
Saklar pemutus tegangan tinggi (HVD) adalah perangkat pengalihan kritis dalam jaringan listrik, yang utamanya digunakan untuk mengisolasi sumber daya bersama dengan pemutus sirkuit. Dengan usulan "jaringan digital", kemajuan berkelanjutan dalam teknologi peralatan pemutus tegangan tinggi, dan ekspansi jaringan listrik China, aplikasi HVD telah meningkat baik dari segi jumlah maupun keragaman. Mekanisme operasional listrik, komponen penting yang mengontrol gerakan beralih HVD, menuntut keandalan dan stabilitas luar biasa.
HVD menyumbang tingginya tingkat kegagalan di antara peralatan tegangan tinggi, dengan mekanisme operasional menjadi penyebab utama kerusakan. Kegagalan umum pada mekanisme operasional meliputi penolakan beralih, kegagalan operasional, dan pembukaan/tutupan tidak lengkap. Lari bebas mekanisme operasional—di mana motor terus berjalan—dapat menyebabkan pemadaman listrik besar-besaran pada peralatan jaringan. Di antaranya, kegagalan pembukaan/tutupan (termasuk penolakan beralih, operasi tidak lengkap, dan akurasi beralih rendah) sangat mempengaruhi stabilitas jaringan.
Penelitian menunjukkan bahwa kegagalan HVD yang disebabkan oleh mekanisme operasional listrik sebagian besar berasal dari masalah rangkaian sekunder, seperti kegagalan kontrol karena komponen listrik berkualitas buruk atau sambungan longgar di rangkaian sekunder. Untuk mekanisme operasional listrik tipe CJx yang luas digunakan, motor internal dilindungi oleh pemutus sirkuit termomagnetik dan perangkat pelindung motor elektronik. Terpapar lama di luar ruangan, mekanisme ini mempertahankan postur operasional selama 3-6 tahun setelah pemasangan, tetapi komponen kontrol listriknya rapuh dan sangat rentan terhadap faktor lingkungan.
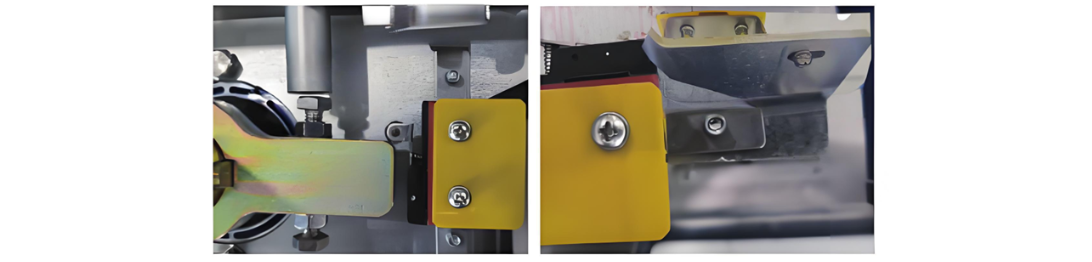
Operasi jangka panjang dapat melonggarkan saklar batas dan baut, menyebabkan beralih tidak lengkap jika tidak terdeteksi (misalnya, penyimpangan posisi 5° pada Gambar 1 menimbulkan risiko jaringan). Saklar perjalanan, yang penting untuk transisi proses beralih, menderita kontak yang teroksidasi dan umur yang pendek karena pengaruh lingkungan.
Secara ringkas, penyebab utama kegagalan pembukaan/tutupan saklar pemutus tegangan tinggi (HVD) dapat dikategorikan menjadi dua jenis: kegagalan rangkaian kontrol listrik dan kegagalan sistem mekanis. Makalah ini fokus pada rangkaian kontrol listrik, yang terutama mencakup kegagalan rangkaian motor, kegagalan saklar batas, dan masalah rangkaian sekunder. Analisis menunjukkan bahwa tingginya tingkat kegagalan beralih sebagian besar disebabkan oleh kegagalan motor dan rangkaian sekunder, yang secara signifikan mempengaruhi operasi HVD. Oleh karena itu, penyelesaian keamanan dan keandalan mekanisme operasional HVD sangat mendesak.
1. Status Penelitian tentang Saklar Pemutus Tegangan Tinggi
Para peneliti dan insinyur yang relevan telah melakukan studi luas tentang isu-isu di atas dan mengusulkan solusi konstruktif, yang diringkas dalam dua aspek kunci:
1.1 Status Penelitian tentang Kegagalan Rangkaian Sekunder
Banyak studi telah menangani masalah komponen listrik dalam rangkaian sekunder. Penyegelan yang buruk pada kotak mekanisme operasional memungkinkan air hujan masuk, menyebabkan korosi komponen, kegagalan saklar/relai bantu, kontak tombol longgar, dan macet mekanis—menyebabkan penolakan beralih atau operasi tidak lengkap. Solusi yang diusulkan termasuk pemeliharaan rutin, perlindungan kelembaban, dan diagram alir kesalahan untuk pemecahan masalah cepat.
Untuk aus mekanis seperti pin yang bengkok, baut batas yang longgar, atau sekrup yang aus karena inersia motor, dianjurkan langkah-langkah seperti pemeriksaan sering dan eliminasi cacat tepat waktu. Bahan antioksidasi disarankan untuk sambungan kawat yang berkarat, sementara metode pengujian tegangan/resistansi membantu mendiagnosis kegagalan rangkaian sekunder—ditingkatkan dengan pencatatan cacat untuk meningkatkan efisiensi pemecahan masalah. Perangkat pemanas telah diusulkan untuk mengatasi masalah kelembaban seperti misalignment saklar bantu dan kontak buruk dalam mekanisme operasional listrik.
Namun, studi yang ada hanya mendaftar titik-titik kesalahan dan menekankan pemeliharaan tanpa solusi fundamental, mencerminkan perhatian rendah terhadap rangkaian sekunder. Personel pemeliharaan sering meremehkan komponen listrik dibandingkan dengan bagian mekanis, dan ketidakfamiliaran dengan struktur/prinsip komponen sekunder—ditambah dengan pengabaian pemeriksaan rutin—merupakan penyebab tidak langsung kegagalan.
1.2 Status Penelitian tentang Masalah Akurasi Beralih
Untuk mengatasi akurasi beralih dan inersia mekanis, para cendekiawan telah meningkatkan kontrol motor dengan merancang mekanisme operasional motor DC tanpa sikat (BLDC) dan motor sinkron magnet permanen (PMSM). Mekanisme HVD berbasis BLDC dengan inti DSP dan strategi kontrol tertutup ganda telah menunjukkan regulasi kecepatan beralih yang efektif. Metode serupa untuk pemantauan kecepatan real-time memastikan operasi lancar dan peningkatan akurasi tutup, membentuk dasar untuk pengembangan jaringan pintar. Perlu dicatat, desain-desain ini masih berada dalam tahap penelitian teoretis dan simulasi laboratorium, dengan keandalan yang belum terbukti dalam aplikasi praktis.
2 Skema Desain Mekanisme Operasional Listrik Terdistribusi
Berdasarkan analisis di atas, penyebab utama kegagalan mekanisme operasional adalah keandalan rendah dari rangkaian kontrol listrik, yang sangat rentan terhadap faktor lingkungan. Pemeliharaan yang tertunda atau masalah lainnya dapat merusak komponen listrik, menyebabkan kegagalan beralih. Sebagai respons, makalah ini mengusulkan desain terdistribusi untuk mekanisme operasional listrik.
2.1 Konsep Kontrol Terdistribusi untuk Mekanisme Operasional Listrik
Kontrol terdistribusi membagi seluruh sistem menjadi segmen-segmen terpisah, masing-masing dikontrol secara independen oleh kontroler utama. Desain ini memisahkan modul kontrol listrik dari modul penggerak motor:
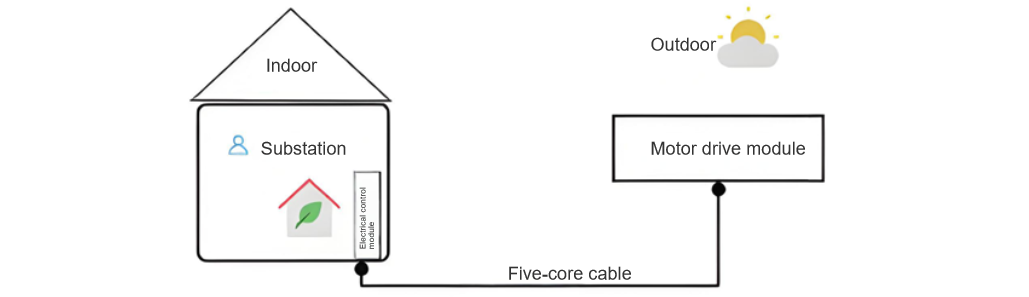
Mengingat lingkungan luar yang bervariasi dan kabel yang rentan, strategi kabel berbagi waktu diadopsi berdasarkan prinsip TRIZ multi-penggunaan. Karena rangkaian kontrol motor dan rangkaian indikator status beralih tidak perlu diaktifkan secara bersamaan, pendekatan ini memungkinkan transmisi sinyal untuk kontrol motor dan indikasi posisi saklar pemutus menggunakan hanya 5 kabel. Ini secara signifikan mengurangi dampak lingkungan eksternal terhadap mekanisme operasional listrik. Konsep kontrol keseluruhan mekanisme operasional listrik terdistribusi ditunjukkan dalam Gambar 2.
2.2 Desain Modul Kontrol Terdistribusi
Mekanisme operasional listrik seri CJx yang luas digunakan dirancang dengan integrasi komponen listrik dan mekanis, beroperasi di luar ruangan sepanjang tahun dalam konfigurasi tetap sejak pemasangan. Integrasi ini merupakan faktor kunci yang berkontribusi pada tingginya tingkat kegagalan. Desain modular mengganggu setup outdoor all-in-one ini dengan membagi mekanisme menjadi dua modul terpisah: modul kontrol listrik dan modul penggerak mekanis.
Desain modular menawarkan keuntungan yang jelas: memungkinkan modul kontrol listrik ditempatkan di lingkungan dengan suhu stabil, secara signifikan mengurangi dampak lingkungan pada operasi beralih HVD; dan meminimalkan kabel antar-modul, memungkinkan penggantian cepat modul yang rusak—memprioritaskan "ganti-dulu, perbaiki-kemudian" untuk meningkatkan efisiensi pemeliharaan dan mengurangi downtime jaringan.
2.2.1 Modul Kontrol Listrik
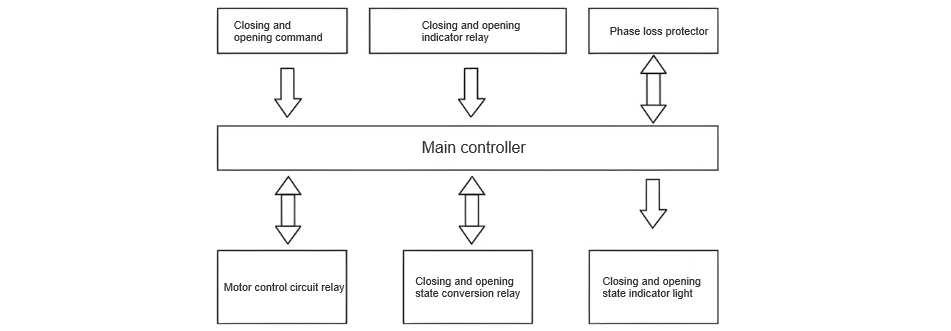
Modul kontrol listrik terdiri dari kontroler utama, saklar transfer buka/tutup, relai, rangkaian indikasi posisi, dan pelindung fase hilang, sesuai dengan konsep desain dalam Gambar 3.
Logika kontrol berfungsi sebagai berikut: sinyal beralih (buka/tutup) dari tombol dikirim ke kontroler, yang mengatur operasi motor berdasarkan perintah. Ketika HVD dalam keadaan terbuka, rangkaian posisi terbuka aktif, menerangi indikator. Menekan tombol tutup memicu kontroler untuk mengaktifkan relai motor utama dan relai transfer rangkaian tutup, menggerakkan HVD untuk menutup. Setelah selesai, relai motor mati, mengaktifkan rangkaian posisi tutup dan indikator. Pelindung fase hilang melindungi rangkaian motor dengan fungsi timer, memutus rangkaian utama dalam jangka waktu tertentu jika terjadi gangguan.
2.2.2 Modul Penggerak Motor
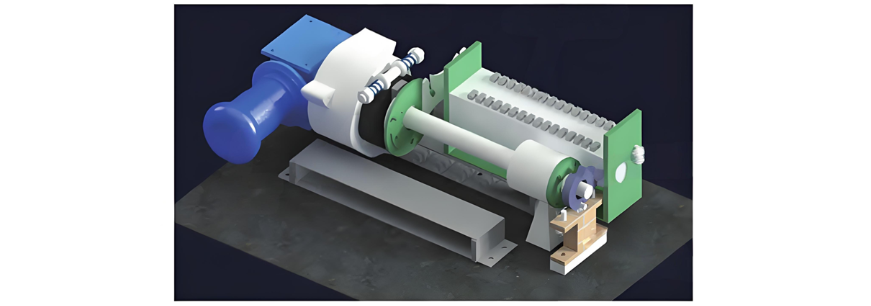
Modul penggerak motor terutama terdiri dari motor AC, pengurang kecepatan, kopling gesek, saklar bantu Siemens, rangkaian pemadam busur thyristor, stop batas, dan perangkat penguncian mekanis. Ketika kontroler utama mengirim perintah buka/tutup, rangkaian kontrol motor diaktifkan, menggerakkan pengurang kecepatan dan poros utama melalui motor untuk operasi beralih. Stop batas di bagian atas poros utama, bersama dengan perangkat penguncian mekanis, mengontrol akurasi posisi beralih. Sementara itu, saklar bantu Siemens bekerja dengan rangkaian pemadam busur thyristor untuk memutus rangkaian kontrol motor, menghentikan operasi motor. Margin rotasi 90 derajat di sambungan antara pengurang kecepatan dan poros utama memungkinkan motor untuk mulai tanpa beban. Penampilan modul penggerak motor ditunjukkan dalam Gambar 4.
2.3 Solusi untuk Akurasi Tutup Saklar Pemutus
Tindakan tutup adalah langkah krusial untuk peralatan pemutus tegangan tinggi. Akurasi tutup yang kurang dapat mempengaruhi operasi stabil seluruh sistem listrik. Untuk lebih meningkatkan akurasi buka dan tutup mekanisme operasional listrik, desain ini menggunakan perangkat penguncian mekanis, bersama dengan saklar bantu Siemens dan kopling gesek, untuk meningkatkan akurasi hingga batas tertentu.
2.3.1 Saklar Bantu Siemens dan Rangkaian Pemadam Busur Thyristor
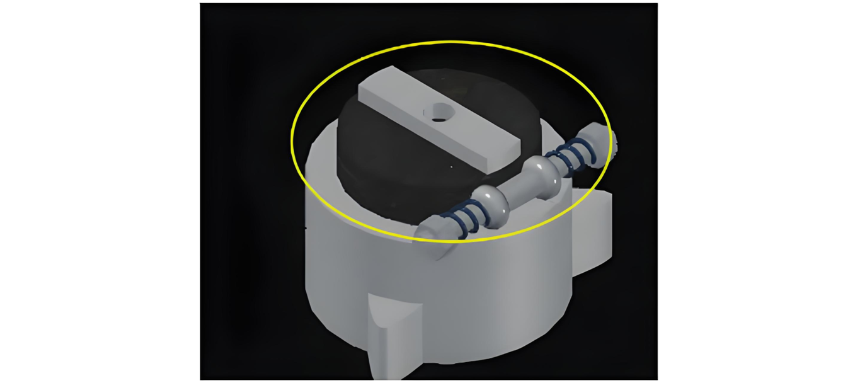
Saklar bantu terhubung ke rangkaian motor utama untuk mengontrol on-off rangkaian motor. Saklar bantu tidak mudah berkarat karena pengaruh lingkungan eksternal, dan mekanisme gesek internalnya mencegah penutupan yang tidak sengaja. Kontak menggunakan pin bertumpu pegas dan selubung keras untuk memastikan sambungan yang stabil dan andal. Struktur spesifik ditunjukkan dalam Gambar 6.

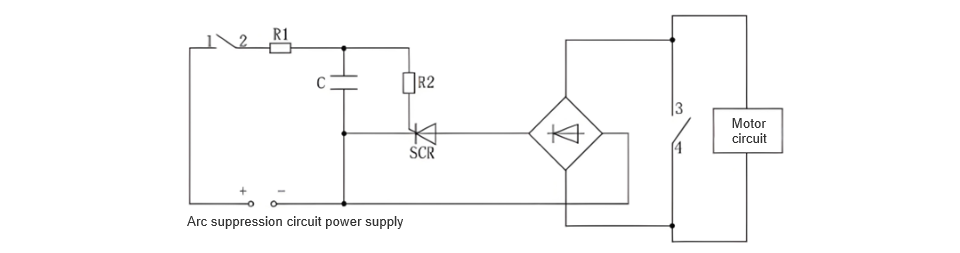
Prinsip Desain Rangkaian Pemadam Busur Thyristor: Selama putusnya saklar bantu, busur listrik terbentuk. Untuk mencegah busur terlalu besar dan merusak saklar, rangkaian pemadam busur thyristor dihubungkan paralel dengan saklar bantu untuk menyerap busur. Desain sirkuit spesifik ditunjukkan dalam Gambar 7, di mana kontak 1, 2, 3, dan 4 semuanya adalah kontak saklar bantu. (Kontak 1 dan 2 digunakan untuk mengontrol on-off rangkaian pemadam busur thyristor, dan kontak 3 dan 4 digunakan untuk mengontrol on-off rangkaian motor utama. Disetel agar kontak 1 dan 2 putus setelah kontak 3 dan 4 untuk mencapai tujuan pemadam busur).
2.3.2 Fungsi Kopling Gesek
Kopling gesek melindungi motor dalam kondisi operasional abnormal apa pun. Setelah saklar pemutus tegangan tinggi berada di tempat setelah tutup, rangkaian motor utama diputus dengan cepat. Namun, karena inersia rotasi mekanis, motor tidak bisa berhenti seketika. Pada saat itu, kopling gesek berfungsi sebagai komponen pelepas beban. Ia memungkinkan roda gesek untuk berputar kosong, menghilangkan inersia mekanis motor dan memastikan penempatan presisi saklar pemutus tegangan tinggi selama operasi buka dan tutup. Selain itu, dengan menyesuaikan ketegangan pegas, torsi gesek dapat dimodifikasi untuk sesuai dengan operasi buka dan tutup berbagai saklar pemutus. Kopling gesek ditunjukkan dalam Gambar 8.
Keunggulan Skema Desain atas Mekanisme Operasional Listrik Tipe CJx
Desain yang diusulkan menghilangkan komponen listrik seperti saklar perjalanan dan saklar batas, mengurangi faktor-faktor instabilitas dan meningkatkan keandalan mekanisme operasional listrik. Desain ini juga menghapus blok terminal dengan banyak kontak, menyederhanakan rangkaian kabel. Dengan desain modular, hanya lima kabel yang menghubungkan dua modul, sangat meningkatkan efisiensi perbaikan kesalahan. Selain itu, dapat membentuk beberapa lapisan perlindungan dengan pemutus sirkuit termomagnetik dan perangkat pelindung motor elektronik yang ada. Bahkan jika rangkaian kontrol listrik mengalami gangguan, perangkat penguncian mekanis dan kopling gesek memastikan keamanan motor. Kopling gesek menetralkan gaya dari inersia mekanis motor, dan perangkat penguncian mekanis mencegah stop batas "membalik", memastikan buka dan tutup presisi saklar pemutus tegangan tinggi dan melindungi integritasnya. Selain itu, start tanpa beban motor meminimalkan arus awal, menghindari goncangan peralatan, dan memperpanjang umur layanan mekanisme operasional.
3 Verifikasi Eksperimental
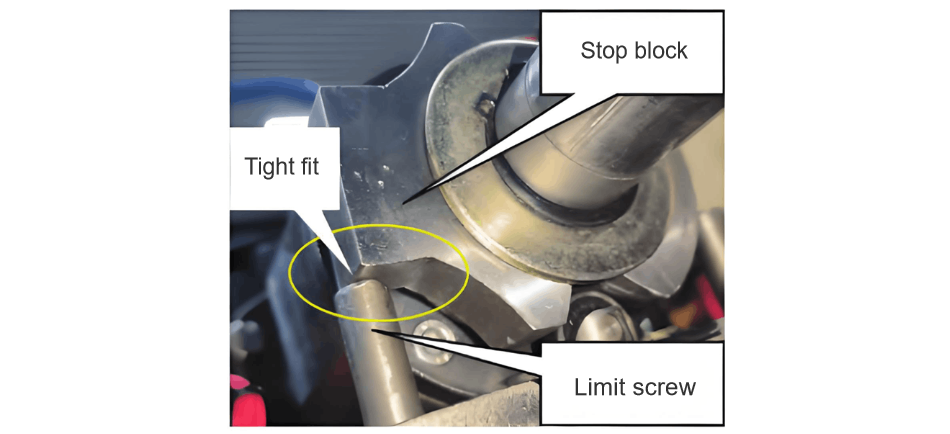
Dengan mematuhi standar relevan seperti "Saklar Pemutus Tegangan Tinggi AC dan Saklar Penyambung" dan "Persyaratan Teknis Umum untuk Peralatan Pemutus dan Kontrol Tegangan Tinggi AC", kombinasi perangkat penguncian mekanis dan kopling gesek lebih lanjut meningkatkan akurasi buka dan tutup saklar pemutus. Dibandingkan dengan mekanisme operasional listrik seri CJx, desain ini menawarkan keandalan dan keamanan yang lebih tinggi. Deteksi kesalahan, melalui uji buka dan tutup berulang dan pengukuran deviasi sudut antara stop batas dan sekrup batas, menunjukkan bahwa mereka sangat selaras, dengan kesalahan pengerjaan sebenarnya dalam 1°, sepenuhnya memenuhi standar teknologi. Posisi sebenarnya ditunjukkan dalam Gambar 9.

4 Kesimpulan
Sebagai salah satu peralatan kunci dalam jaringan listrik, keandalan dan keamanan mekanisme operasional saklar pemutus tegangan tinggi sangat penting. Makalah ini mengambil mekanisme operasional listrik sebagai objek penelitian, melakukan perancangan dan analisis rinci dari metode kontrol terdistribusinya, dan memverifikasinya melalui eksperimen, mencapai hasil yang diharapkan.Berdasarkan konsep kontrol terdistribusi, motor didorong oleh kontroler utama untuk mengontrol buka dan tutup saklar pemutus tegangan tinggi dengan aman dan akurat.
Dengan pendekatan desain modular, mekanisme operasional listrik terutama dibagi menjadi modul kontrol listrik dan modul penggerak motor, mengurangi kompleksitas kabel dan meningkatkan kecepatan pemeliharaan.Perangkat penguncian mekanis dibuat. Dikombinasikan dengan struktur khusus saklar bantu Siemens dan kopling gesek, akurasi buka dan tutup saklar pemutus telah ditingkatkan.










