
Visokonaponi prekidači (HVD) su ključni uređaji za prekid struje u električnim mrežama, primarno korišteni za izolaciju izvora struje u kombinaciji s prekidačima. S predloškom o "digitalnim mrežama", stalnim napretkom tehnologije visokonaponskih prekidača i proširenjem električne mreže Kine, primjena HVD-ova je porasla kako u količini tako i u raznolikosti. Električna upravljačka mehanizma, ključni dio koji kontrolira pokrete HVD-a, zahtijeva izvanrednu pouzdanost i stabilnost.
HVD-ovi imaju visoku stopu otkaza među visokonaponskim opremom, a glavni uzrok neispravnosti su upravo upravljačke mehanizme. Uobičajene neispravnosti upravljačkih mehanizama uključuju odricanje prekida, operativne neispravnosti i nepotpuni otvaranje/zatvaranje. Bezbrižno ponašanje upravljačkog mehanizma - gdje se motor nastavlja vrtiti - može dovesti do velikih ispadaka struje u opremi mreže. Međutim, neispravnosti otvaranja/zatvaranja (uključujući odricanje prekida, nepotpune operacije i nisku preciznost prekida) značajno utječu na stabilnost mreže.
Istraživanja pokazuju da neispravnosti HVD-ova uzrokovane električnim upravljačkim mehanizmima uglavnom potječu od problema sekundarnih krugova, poput neispravnosti upravljanja zbog lošeg kvalitetnih električnih komponenti ili slabe veze u sekundarnom krugu. Za široko korištene CJx tipove električnih upravljačkih mehanizama, unutarnji motori su zaštićeni termomagnetskim prekidačima i elektroničkim uređajima za zaštitu motora. Izlagani vanjskim uvjetima dugi niz godina, ti mehanizmi zadržavaju operativnu poziciju 3-6 godina nakon komisioniranja, ali njihove električne komponente upravljanja su osjetljive i lako podložne okruženjskim faktorima.
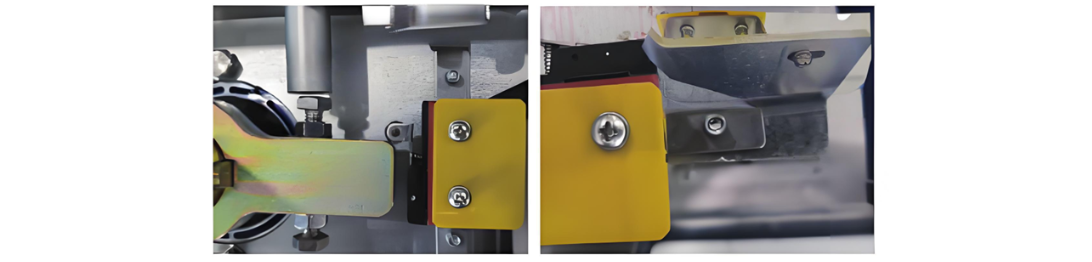
Dugotrajna upotreba može oslabiti granice prekidača i vijake, što može dovesti do nepotpunog prekida ako to nije otkriveno (na primjer, 5° odstupanje položaja prikazano na slici 1 predstavlja rizik za mrežu). Prekidači putovanja, ključni za prelazak tijekom procesa prekida, trpe oksidiranim kontaktima i skraćenim vijekom trajanja zbog utjecaja okruženja.
Ukratko, glavne uzroke neispravnosti otvaranja/zatvaranja visokonaponskih prekidača (HVD) možemo podijeliti u dvije kategorije: neispravnosti električnih upravljačkih krugova i neispravnosti mehaničkog sustava. Ovaj rad fokusira se na električne upravljačke krugove, koji uključuju neispravnosti motora, neispravnosti prekidača granica i probleme sekundarnih krugova. Analiza pokazuje da su visoke stopa neispravnosti prekida uglavnom pripisane neispravnostima motora i sekundarnih krugova, što značajno utječe na rad HVD-a. Stoga je hitno potrebno riješiti sigurnost i pouzdanost upravljačkih mehanizama HVD-ova.
1. Status istraživanja visokonaponskih prekidača
Relevantni istraživači i inženjeri provodili su ekstenzivna istraživanja ovih problema i predlagali konstruktivne rješenja, sažeta u dva ključna aspekta:
1.1 Status istraživanja neispravnosti sekundarnih krugova
Brojna istraživanja obradila su probleme električnih komponenti u sekundarnim krugovima. Loše zapečaćenje kutije upravljačkog mehanizma dopušta ulazak kiše, što dovodi do korozije komponenata, neispravnosti pomoćnih prekidača/releja, slabe veze gumba i mehaničkih zaključavanja - što dovodi do odricanja prekida ili nepotpunog prekida. Predlagana rješenja uključuju redovite održavanje, zaštitu od vlage i dijagram toka grešaka za brzo otklanjanje neispravnosti.
Za mehanični nosnji kao deformirane pinove, slabe granične vijake ili noseve vijake zbog inercije motora, preporučuju se česte inspekcije i pravovremeno uklanjanje defekata. Antioksidacijski materijali predlažu se za korozirane spojeve žica, dok metode testiranja napona/otporu pomažu u dijagnozi neispravnosti sekundarnih krugova - poboljšane su bilješkom o defektima kako bi se povećala učinkovitost otklanjanja neispravnosti. Predlažu se zagrijavajući uređaji za rješavanje problema uzrokovanih vlagočuvanjem, poput neslaganja pomoćnog prekidača i loše veze u električnim upravljačkim mehanizmima.
Međutim, postojeća istraživanja samo nabrajaju točke neispravnosti i naglašavaju održavanje bez temeljnih rješenja, što ukazuje na nisku pažnju posvećenu sekundarnim krugovima. Održavatelji često manje vrednuju električne komponente u usporedbi s mehaničkim dijelovima, a nepoznavanje struktura i principa sekundarnih komponenata, zajedno s zanemarenim redovitim pregledima, su indirektni uzroci neispravnosti.
1.2 Status istraživanja problema s preciznošću prekida
Za rješavanje problema s preciznošću prekida i mehaničkom inercijom, znanstvenici su poboljšali upravljanje motorom dizajnirajući upravljačke mehanizme bazirane na bešćetnjacima DC motora (BLDC) i permanentnim magnetnim sinkronim motorima (PMSM). BLDC-bazirani mehanizam HVD-a s DSP jezgrom i strategijom dvostrukog zatvorenog kruga pokazao je efikasnu regulaciju brzine prekida. Slične metode za stvarno vrijeme praćenja brzine osiguravaju gladak rad i poboljšanu preciznost zatvaranja, stvarajući temelj za razvoj pametnih mreža. Važno je napomenuti da su ovi dizajni još u fazi teorijskog istraživanja i laboratorijske simulacije, s neprokazanom pouzdanosti u praktičnoj primjeni.
2 Dizajn shema distribuiranog električnog upravljačkog mehanizma
Na temelju gore navedene analize, glavni uzrok neispravnosti upravljačkih mehanizama je niska pouzdanost električnog upravljačkog kruga, koji je vrlo osjetljiv na okruženjske faktore. Zakašnjela održavanja ili drugi problemi mogu oštetiti električne komponente, što dovodi do neispravnosti prekida. U odgovoru na to, ovaj rad predlaže distribuirani dizajn električnih upravljačkih mehanizama.
2.1 Koncept distribuiranog upravljanja električnim upravljačkim mehanizmima
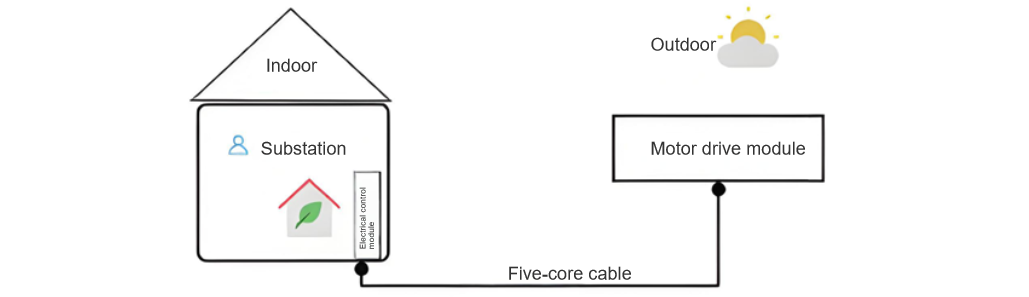
Distribuirano upravljanje dijeli cijeli sustav na odvojene segmente, svaki samostalno upravljan od strane glavnog kontrolera. Taj dizajn odvaja električni upravljački modul od modula pogona motora:
Uzimajući u obzir promjenjivo vanjsko okruženje i osjetljivost kabela, primijenjena je strategija dijeljenja kabelova prema TRIZ-ovom principu višestruke upotrebe. Budući da krugovi upravljanja motorom i indikatora položaja prekidača ne moraju biti aktivirani istovremeno, ovaj pristup omogućuje prijenos signala za upravljanje motorom i indikaciju položaja prekidača koristeći samo 5 kabela. To značajno smanjuje vanjski utjecaj na električni upravljački mehanizam. Ukupni koncept upravljanja distribuiranim električnim upravljačkim mehanizmom prikazan je na slici 2.
2.2 Dizajn distribuiranih kontrolnih modula
Široko korišteni CJx serije električnih upravljačkih mehanizama dizajnirani su s integriranim električnim i mehaničkim dijelovima, koji djeluju vanjski tijekom cijele godine u fiksnoj konfiguraciji od komisioniranja. Ta integracija je ključni faktor koji doprinosi njihovoj visokoj stopi neispravnosti. Modularni dizajn prekidne ta jedinstvenu vanjsku postavku dijeljenjem mehanizma na dva odvojena modula: električni upravljački modul i mehanički pogonski modul.
Modularni dizajn nudi određene prednosti: omogućuje smještanje električnog upravljačkog modula u stabiliziranu temperaturnu okolinu, značajno smanjujući utjecaj okruženja na rad HVD-a; i minimizira vezivanje između modula, omogućujući brzu zamjenu neispravnih modula - prioritizirajući "prije zamjene, kasnije popravak" kako bi se povećala učinkovitost održavanja i smanjio vremenski propust mreže.
2.2.1 Električni upravljački modul
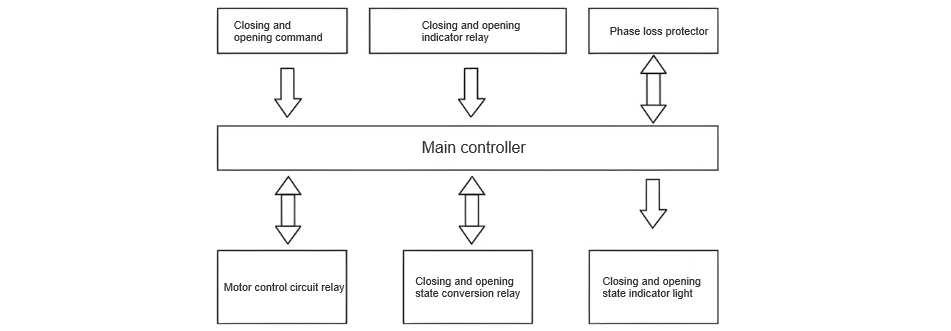
Električni upravljački modul sastoji se od glavnog kontrolera, prekidača otvaranja/zatvaranja, releja, krugova indikacije položaja i zaštitnika od faznog nedostataka, kako je navedeno u konceptu dizajna na slici 3.
Logika upravljanja funkcionira na sljedeći način: signal prekida (otvaranje/zatvaranje) s gumba šalje se kontroleru, koji regulira rad motora prema naredbi. Kada je HVD u stanju otvoren, aktivira se krug otvorenog položaja, paljući indikator. Pritisak na gumb zatvaranja pokreće kontroler da uključi glavni relej motora i relej prebacivanja kruga zatvaranja, pogonjući HVD u zatvoreno stanje. Nakon završetka, relej motora deenergizira, aktivirajući krug zatvorenog položaja i indikator. Zaštitnik od faznog nedostataka štiti krug motora s funkcijom tajmera, odspajajući glavni krug unutar određenog vremenskog okvira u slučaju neispravnosti.
2.2.2 Modul pogona motora
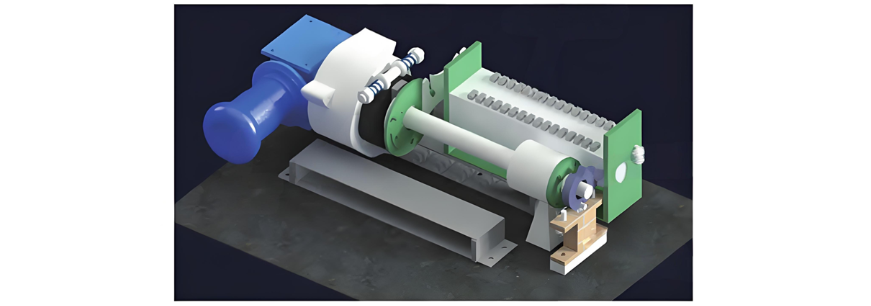
Modul pogona motora sastoji se uglavnom od AC motora, reduktora brzine, trenjevnog spojnog elementa, Siemens pomoćnog prekidača, tiristorne kruga za gasenje lukova, granica prekida i mehaničkog zaključavanja. Kada glavni kontroler šalje naredbu otvaranja/zatvaranja, aktivira se krug upravljanja motorom, pogonjući reduktor brzine i glavnu valjkastu os putem motora za operacije prekida. Granice prekida na vrhu glavne valjkaste ose, zajedno s mehaničkim zaključavanjem, kontroliraju preciznost položaja prekida. Tijekom toga, Siemens pomoćni prekidač radi s tiristornim krugom za gasenje lukova kako bi odspojio krug upravljanja motorom, zaustavljajući rad motora. Rotacijski rezerv od 90 stupnjeva na spajajućem mjestu između reduktora brzine i glavne valjkaste ose omogućuje besopterni pokret motora. Izgled modula pogona motora prikazan je na slici 4.
2.3 Rješenje za preciznost zatvaranja prekidača
Akcija zatvaranja je ključan korak za visokonaponsku opremu. Nedostatak preciznosti zatvaranja može utjecati na stabilan rad cijelog elektroenergetskog sustava. Za daljnje poboljšanje preciznosti otvaranja i zatvaranja električnog upravljačkog mehanizma, ovaj dizajn koristi mehaničko zaključavanje, u kombinaciji s Siemens pomoćnim prekidačem i trenjevnim spojnim elementom, kako bi se preciznost poboljšala do određenog stupnja.
2.3.1 Siemens pomoćni prekidač i tiristorni krug za gasenje lukova
Pomoćni prekidač povezan je s glavnim krugom motora kako bi kontrolirao uključivanje/isključivanje kruga motora. Pomoćni prekidač nije podložan rustiranju zbog vanjskih utjecaja okruženja, a njegov unutarnji trenjevni mehanizam sprečava slučajna zatvaranja. Kontakti koriste opruge i tvrdi omotač kako bi osigurali stabilne i pouzdane veze. Specifična struktura prikazana je na slici 6.

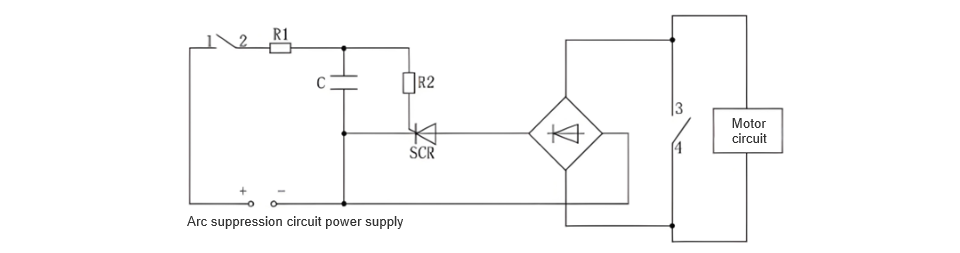
Dizajn principa tiristornog kruga za gasenje lukova: Tijekom isključivanja pomoćnog prekidača, generira se luk. Da bi se sprečilo da luk bude preveliki i oštetio prekidač, tiristorni krug za gasenje lukova povezan je paralelno s pomoćnim prekidačem kako bi apsorbirao luk. Specifični dizajn kruga prikazan je na slici 7, gdje su kontakti 1, 2, 3 i 4 svi kontakti pomoćnog prekidača. (Kontakti 1 i 2 koriste se za upravljanje uključivanjem/isključivanjem tiristornog kruga za gasenje lukova, a kontakti 3 i 4 koriste se za upravljanje uključivanjem/isključivanjem glavnog kruga motora. Postavljeno je da se kontakti 1 i 2 isključe nakon kontakata 3 i 4 kako bi se postigla svrha gasenja lukova).
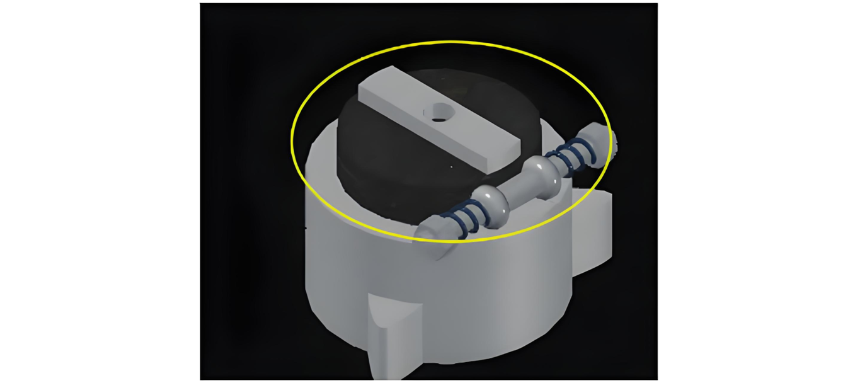
2.3.2 Funkcija trenjevnog spojnog elementa
Trenjevni spojnik štiti motor u svakim neobičnim uvjetima rada. Kada visokonaponski prekidač bude na mjestu nakon zatvaranja, glavni krug motora brzo se isključuje. Međutim, zbog mehaničke rotacijske inercije, motor se ne može odmah zaustaviti. U tom trenutku, trenjevni spojnik djeluje kao sastavni dio koji oslobađa snagu. Omogućuje da se trenjevno zubalo okreće bez opterećenja, disipirajući mehaničku inerciju motora i osiguravajući točnu poziciju visokonaponskog prekidača tijekom operacija otvaranja i zatvaranja. Također, prilagođavanjem čvrstoće opruge, trenjevni moment se može promijeniti kako bi se prilagodio operacijama otvaranja i zatvaranja različitih prekidača. Trenjevni spojnik prikazan je na slici 8.
Prednosti predloženog dizajna u usporedbi s CJx tipom električnih upravljačkih mehanizama
Predloženi dizajn eliminira električne komponente poput prekidača putovanja i granica prekida, smanjujući faktore nestabilnosti i poboljšavajući pouzdanost električnog upravljačkog mehanizma. Također uklanja terminalni blok s brojnim vezama, pojednostavljujući vezni krug. Sa modularnim dizajnom, samo pet kabela povezuje dva modula, značajno poboljšavajući učinkovitost popravka neispravnosti. Također, može formirati više slojeva zaštite s termomagnetskim prekidačima i postojećim elektroničkim uređajima za zaštitu motora. Čak i ako električni upravljački krug ne radi, mehaničko zaključavanje i trenjevni spojnik osiguravaju sigurnost motora. Trenjevni spojnik protupostojava silu iz mehaničke inercije motora, a mehaničko zaključavanje sprečava "odbacivanje" granice prekida, osiguravajući točno otvaranje i zatvaranje visokonaponskog prekidača i zaštitu njegove integriteta. Također, bezopterno pokretanje motora smanjuje početni struja, izbjegavajući udar opreme i produžavajući vijek trajanja upravljačkog mehanizma.
3 Eksperimentalna verifikacija
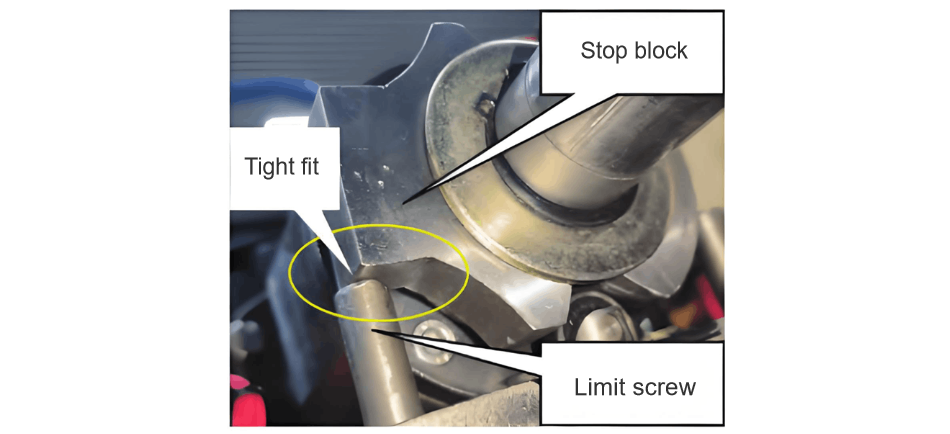
Slijedeći relevantne standardi poput "Visokonaponskih prekidača i zemljajućih prekidača" i "Opće tehničke zahtjeve za visokonaponskim AC opremom za prekid struje i upravljanje", kombinacija mehaničkog zaključavanja i trenjevnog spojnog elementa dodatno poboljšava preciznost otvaranja i zatvaranja prekidača. U usporedbi s CJx serijom električnih upravljačkih mehanizama, nudi veću pouzdanost i sigurnost. Detekcija grešaka, kroz više testova otvaranja i zatvaranja i mjerenja kutnih odstupanja između granice prekida i vijaka granice, pokazuje da su tesno poravnati, s stvarnom greškom obrade unutar 1°, u potpunosti zadovoljavajući tehnološke standarde. Stvarna pozicija prikazana je na slici 9.

4 Zaključak
Kao jedna od ključnih oprema u električnoj mreži, pouzdanost i sigurnost upravljačkog mehanizma visokonaponskih prekidača su izuzetno važne. Ovaj rad uzima električni upravljački mehanizam kao objekt istraživanja, provodi detaljnu analizu i dizajn njegove distribuirane metode upravljanja, te ga eksperimentalno verificira, dostizajući očekivane rezultate.Na temelju koncepta distribuiranog upravljanja, motor je pokrećen glavnim kontrolerom kako bi se sigurno i točno kontrolirale operacije otvaranja i zatvaranja visokonaponskih prekidača.
Modularnim pristupom dizajna, električni upravljački mehanizam je glavno podijeljen na električni upravljački modul i modul pogona motora, smanjujući složenost vezivanja i poboljšavajući brzinu održavanja.Postavljen je mehanički zaključavajući uređaj. U kombinaciji s posebnim strukturama Siemens pomoćnog prekidača i trenjevnog spojnog elementa, preciznost otvaranja i zatvaranja prekidača je poboljšana.










