
Wysokie-napięciowe przełączniki odłączające (HVD) są kluczowymi urządzeniami przepustowymi w sieciach energetycznych, używanymi głównie do izolacji źródeł energii w połączeniu z wyłącznikami. Z proponowanym "cyfrowym siatkowaniem", ciągłymi postępami w technologii wysokonapięciowych urządzeń rozdzielczych oraz rozszerzaniem chińskiej sieci energetycznej, zastosowania HVD wzrosły zarówno pod względem ilości, jak i różnorodności. Mechanizm elektryczny sterujący, kluczowy komponent kontrolujący ruchy przełącznika odłączającego, wymaga wyjątkowej niezawodności i stabilności.
HVD odpowiada za wysoki wskaźnik awarii wśród urządzeń wysokonapięciowych, a mechanizmy sterujące są główną przyczyną usterek. Typowe usterki mechanizmów operacyjnych obejmują odmowę przełączania, awarię operacyjną i niekompletne otwieranie/zamykanie. Ucieczka mechanizmu operacyjnego - gdy silnik kontynuuje pracę - może prowadzić do poważnych przerw w dostawie energii w оборудовании сети. Среди них отказы при открытии/закрытии (включая отказ переключения, неполное действие и низкую точность переключения) значительно влияют на стабильность сети.
Badania wskazują, że awarie HVD spowodowane przez elektryczne mechanizmy sterujące głównie wynikają z problemów w obwodzie wtórnym, takich jak awarie sterowania spowodowane niskiej jakości elementami elektrycznymi lub luźnymi połączeniami w obwodzie wtórnym. Dla szeroko stosowanych mechanizmów sterujących typu CJx, wewnętrzne silniki są chronione przez termomagnetyczne wyłączniki obwodów i elektroniczne urządzenia ochrony silników. Narażone na długotrwałe działanie na zewnątrz, te mechanizmy utrzymują pozycję operacyjną przez 3-6 lat po wprowadzeniu do eksploatacji, ale ich elektryczne komponenty sterujące są kruche i bardzo podatne na czynniki środowiskowe.
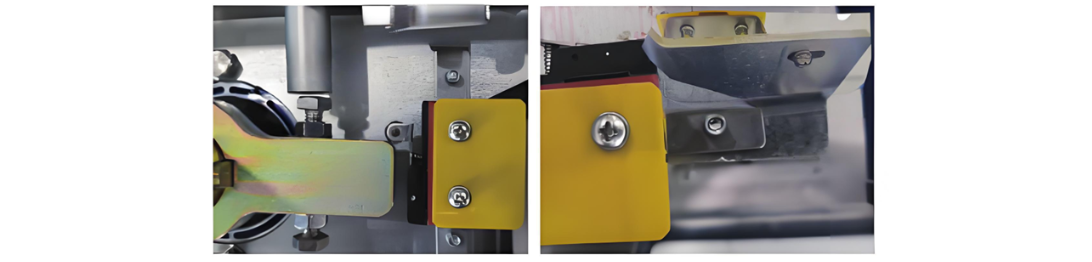
Długotrwała eksploatacja może spowodować luzowanie przełączników granicznych i śrub, co prowadzi do niekompletnego przełączania, jeśli nie zostanie wykryte (na przykład odchylenie pozycyjne 5° w Rysunku 1 stanowi ryzyko dla sieci). Przełączniki podróży, kluczowe dla przejść procesu przełączania, cierpią na zwapnione kontakty i skrócony czas życia ze względu na wpływ środowiska.
Podsumowując, główne przyczyny awarii otwierania/zamykania wysokonapięciowych przełączników odłączających (HVD) można podzielić na dwie kategorie: usterki obwodów sterujących elektrycznie i usterki systemu mechanicznego. Niniejszy artykuł koncentruje się na obwodzie sterującym elektrycznie, który主要包括高压隔离开关(HVD)的开闭故障的主要原因可以分为两类:电气控制回路故障和机械系统故障。本文主要关注电气控制回路,主要包括电机回路故障、限位开关故障和二次回路问题。分析表明,高切换故障率主要归因于电机和二次回路故障,严重影响HVD的操作。因此,解决HVD操作机构的安全性和可靠性迫在眉睫。 1. 高压隔离开关的研究现状 相关研究人员和工程师对上述问题进行了广泛研究,并提出了建设性的解决方案,总结为两个关键方面: 1.1 二次回路故障的研究现状 许多研究解决了二次回路中的电气元件问题。操作机构箱密封不良导致雨水进入,引起元件腐蚀、辅助开关/继电器故障、按钮接触松动和机械卡滞—导致拒动或不完全操作。提出的解决方案包括定期维护、防潮保护和快速故障排除流程图。 对于由于电机惯性引起的机械磨损,如变形销、松动的限位螺栓或磨损的螺丝,建议采取频繁检查和及时消除缺陷的措施。建议使用抗氧化材料处理腐蚀的接线端子,并通过电压/电阻测试方法诊断二次回路故障—通过缺陷记录来提高故障排除效率。有人提出加热装置来解决湿度引起的辅助开关错位和电动操作机构中接触不良的问题。 然而,现有研究仅列举了故障点并强调维护,而没有根本解决方案,反映出对二次回路重视不足。维修人员往往低估电气元件相对于机械部件的重要性,加上对二次元件结构/原理不熟悉以及忽视定期检查,是间接故障原因。 1.2 切换精度问题的研究现状 为了解决切换精度和机械惯性问题,学者们改进了电机控制,设计了无刷直流电机(BLDC)和永磁同步电机(PMSM)操作机构。基于DSP核心和双闭环控制策略的BLDC型HVD机制显示出有效的切换速度调节。类似的方法用于实时速度监控,确保平稳运行和提高闭合精度,为智能电网的发展奠定了基础。值得注意的是,这些设计仍处于理论研究和实验室模拟阶段,在实际应用中的可靠性尚未得到验证。 2 分布式电动操作机构设计方案 根据以上分析,操作机构故障的主要原因是电气控制回路的可靠性差,极易受到环境因素的影响。延迟维护或其他问题会损坏电气元件,导致切换故障。为此,本文提出了一种分布式电动操作机构的设计方案。 2.1 电动操作机构的分布式控制概念 分布式控制将整个系统划分为独立的段,每个段由主控制器独立控制。该设计将电气控制模块与电机驱动模块分离: - 电气控制模块由电子元件组成,具有众多接线触点,易受环境影响。因此将其置于温度稳定的变电站内。 - 电机驱动模块对环境变化更具抵抗力,放置在靠近高压隔离开关的位置。 考虑到多变的室外环境和电缆的敏感性,基于TRIZ的多功能原则,采用时分共享电缆策略。由于电机控制回路和切换状态指示回路不需要同时激活,这种方法只需5根电缆即可传输电机控制信号和隔离开关位置指示信号。这显著减少了外部环境对电动操作机构的影响。分布式电动操作机构的整体控制概念如图2所示。 2.2 分布式控制模块的设计 广泛应用的CJx系列电动操作机构设计为一体化的电气和机械组件,自投运以来全年在固定配置下户外运行。这种集成是其高故障率的关键因素之一。模块化设计打破了这种一体化的户外设置,将机构分为两个独立模块:电气控制模块和机械驱动模块。 模块化设计提供了明显的优势:它允许将电气控制模块安置在温度稳定的环境中,显著减少环境对HVD切换操作的影响;并且最大限度地减少了模块间的接线,能够快速更换故障模块—优先“先更换后修理”以提高维护效率并减少电网停机时间。 2.2.1 电气控制模块 电气控制模块包括主控制器、开/关转换开关、继电器、位置指示电路和缺相保护器,如图3所示的设计概念。 控制逻辑功能如下:从按钮发出的切换信号(开/关)发送到控制器,控制器根据命令调节电机操作。当HVD处于打开状态时,打开位置电路激活,点亮指示灯。按下关闭按钮触发控制器接通主电机继电器和关闭电路转换继电器,驱动HVD关闭。完成后,电机继电器断电,激活关闭位置电路和指示灯。缺相保护器具有定时功能,能在故障情况下在指定时间内断开主电路,保护电机电路。 2.2.2 电机驱动模块 电机驱动模块主要由交流电机、减速器、摩擦联轴器、西门子辅助开关、晶闸管灭弧电路、限位止挡和机械锁定装置组成。当主控制器发出开/关命令时,电机控制电路被激活,通过电机驱动减速器和主轴进行切换操作。主轴顶部的限位止挡与机械锁定装置配合,控制切换位置的准确性。同时,西门子辅助开关与晶闸管灭弧电路配合,断开电机控制电路,停止电机运行。减速器与主轴连接处的90度旋转裕度使电机能够空载启动。电机驱动模块的外观如图4所示。 2.3 解决隔离开关闭合精度问题 闭合动作是高压开关设备的关键步骤。闭合精度不足会影响整个电力系统的稳定运行。为了进一步提高电动操作机构的开闭精度,本设计采用了机械锁定装置,结合西门子辅助开关和摩擦联轴器,在一定程度上提高了精度。 2.3.1 西门子辅助开关和晶闸管灭弧电路 辅助开关连接到主电机电路,控制电机电路的通断。辅助开关不易因外界环境影响而生锈,内部摩擦机制防止意外闭合。触点使用弹簧加载针和硬护套,确保稳定可靠的连接。具体结构如图6所示。 晶闸管灭弧电路的设计原理:在辅助开关断开时会产生电弧。为了防止电弧过大损坏开关,将晶闸管灭弧电路与辅助开关并联,吸收电弧。具体的电路设计如图7所示,其中触点1、2、3和4都是辅助开关触点。(触点1和2用于控制晶闸管灭弧电路的通断,触点3和4用于控制主电机电路的通断。设定触点1和2在触点3和4之后断开,以实现灭弧目的)。 2.3.2 摩擦联轴器的功能 摩擦联轴器在任何异常操作条件下保护电机。一旦高压隔离开关闭合到位,主电机电路迅速断开。但由于机械转动惯性,电机不能立即停止。此时,摩擦联轴器作为卸力组件发挥作用。它使摩擦齿轮空转,耗散电机的机械惯性,确保高压隔离开关在开闭操作中的精确定位。此外,通过调整弹簧的紧度,可以改变摩擦扭矩,以适应各种隔离开关的开闭操作。摩擦联轴器如图8所示。 所设计的方案相比CJx型电动操作机构的优势 所提出的设计消除了行程开关和限位开关等电气元件,减少了不稳定因素,提高了电动操作机构的可靠性。还去除了带有众多触点的接线端子,简化了接线电路。采用模块化设计,仅需五根电缆连接两个模块,大大提高了故障修复效率。此外,它可以与热磁断路器和现有的电子电机保护装置形成多层保护。即使电气控制电路出现故障,机械锁定装置和摩擦联轴器也能确保电机安全。摩擦联轴器抵消了电机机械惯性的力,机械锁定装置防止限位止挡“反弹”,确保高压隔离开关的准确开闭并保护其完整性。此外,电机的空载启动最小化了启动电流,避免了设备冲击,延长了操作机构的使用寿命。 3 实验验证 遵循《高压交流隔离开关和接地开关》和《高压交流开关设备和控制设备通用技术要求》等相关标准,结合机械锁定装置和摩擦联轴器进一步提高了隔离开关的开闭精度。与CJx系列电动操作机构相比,它具有更高的可靠性和安全性。通过多次开闭测试和限位止挡与限位螺钉之间的角度偏差测量,发现它们紧密对齐,实际加工误差在1°以内,完全满足技术标准。实际位置如图9所示。 4 结论 作为电网中的关键设备之一,高压隔离开关操作机构的可靠性和安全性至关重要。本文以电动操作机构为研究对象,对其分布式控制方法进行了详细设计和分析,并通过实验验证,达到了预期效果。基于分布式控制的概念,主控制器驱动电机安全准确地控制高压隔离开关的开闭操作。采用模块化设计方法,电动操作机构主要分为电气控制模块和电机驱动模块,减少了接线复杂性并提高了维护速度。设置了机械锁定装置,结合西门子辅助开关和摩擦联轴器的特殊结构,提高了隔离开关的开闭精度。










