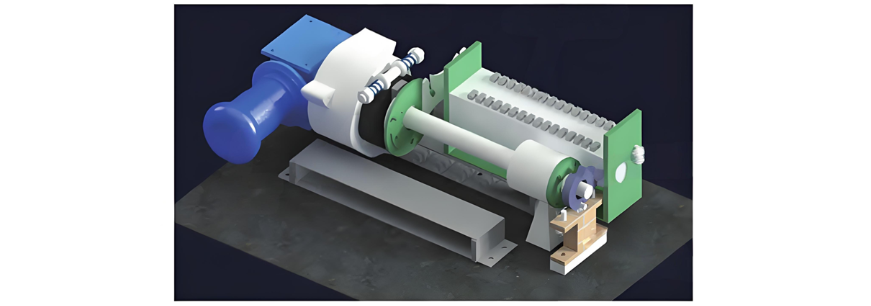
Le module d'entraînement du moteur se compose principalement d'un moteur à courant alternatif, d'un réducteur de vitesse, d'un coupleur à friction, d'un interrupteur auxiliaire Siemens, d'un circuit d'extinction d'arc thyristor, de butées de fin de course et d'un dispositif de verrouillage mécanique. Lorsque le contrôleur principal envoie une commande d'ouverture/fermeture, le circuit de commande du moteur est activé, entraînant le réducteur de vitesse et l'arbre principal via le moteur pour les opérations de commutation. Les butées de fin de course au sommet de l'arbre principal, en conjonction avec le dispositif de verrouillage mécanique, contrôlent la précision de la position de commutation. Pendant ce temps, l'interrupteur auxiliaire Siemens travaille avec le circuit d'extinction d'arc thyristor pour déconnecter le circuit de commande du moteur, arrêtant l'opération du moteur. Une marge de rotation de 90 degrés à la connexion entre le réducteur de vitesse et l'arbre principal permet un démarrage à vide du moteur. L'apparence du module d'entraînement du moteur est montrée dans la Figure 4.
2.3 Solution pour la précision de fermeture de l'interrupteur de déconnexion
L'action de fermeture est une étape cruciale pour les équipements de haute tension. Une précision de fermeture insuffisante peut affecter le fonctionnement stable de l'ensemble du système électrique. Pour améliorer davantage la précision d'ouverture et de fermeture du mécanisme d'entraînement électrique, cette conception utilise un dispositif de verrouillage mécanique, en conjonction avec un interrupteur auxiliaire Siemens et un coupleur à friction, pour améliorer la précision dans une certaine mesure.
2.3.1 Interrupteur auxiliaire Siemens et circuit d'extinction d'arc thyristor
L'interrupteur auxiliaire est connecté au circuit principal du moteur pour contrôler l'allumage/extinction du circuit du moteur. L'interrupteur auxiliaire n'est pas sujet à la rouille en raison des influences environnementales externes, et son mécanisme de friction interne empêche les fermetures accidentelles. Les contacts utilisent un ressort et une gaine rigide pour assurer des connexions stables et fiables. La structure spécifique est montrée dans la Figure 6.

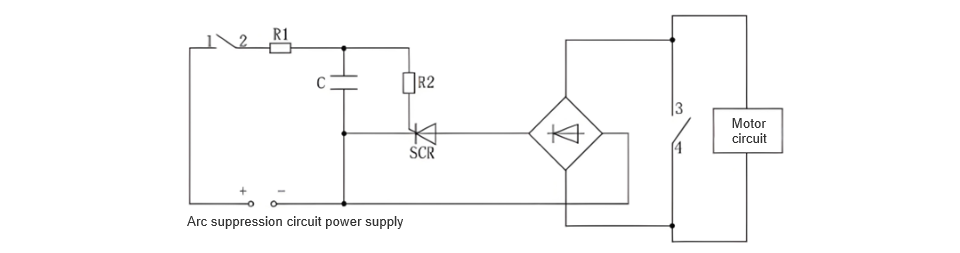
Principe de conception du circuit d'extinction d'arc thyristor : Lors de la déconnexion de l'interrupteur auxiliaire, un arc est généré. Pour éviter que l'arc ne soit trop grand et endommage l'interrupteur, un circuit d'extinction d'arc thyristor est connecté en parallèle avec l'interrupteur auxiliaire pour absorber l'arc. La conception spécifique du circuit est montrée dans la Figure 7, où les contacts 1, 2, 3 et 4 sont tous des contacts d'interrupteur auxiliaire. (Les contacts 1 et 2 sont utilisés pour contrôler l'allumage/extinction du circuit d'extinction d'arc thyristor, et les contacts 3 et 4 sont utilisés pour contrôler l'allumage/extinction du circuit principal du moteur. Il est prévu que les contacts 1 et 2 se déconnectent après les contacts 3 et 4 pour atteindre l'objectif d'extinction d'arc).
2.3.2 Fonction du coupleur à friction
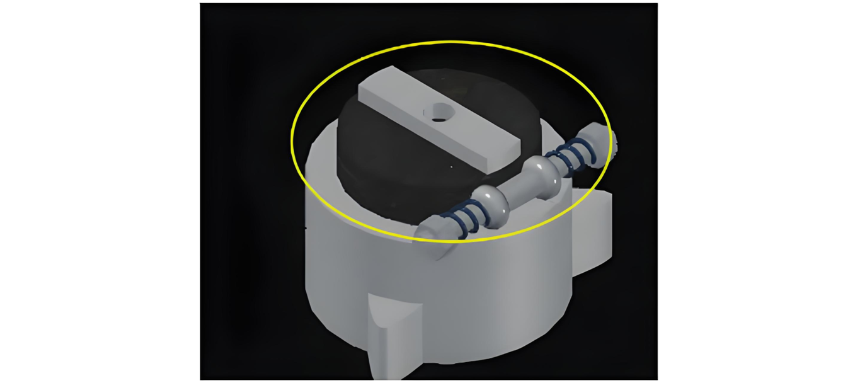
Le coupleur à friction protège le moteur dans toutes les conditions de fonctionnement anormales. Une fois que l'interrupteur de déconnexion haute tension est en place après la fermeture, le circuit principal du moteur est rapidement déconnecté. Cependant, en raison de l'inertie de rotation mécanique, le moteur ne peut pas s'arrêter immédiatement. À ce moment-là, le coupleur à friction agit comme un composant de décharge de force. Il permet à l'engrenage de friction de tourner à vide, dissipant l'inertie mécanique du moteur et assurant la position précise de l'interrupteur de déconnexion haute tension lors des opérations d'ouverture et de fermeture. De plus, en ajustant la tension du ressort, le couple de friction peut être modifié pour s'adapter aux opérations d'ouverture et de fermeture de divers interrupteurs de déconnexion. Le coupleur à friction est montré dans la Figure 8.
Avantages du schéma conçu par rapport aux mécanismes d'entraînement électrique de type CJx
La conception proposée élimine les composants électriques tels que les interrupteurs de fin de course et les butées de fin de course, réduisant les facteurs d'instabilité et améliorant la fiabilité du mécanisme d'entraînement électrique. Elle supprime également le bloc de bornes avec de nombreux contacts, simplifiant le circuit de câblage. Avec une conception modulaire, seuls cinq câbles relient les deux modules, améliorant considérablement l'efficacité de la réparation des pannes. De plus, elle peut former plusieurs couches de protection avec des disjoncteurs thermomagnétiques et des dispositifs de protection électronique du moteur existants. Même si le circuit de commande électrique tombe en panne, le dispositif de verrouillage mécanique et le coupleur à friction assurent la sécurité du moteur. Le coupleur à friction compense la force due à l'inertie mécanique du moteur, et le dispositif de verrouillage mécanique empêche la butée de fin de course de "rebondir", assurant une ouverture et une fermeture précises de l'interrupteur de déconnexion haute tension et protégeant son intégrité. De plus, le démarrage à vide du moteur minimise le courant de démarrage, évitant les chocs sur l'équipement et prolongeant la durée de vie du mécanisme d'entraînement.
3 Vérification expérimentale
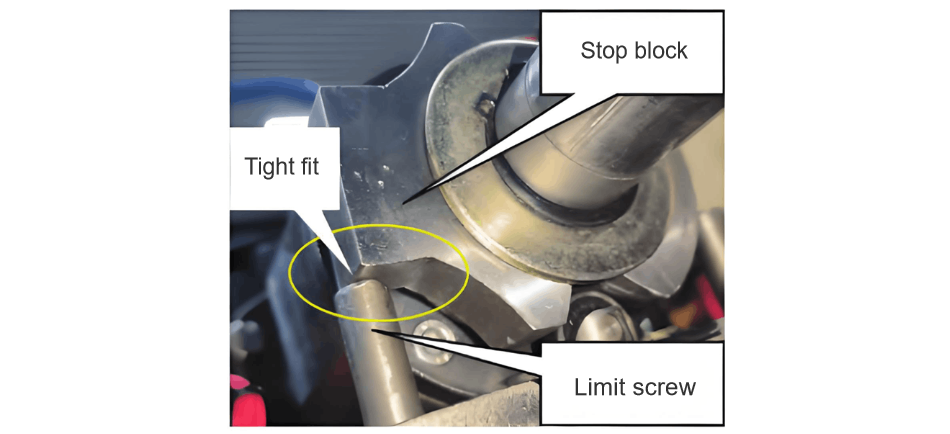
Conformément aux normes pertinentes telles que "Interrupteurs de déconnexion et de terre haute tension à courant alternatif" et "Exigences techniques communes pour les équipements de haute tension à courant alternatif", la combinaison d'un dispositif de verrouillage mécanique et d'un coupleur à friction améliore davantage la précision d'ouverture et de fermeture de l'interrupteur de déconnexion. Comparé aux mécanismes d'entraînement électrique de la série CJx, il offre une plus grande fiabilité et sécurité. La détection d'erreurs, par le biais de multiples tests d'ouverture et de fermeture et de mesures de déviation angulaire entre la butée de fin de course et la vis de fin de course, montre qu'ils sont étroitement alignés, avec une erreur de fabrication réelle inférieure à 1°, répondant pleinement aux normes technologiques. La position réelle est montrée dans la Figure 9.

4 Conclusion
En tant qu'un des équipements clés du réseau électrique, la fiabilité et la sécurité du mécanisme d'entraînement des interrupteurs de déconnexion haute tension sont d'une importance capitale. Cet article prend le mécanisme d'entraînement électrique comme objet de recherche, effectue une conception et une analyse détaillées de sa méthode de contrôle distribué, et le vérifie par des expériences, obtenant les résultats escomptés.Sur la base du concept de contrôle distribué, le moteur est piloté par le contrôleur principal pour contrôler en toute sécurité et avec précision les opérations d'ouverture et de fermeture des interrupteurs de déconnexion haute tension.
Avec une approche de conception modulaire, le mécanisme d'entraînement électrique est principalement divisé en un module de commande électrique et un module d'entraînement du moteur, réduisant la complexité du câblage et améliorant la vitesse de maintenance.Un dispositif de verrouillage mécanique est mis en place. Combiné aux structures spéciales de l'interrupteur auxiliaire Siemens et du coupleur à friction, la précision d'ouverture et de fermeture de l'interrupteur de déconnexion a été améliorée.










