
سوئیچهای جداکننده ولتاژ بالا (HVDs) دستگاههای کلیدی در شبکههای برق هستند که اساساً برای جداسازی منابع تغذیه در همراهی با شیرکنندهها استفاده میشوند. با پیشنهاد "شبکههای دیجیتال"، پیشرفتهای مداوم در فناوری سوئیچهای ولتاژ بالا و گسترش شبکه برق چین، کاربردهای HVD در هر دو جنبه کمیت و تنوع افزایش یافته است. مکانیسم عملیات الکتریکی، مؤلفه حیاتی کنترل حرکات HVD، نیاز به قابلیت اطمینان و ثبات بسیار بالا دارد.
HVDs نسبت به تجهیزات ولتاژ بالا دارای نرخ خرابی بالایی هستند و مکانیسمهای عملیاتی عامل اصلی خرابیها هستند. خرابیهای رایج مکانیسمهای عملیاتی شامل عدم واکنش در تغییر وضعیت، خرابی عملکرد و باز شدن/بسته شدن ناقص هستند. گریز مکانیسم عملیاتی-که در آن موتور ادامه مییابد- میتواند منجر به قطع بزرگ برق در تجهیزات شبکه شود. در میان اینها، خرابیهای باز شدن/بسته شدن (شامل عدم واکنش در تغییر وضعیت، عملکرد ناقص و دقت کم در تغییر وضعیت) تأثیر زیادی بر پایداری شبکه دارد.
تحقیقات نشان میدهد که خرابیهای HVD ناشی از مکانیسمهای عملیاتی الکتریکی عمدتاً از مشکلات مدار ثانویه ناشی میشوند، مانند خرابی کنترل به دلیل اجزای الکتریکی کیفیت پایین یا اتصالات ضعیف در مدار ثانویه. برای مکانیسمهای عملیاتی الکتریکی CJx-نوع معمول، موتورهای داخلی توسط شیرکنندههای حرارتی-مغناطیسی و دستگاههای محافظ موتور الکترونیکی محافظت میشوند. این مکانیسمها که طولانیمدت در محیط باز قرار دارند، بعد از راهاندازی ۳-۶ سال در حالت عملیاتی حفظ میشوند، اما اجزای کنترل الکتریکی آنها لاغر و بسیار حساس به عوامل محیطی هستند.
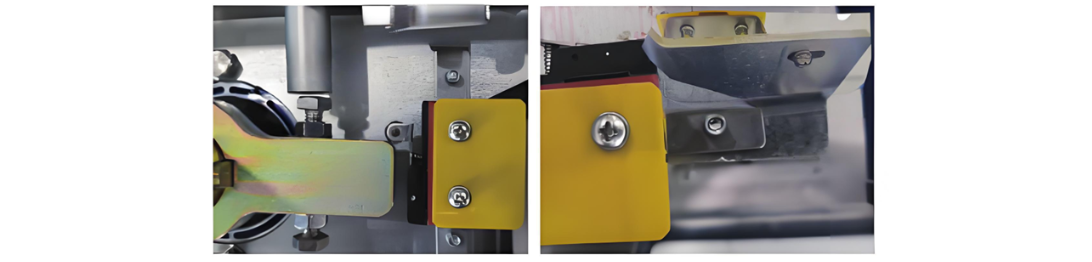
عملیات طولانی میتواند باعث انحلال سوئیچهای محدود و پیچهای بسته شدن شود که اگر شناسایی نشود، میتواند باز شدن/بسته شدن ناقص را به وجود آورد (به عنوان مثال، انحراف موقعیت ۵ درجه در شکل ۱ خطراتی برای شبکه ایجاد میکند). سوئیچهای سفر، که برای تغییرات در فرآیند تغییر وضعیت مهم هستند، به دلیل تأثیرات محیطی دارای تماسهای اکسید شده و عمر کوتاهتر هستند.
در خلاصه، علل اصلی خرابیهای باز شدن/بسته شدن سوئیچهای جداکننده ولتاژ بالا (HVD) میتوانند به دو نوع تقسیم شوند: خرابیهای مدار کنترل الکتریکی و خرابیهای سیستم مکانیکی. این مقاله بر روی مدار کنترل الکتریکی تمرکز دارد که عمدتاً شامل خرابیهای مدار موتور، خرابیهای سوئیچ محدود و مشکلات مدار ثانویه است. تحلیل نشان میدهد که نرخ بالای خرابیهای تغییر وضعیت عمدتاً به خاطر خرابیهای موتور و مدار ثانویه است که تأثیر قابل توجهی بر عملکرد HVD دارد. بنابراین، حل امنیت و قابلیت اطمینان مکانیسمهای عملیاتی HVD امری ضروری است.
1. وضعیت تحقیقات درباره سوئیچهای جداکننده ولتاژ بالا
پژوهشگران و مهندسان مربوطه مطالعات گستردهای درباره مسائل فوق انجام داده و راهحلهای سازندهای پیشنهاد کردهاند که در دو جنبه کلیدی خلاصه میشود:
1.1 وضعیت تحقیقات درباره خرابیهای مدار ثانویه
بسیاری از مطالعات به مسائل اجزای الکتریکی در مدار ثانویه پرداختهاند. ختمبندی ضعیف جعبه مکانیسم عملیاتی اجازه ورود آب باران را میدهد که منجر به فرسودگی اجزا، خرابی سوئیچ/رеле کمکی، تماسهای پیچ ضعیف و جمود مکانیکی میشود-که منجر به عدم واکنش در تغییر وضعیت یا عملکرد ناقص میشود. راهحلهای پیشنهادی شامل نگهداری منظم، محافظت از رطوبت و نمودار جریان خطا برای رفع سریع مشکلات است.
برای فرسودگی مکانیکی مانند تغییر شکل پینها، پیچهای محدود ضعیف یا فرسودگی پیچها به دلیل لختی موتور، توصیه میشود اقداماتی مانند بازرسیهای مکرر و رفع تکهای تکهای تخلفات انجام شود. مواد ضد اکسید برای اتصالات سیمهای فرسوده پیشنهاد شدهاند، در حالی که روشهای تست ولتاژ/مقاومت کمک میکنند به تشخیص خرابیهای مدار ثانویه-که با ثبت تخلفات بهبود مییابد. دستگاههای گرمکن برای مقابله با مشکلات ناشی از رطوبت مانند تغییر موقعیت سوئیچ کمکی و تماس ضعیف در مکانیسمهای عملیاتی الکتریکی پیشنهاد شدهاند.
با این حال، مطالعات موجود فقط نقاط خرابی را فهرست میکنند و بر نگهداری تأکید میکنند بدون راهحلهای بنیادی، که نشاندهنده توجه کم به مدار ثانویه است. کارکنان نگهداری اغلب اجزای الکتریکی را نسبت به اجزای مکانیکی کمارزش میدانند، و ناآشنایی با ساختار/اصول اجزای ثانویه-که با نادیده گرفتن بازرسیهای منظم ترکیب میشود-علل غیرمستقیم خرابیها هستند.
1.2 وضعیت تحقیقات درباره مسائل دقت تغییر وضعیت
برای حل مسائل دقت تغییر وضعیت و لختی مکانیکی، دانشمندان با طراحی مکانیسمهای عملیاتی موتور DC بدونブラシ (BLDC) および永久磁铁同步电机(PMSM)来提高电动操作机构的开关精度。基于DSP核心和双闭环控制策略的BLDC型HVD机构已显示出有效的开关速度调节。类似的方法用于实时速度监控,确保平稳运行并提高闭合精度,为智能电网的发展奠定了基础。值得注意的是,这些设计仍处于理论研究和实验室模拟阶段,在实际应用中的可靠性尚未得到验证。
2 分布式电动操作机构设计方案
基于上述分析,操作机构故障的主要原因是电气控制电路的可靠性差,极易受到环境因素的影响。维护延迟或其他问题会损坏电气组件,导致开关故障。为此,本文提出了一种分布式电动操作机构的设计方案。
2.1 电动操作机构的分布式控制概念
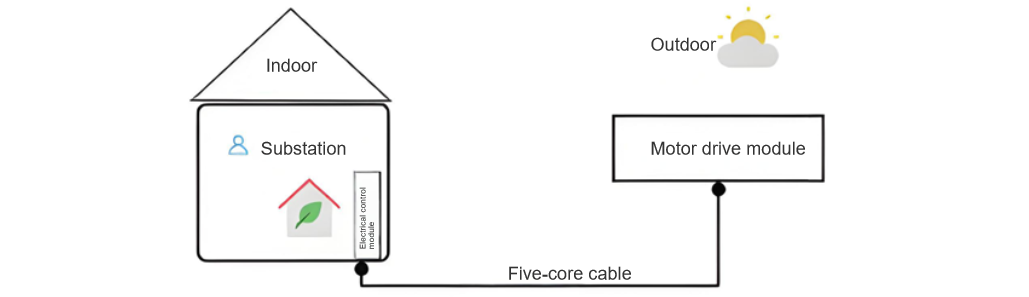
分布式控制将整个系统划分为独立的部分,每个部分由主控制器独立控制。这种设计将电气控制模块与电机驱动模块分开:
考虑到室外环境的多变性和电缆的易受性,基于TRIZ的多功能原理,采用时分共享电缆策略。由于电机控制电路和开关状态指示电路不需要同时激活,这种方法仅使用5根电缆即可实现电机控制信号和隔离开关位置指示信号的传输。这显著减少了外部环境对电动操作机构的影响。分布式电动操作机构的整体控制概念如图2所示。
2.2 分布式控制模块的设计
广泛使用的CJx系列电动操作机构集成了电气和机械部件,自投入使用以来一直以固定配置全年在户外运行。这种集成是其高故障率的关键因素之一。模块化设计打破了这种一体式的户外设置,将机构分为两个独立的模块:电气控制模块和机械驱动模块。
模块化设计具有明显的优势:它允许电气控制模块置于温度稳定的环境中,显著减少环境对HVD开关操作的影响;并且最小化模块间的接线,使故障模块能够快速更换——优先“先更换后维修”,以提高维护效率并减少电网停机时间。
2.2.1 电气控制模块
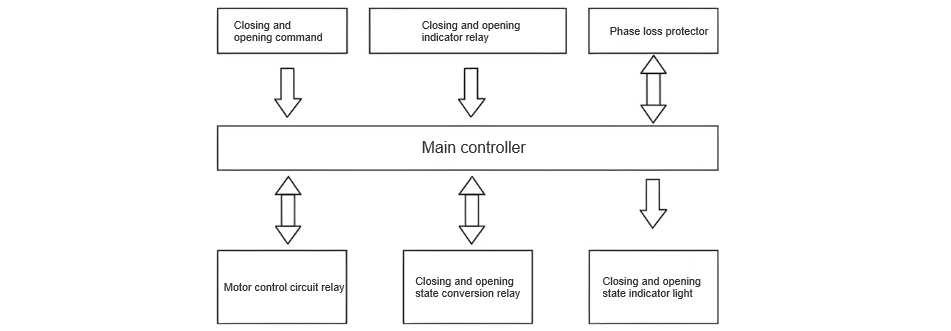
电气控制模块包括主控制器、开/关转换开关、继电器、位置指示电路和缺相保护器,如图3所示。
控制逻辑功能如下:来自按钮的开关信号(开/关)发送到控制器,控制器根据命令调节电机操作。当HVD处于开状态时,开位置电路激活,点亮指示灯。按下关闭按钮触发控制器接通主电机继电器和闭合电路转换继电器,驱动HVD闭合。完成后,电机继电器断电,激活闭合位置电路和指示灯。缺相保护器通过定时功能保护电机电路,在发生故障时在指定时间内断开主电路。
2.2.2 电机驱动模块
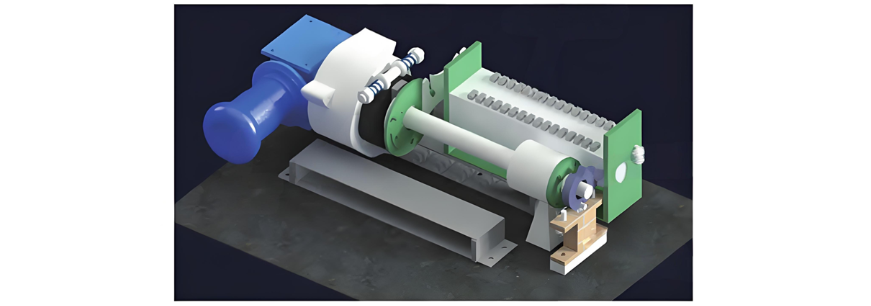
电机驱动模块主要由交流电机、减速器、摩擦耦合器、西门子辅助开关、晶闸管灭弧电路、限位挡块和机械锁定装置组成。当主控制器发送开/关命令时,电机控制电路被激活,通过电机驱动减速器和主轴进行开关操作。主轴顶部的限位挡块与机械锁定装置配合,控制开关位置精度。同时,西门子辅助开关与晶闸管灭弧电路配合,断开电机控制电路,停止电机运行。减速器与主轴之间的90度旋转余量使电机能够空载启动。电机驱动模块的外观如图4所示。
2.3 隔离开关闭合精度解决方案
闭合动作是高压开关设备的关键步骤。闭合精度不足会影响整个电力系统的稳定运行。为了进一步提高电动操作机构的开闭精度,本设计采用了机械锁定装置,结合西门子辅助开关和摩擦耦合器,一定程度上提高了精度。
2.3.1 西门子辅助开关和晶闸管灭弧电路
辅助开关连接到主电机电路,控制电机电路的通断。辅助开关不易因外部环境影响而生锈,其内部摩擦机制防止意外闭合。触点采用弹簧销和硬套管,确保稳定可靠的连接。具体结构如图6所示。

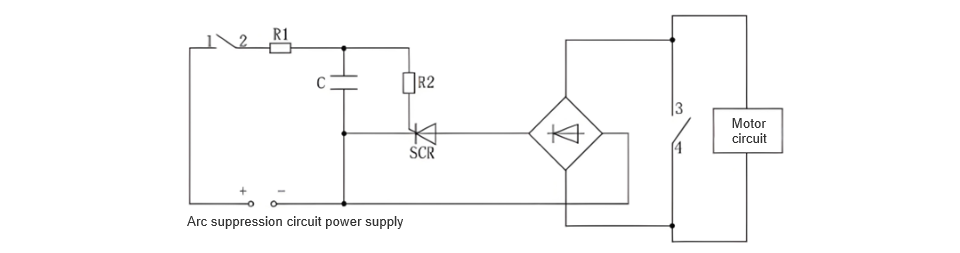
晶闸管灭弧电路的设计原理:在辅助开关断开时会产生电弧。为了防止电弧过大损坏开关,晶闸管灭弧电路与辅助开关并联,吸收电弧。具体的电路设计如图7所示,其中触点1、2、3和4都是辅助开关触点。(触点1和2用于控制晶闸管灭弧电路的通断,触点3和4用于控制主电机电路的通断。设定触点1和2在触点3和4之后断开,以达到灭弧的目的)。
2.3.2 摩擦耦合器的功能
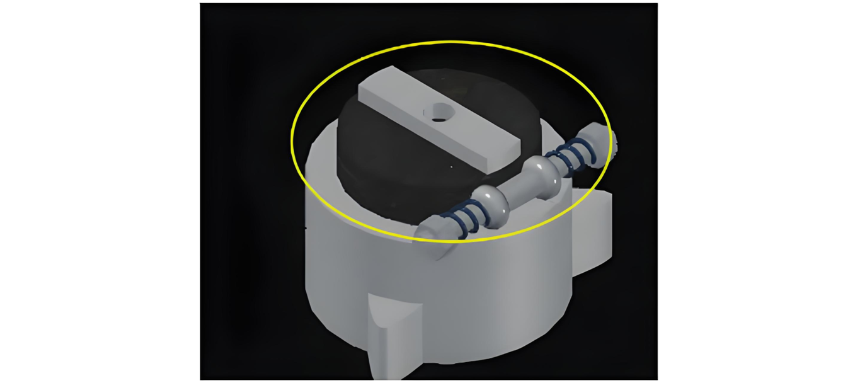
摩擦耦合器在任何异常工作条件下保护电机。一旦高压隔离开关闭合到位,主电机电路迅速断开。然而,由于机械转动惯性,电机不能立即停止。此时,摩擦耦合器作为卸力组件发挥作用。它使摩擦齿轮空转,耗散电机的机械惯性,确保高压隔离开关在开闭操作中的精确定位。此外,通过调整弹簧的紧度,可以改变摩擦扭矩,以适应各种隔离开关的开闭操作。摩擦耦合器如图8所示。
所设计方案相对于CJx型电动操作机构的优势
所提出的方案消除了行程开关和限位开关等电气组件,减少了不稳定因素,提高了电动操作机构的可靠性。它还去掉了带有许多触点的端子排,简化了接线电路。采用模块化设计,只有五根电缆连接两个模块,大大提高了故障修复效率。此外,它可以与热磁断路器和现有的电子电机保护装置形成多层保护。即使电气控制电路出现故障,机械锁定装置和摩擦耦合器也能确保电机安全。摩擦耦合器抵消了电机机械惯性的力,机械锁定装置防止限位挡块“反弹”,确保高压隔离开关的精确开闭,并保护其完整性。此外,电机的空载启动最小化了启动电流,避免了设备冲击,延长了操作机构的使用寿命。
3 实验验证
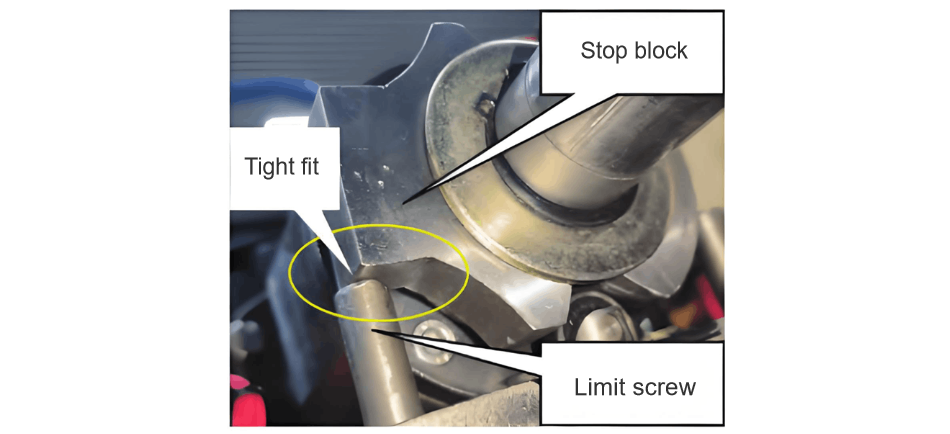
遵循相关标准,如“高压交流隔离开关和接地开关”以及“高压交流开关设备和控制设备的通用技术要求”,结合机械锁定装置和摩擦耦合器进一步提高了隔离开关的开闭精度。与CJx系列电动操作机构相比,它提供了更高的可靠性和安全性。通过多次开闭测试和限位挡块与限位螺钉之间的角度偏差测量,发现它们紧密对齐,实际加工误差在1°以内,完全符合技术标准。实际位置如图9所示。

4 结论
作为电网中的关键设备之一,高压隔离开关操作机构的可靠性和安全性至关重要。本文以电动操作机构为研究对象,对其分布式控制方法进行了详细设计和分析,并通过实验进行了验证,达到了预期效果。基于分布式控制的概念,电机由主控制器驱动,安全准确地控制高压隔离开关的开闭操作。
采用模块化设计方法,电动操作机构主要分为电气控制模块和电机驱动模块,减少了接线复杂性,提高了维护速度。设置了机械锁定装置。结合西门子辅助开关和摩擦耦合器的特殊结构,提高了隔离开关的开闭精度。










