
Korkean jännitteen katkaisijat (HVD) ovat kriittisiä kytkentälaitteita sähköverkoissa, joita käytetään pääasiassa virtalähteiden eristämiseen yhdessä sulkuilla. "Digitaalisten verkkojen" ehdotuksen, korkean jännitteen kytkentätekniikan jatkuvaa kehitystä ja Kiinan sähköverkon laajentumista myötä HVD-sovellukset ovat kasvaneet sekä määrällisesti että monipuolisesti. Sähköinen toimintomekanismi, joka on avainkomponentti HVD-kytkentien hallinnassa, vaatii poikkeuksellista luotettavuutta ja vakautta.
HVD:t edustavat korkean jännitteen laitteiden suurta epäonnistumisprosenttia, ja toimintomekanismit ovat pääasiallisia virheiden aiheuttajia. Yleisiä toimintomekanismivirheitä ovat kytkentäkielto, toimintovirheet ja puutteellinen avaaminen/sulku. Toimintomekanismin liikakiertominen – jossa moottori jatkaa pyörimistä – voi johtaa merkittäviin sähkökatkoksiin verkkolaitteissa. Näistä avaamisen/sulkemisen virheet (mukaan lukien kytkentäkielto, puutteellinen toiminta ja alhainen kytkentätarkkuus) vaikuttavat merkittävästi verkon vakautukseen.
Tutkimukset osoittavat, että sähköisten toimintomekanismien aiheuttamat HVD-virheet johtuvat pääasiassa toissijaisen piirin ongelmista, kuten huonolaatuisista sähkökomponenteista tai löysistä yhteyksistä toissijaisessa piirissä. Laajalti käytettyjen CJx-tyyppisten sähköisten toimintomekanismien sisäiset moottorit suojaavat lämpö-magneettiset suljet ja sähköiset moottorisuojalaitteet. Pidempään ulkopuolella altistuneet nämä mekanismit säilyttävät toimintakokoonpanonsa 3–6 vuoden ajan komissionoinnista lähtien, mutta niiden sähköiset ohjauskomponentit ovat hauraita ja alttiina ympäristötekijöille.
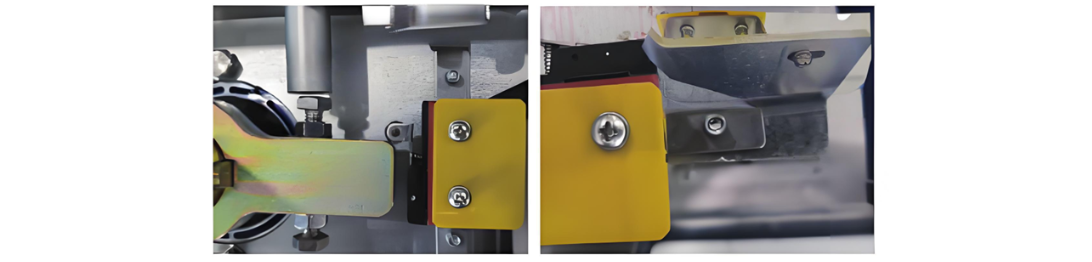
Pitkäaikainen toiminta voi löystää rajoituskytkimiä ja ruuvia, mikä johtaa puutteelliseen kytkentään, jos sitä ei havaita (esimerkiksi 5°-sijaintipoikkeama kuva 1:ssä aiheuttaa verkonriskin). Matkakytkimet, jotka ovat olennaisia kytkentäprosessin siirtymille, kärsivät kontaktien oksidoinnista ja elinkaaren lyhyenemisestä ympäristötekijöiden vaikutuksesta.
Yhteenvetona voidaan todeta, että korkean jännitteen katkaisijoiden (HVD) avaamisen/sulkemisen virheiden pääasialliset syyt voidaan luokitella kahteen ryhmään: sähköisten ohjauspiirien vikoihin ja mekaanisiin järjestelmävikoihin. Tässä artikkelissa keskitytään sähköiseen ohjauspiiriin, joka sisältää pääasiassa moottoripiirien vikat, rajoituskytkimien virheet ja toissijaisen piirin ongelmat. Analyysi osoittaa, että korkeat kytkentävirhetilastot johtuvat pääosin moottorien ja toissijaisen piirin vikoista, mikä vaikuttaa merkittävästi HVD-toimintaan. Siksi on kiireellistä ratkaista HVD-toimintomekanismien turvallisuus ja luotettavuus.
1. Korkean jännitteen katkaisijoiden tutkimustila
Relevanttien tutkijoiden ja insinöörien on tehty laajasti tutkimusta aiempia asioita ja esitetty rakentavia ratkaisuja, jotka voidaan tiivistää kahdeksi keskeiseksi näkökohtaksi:
1.1 Toissijaisen piirin vikoiden tutkimustila
Monet tutkimukset ovat käsitelleet toissijaisen piirin sähkökomponenttien ongelmia. Huonosti suljettu toimintomekanismin laatikko antaa sademäärän tulla sisään, mikä aiheuttaa komponenttien korrooditsemisen, apukytkimien/timanttien epäonnistumisen, löydet nappula-ohjaimet ja mekaaniset estot – mikä johtaa kytkentäkieltoon tai puutteelliseen toimintaan. Ehdotetuiksi ratkaisuiksi on esitetty säännöllistä huoltoa, kosteuspuolustusta ja vika-analyysidiagrammeja nopeaan vianmääritykseen.
Mekaaniselle kulun, kuten muotoonmuuttuneille pinneille, löydet rajoitusruuveille tai kuluneille ruuveille moottorin inertian vuoksi, on suositeltu useita tarkastuksia ja ajoissa puutteiden korjaamista. Antioksidantitekstuileja on ehdotettu korroodeerituille johtokangaskytkimiin, kun taas jännite/vastusmittausmenetelmät auttavat toissijaisen piirin vikoiden diagnosoimisessa – parannettuna vianlokitiedostoilla vianmääritystehtävän tehokkuuden parantamiseksi. Lämpölämmityslaitteita on ehdotettu kosteuden aiheuttamiin ongelmiin, kuten apukytkimen väärälle sijainnille ja huonolle yhteydelle sähköisissä toimintomekanismeissa.
Olemassa olevat tutkimukset kuitenkin vain listaa vikapisteitä ja korostavat huoltoa ilman perusratkaisuja, mikä heijastaa toissijaisen piirin alhaisempaa huomiota. Huoltoyksiköt arvostavat usein sähköisiä komponentteja vähemmän kuin mekaanisia osia, ja epätunnistaminen toissijaisen komponenttirakenteiden/periaatteiden kanssa yhdistettynä säännöllisten tarkastusten laiminlyöntiin ovat epäsuorina vian syinä.
1.2 Kytkentätarkkuuden ongelmien tutkimustila
Kytkentätarkkuuden ja mekaanisen inertian parantamiseksi tutkijat ovat parantaneet moottorin hallintaa suunnittelemalla pensaiden DC-moottoreihin (BLDC) ja pysyvämagneettisiin synkronimoottoreihin (PMSM) perustuvia toimintomekanismeja. BLDC-pohjainen HVD-mekanismi, jolla on DSP-ydin ja kaksinkertainen suljettu säädösstrategia, on osoittanut tehokasta kytkentänopeuden sääntelyä. Samankaltaiset menetelmät reaaliaikaiseen nopeuden valvontaan varmistavat sileän toiminnan ja parantavat sulkemisen tarkkuutta, luo perustan älyverkon kehitykselle. Huomioitavaa on, että nämä suunnitelmat ovat vielä teoreettisessa tutkimuksen ja laboratoriosimulaation vaiheessa, ja niiden luotettavuus käytännön sovelluksissa on vielä todistettavana.
2 Jakautuneen sähköisen toimintomekanismin suunnitteluratkaisu
Edellä mainitun analyysin perusteella toimintomekanismien epäonnistumisten pääasiallinen syy on sähköisen ohjauspiirin heikko luotettavuus, joka on erittäin altis ympäristötekijöille. Viivästyneet huollot tai muut ongelmat voivat vahingoittaa sähkökomponentteja, mikä johtaa kytkentävirheisiin. Vastauksena tähän artikkeli ehdottaa jakautunutta suunnitteluratkaisua sähköisille toimintomekanismeille.
2.1 Jakautunut ohjauskonsepti sähköisille toimintomekanismeille
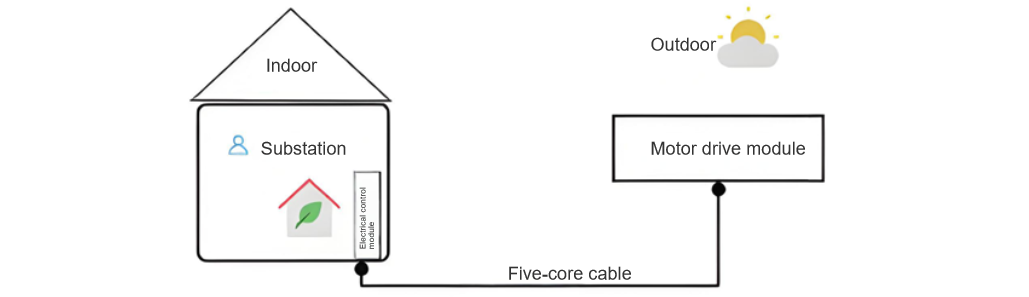
Jakautunut ohjaus jakaa koko järjestelmän erillisiksi segmentteihin, jotka kukin ohjataan pääkontrollerilla. Tämä suunnittelu erottaa sähköisen ohjausmoduulin moottorin ajamismoduulista:
Ottaen huomioon muuttuvan ulkoilmaympäristön ja kaapelien alttiuden, käytetään aikajakoa jaettujen kaapelin strategia TRIZ:n monikäyttöperiaatteen perusteella. Koska moottorin ohjauspiirit ja kytkentätilaindikaattoripiirit eivät tarvitse samanaikaisesti aktivoitua, tämä lähestymistapa mahdollistaa signaalien välittämisen molemmille moottorin ohjaus- ja katkaisijan sijainti-indikaattorin toimintoille vain viiden kaapelin avulla. Tämä vähentää merkittävästi ulkoisten ympäristötekijöiden vaikutusta sähköiseen toimintomekanismiin. Jakautuneen sähköisen toimintomekanismin kokonaisvaltainen ohjauskonsepti on kuvattu kuvassa 2.
2.2 Jakautuneiden ohjausmoduulien suunnittelu
Laajalti käytettyjen CJx-sarjan sähköisten toimintomekanismien suunnittelu on integroitu sähköisillä ja mekaanisilla komponenteilla, jotka toimivat ulkona vuosittain kiinteässä konfiguraatiossa komissionoinnista lähtien. Tämä integraatio on keskeinen tekijä, joka vaikuttaa niiden korkeaan vikaan. Modulaarinen suunnittelu romuttaa tämän yhden paikan ulkoiset asetukset jaottelemalla mekanismin kahdeksi erillisiksi moduuleiksi: sähköiseksi ohjausmoduuliksi ja mekaaniseksi ajamismoduuliksi.
Modulaarinen suunnittelu tarjoaa selkeitä etuja: se mahdollistaa sähköisen ohjausmoduulin sijoittamisen vakioituun lämpöympäristöön, mikä vähentää merkittävästi ympäristötekijöiden vaikutusta HVD-kytkentätoimiin; ja se minimoi moduulien välisen kaapelinnan, mahdollistaen nopean vikakomponenttien korvaamisen – priorisoimalla "ensin korvaa, sitten korjaa" -lähestymistavan huollon tehokkuuden parantamiseksi ja verkon aikakatkosten vähentämiseksi.
2.2.1 Sähköinen ohjausmoduuli
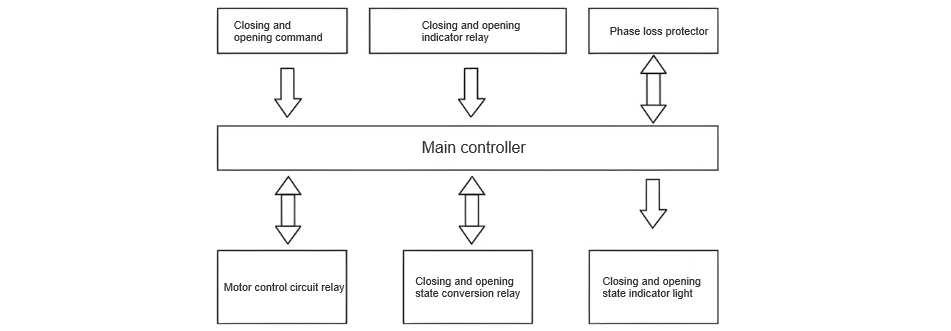
Sähköinen ohjausmoduuli koostuu pääkontrollerista, avaa/sulje-siirtokytkimestä, relaysista, sijainti-indikaattoripiireistä ja vaihepuutussuojalaitteesta, kuten kuvassa 3 oleva suunnittelukonsepti osoittaa.
Ohjauslogiikan toiminta on seuraava: painikkeelta tuleva kytkentäsignaali (avaa/sulje) lähetetään kontrollerille, joka säätelee moottorin toimintaa käskyn mukaan. Kun HVD on avattu, avattu-sijaintipiiri aktivoituu, sytyttäen indikaattorin. Painikkeen painaminen suljetulle tilalle aktivoi kontrollerin, joka ottaa käyttöön päämoottorirelayn ja sulje-siirto-relayn, ajamalla HVD:n sulkemaan. Valmistumisen jälkeen moottorirelay irrotetaan, aktivoiden suljettu-sijaintipiiri ja indikaattori. Vaihepuutussuojalaitteella on ajastinominaisuus, joka irrottaa pääpiirin määrätyssä aikavälissä virheiden tapahtuessa.
2.2.2 Moottorin ajamismoduuli
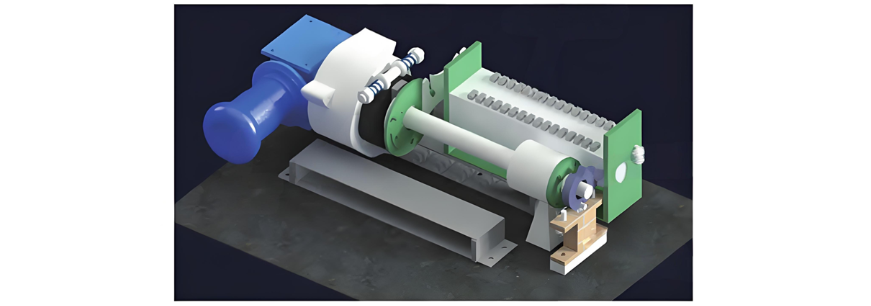
Moottorin ajamismoduuli koostuu pääasiassa vaihtovirtamoottorista, nopeusvähentäjästä, kitkakoplasta, Siemens-apukytkimestä, thyristorin kaarihaarauspisteistä, rajakytkimistä ja mekaanisesta lukituslaitteesta. Kun pääkontrolleri lähettää avaa/sulje-käskyn, moottorin ohjauspiiri aktivoituu, ajamalla nopeusvähentäjää ja pääakselia moottorin kautta kytkentätoimintoja varten. Rajakytkimet pääakselin yläpuolella, yhdessä mekaanisen lukituslaitteen kanssa, hallitsevat kytkentäsijainnin tarkkuutta. Samaan aikaan Siemens-apukytkin työskentelee thyristorin kaarihaarauspisteiden kanssa, irrottaen moottorin ohjauspiirin, pysäyttäen moottorin toiminnan. Nopeusvähentäjän ja pääakselin välillä on 90-asteinen kiertymävaraus, mikä mahdollistaa moottorin tyhjävaraisen käynnistyksen. Moottorin ajamismoduulin ulkonäkö on kuvassa 4.
2.3 Ratkaisu katkaisijan sulkemisen tarkkuuteen
Sulkemistoiminto on avainasento korkean jännitteen kytkentälaite. Riittämätön sulkemisen tarkkuus voi vaikuttaa koko sähköverkon vakautukseen. Edelleen parantaakseen sähköisen toimintomekanismin avaamisen ja sulkemisen tarkkuutta, tämä suunnittelu käyttää mekaanista lukituslaitetta, yhdessä Siemens-apukytkimen ja kitkakopstin kanssa, tarkkuuden parantamiseksi tietylle tasolle.
2.3.1 Siemens-apukytkin ja thyristorin kaarihaarauspiste
Apukytkin on yhdistetty päämoottoripiiriin moottoripiirin päälle/pois-käytön hallitsemiseksi. Apukytkin ei ole altis rostolle ulkoisten ympäristötekijöiden vaikutuksesta, ja sen sisäinen kitkamekanismi estää sattumanvaraisia sulkemisia. Kontaktit käyttävät jousiin perustuvaa pintaa ja kovaan koteloon varmistaakseen vakaita ja luotettavia yhteyksiä. Tarkka rakenne on kuvassa 6.

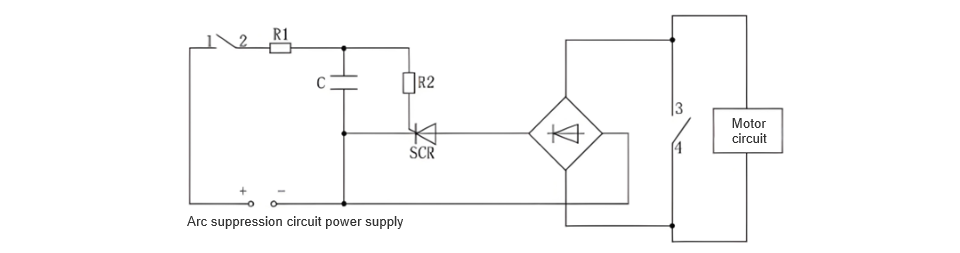
Thyristorin kaarihaarauspisteen suunnitteluperiaate: Apukytkimen irrottamisessa syntyy kaari. Estääkseen kaarin olevan liian suuri ja vahingoittavan kytkimen, thyristorin kaarihaarauspiste on yhdistetty rinnakkain apukytkimen kanssa kaarin absorboimiseksi. Tarkka piirisuunnittelu on kuvassa 7, jossa kontaktit 1, 2, 3 ja 4 ovat kaikki apukytkimen kontakteja. (Kontaktit 1 ja 2 hallitsevat thyristorin kaarihaarauspisteen päälle/pois-käyttöä, ja kontaktit 3 ja 4 hallitsevat päämoottoripiirin päälle/pois-käyttöä. On asetettu, että kontaktit 1 ja 2 irrotetaan kontaktien 3 ja 4 jälkeen kaarihaarauspisteen saavuttamiseksi).
2.3.2 Kitkakopstin tehtävä
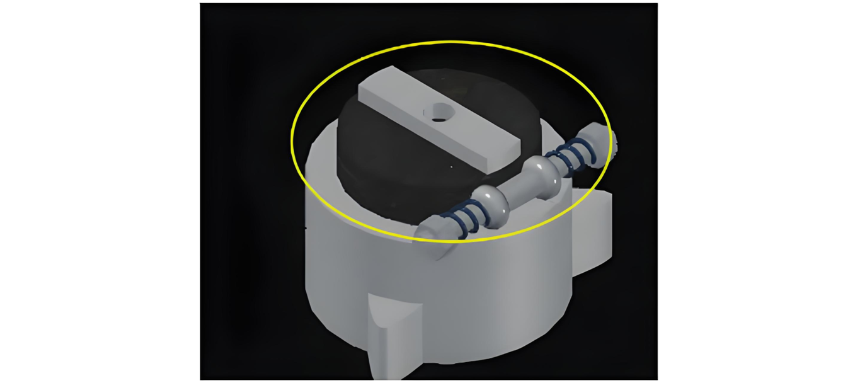
Kitkakopsti suojelee moottoria kaikissa epänormaaleissa toimintatilanteissa. Kun korkean jännitteen katkaisija on sijoitettu sulkemisen jälkeen, päämoottoripiiri katkaistaan nopeasti. Kuitenkin mekaanisen kierron inertian vuoksi moottori ei voi pysähtyä välittömästi. Tällöin kitkakopsti toimii voiman lievittäjänä. Se mahdollistaa kitkavaran idättelyn, levittäen moottorin mekaanisen inertian ja varmistamalla korkean jännitteen katkaisijan tarkan sijainnin avaamisen ja sulkemisen toiminnossa. Lisäksi kitkajännityksen voi muuttaa jousen tiheyden säätämällä sopimaan eri katkaisijoiden avaamisen ja sulkemisen toimintoihin. Kitkakopsti on kuvassa 8.
Suunnitelmien etuja CJx-tyypin sähköisiin toimintomekanismeihin verrattuna
Ehdotettu suunnittelu poistaa sähköiset komponentit, kuten matkakytkimet ja rajoituskytkimet, vähentäen epävakaita tekijöitä ja parantamalla sähköisen toimintomekanismin luotettavuutta. Se myös poistaa pinnakortin monien yhteyksien kanssa, yksinkertaistamalla kaapelipitoa. Modulaarisella suunnittelulla vain viisi kaapelia yhdistää kaksi moduulia, parantamalla huomattavasti vikakorjaustehokkuutta. Lisäksi se voi muodostaa useita suojakerroksia lämpö-magneettisten suljetten ja olemassa olevien sähköisten moottorisuojalaitteiden kanssa. Vaikka sähköinen ohjauspiiri epäonnistuisi, mekaaninen lukituslaitte ja kitkakopsti varmistavat moottorin turvallisuuden. Kitkakopsti vastustaa moottorin mekaanisen inertian vaikutusta, ja mekaaninen lukituslaitte estää rajoituskytkimen "pysähtymisen", varmistamalla korkean jännitteen katkaisijan tarkan avaamisen ja sulkemisen ja suojaten sen kosketuksen. Lisäksi moottorin tyhjävarainen käynnistys vähentää käynnistyksen jännitettä, välttäen laitteen järkytyksen ja pidentäen toimintomekanismin käyttöikää.
3 Kokeellinen vahvistus
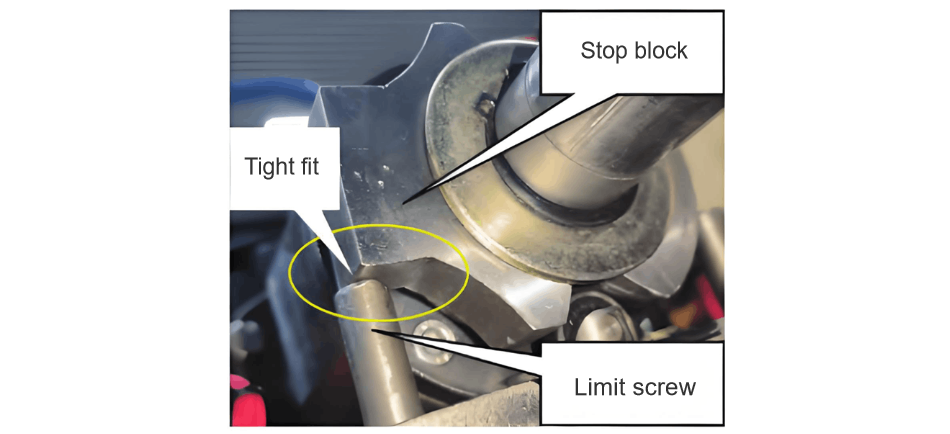
Noudattaen asiaankuuluvia standardeja, kuten "Korkean jännitteen AC-katkaisijat ja maanvyöt" ja "Yleiset tekniset vaatimukset korkean jännitteen AC-kytkentälaite ja ohjauslaite", mekaanisen lukituslaitteen ja kitkakopstin yhdistelmä parantaa lisää katkaisijan avaamisen ja sulkemisen tarkkuutta. CJx-sarjan sähköisiin toimintomekanismeihin verrattuna se tarjoaa korkeamman luotettavuuden ja turvallisuuden. Virheiden tunnistamisessa, useiden avaamisen ja sulkemisen testien ja rajoituskytkimen ja rajoitusruuvun välisen kulman mittaamisen avulla, on havaittu, että ne ovat tiiviisti yhtenevät, todellinen valmistusvirhe on alle 1°, täysin vastaen teknologian standardeja. Todellinen sijainti on kuvassa 9.

4 Johtopäätökset
Korkean jännitteen katkaisijoiden toimintomekanismien luotettavuus ja turvallisuus ovat erittäin tärkeitä sähköverkon keskeisenä laitteena. Tässä artikkelissa sähköinen toimintomekanismi on tutkimuksen kohteena, ja sen jakautunut ohjausmenetelmä on yksityiskohtaisesti suunniteltu ja analysoitu, ja se on vahvistettu kokeellisesti, saavutettu odotetut tulokset.Jakautuneen ohjausmenetelmän periaatteiden mukaan moottori ohjataan pääkontrollerilla, joka varmasti ja tarkasti hallitsee korkean jännitteen katkaisijoiden avaamisen ja sulkemisen toimintoja.
Modulaarisella lähestymistavalla sähköinen toimintomekanismi jaetaan pääasiassa sähköiseksi ohjausmoduuliksi ja moottorin ajamismoduuliksi, vähentäen kaapelipitoa ja parantamalla huollon nopeutta.Mekaaninen lukituslaitte on asetettu. Yhdessä Siemens-apukytkimen ja kitkakopstin erityisrakenteiden kanssa, katkaisijan avaamisen ja sulkemisen tarkkuus on parannettu.










