
Définition et principe du relais d'impédance (relais de distance)
Un relais d'impédance, également connu sous le nom de relais de distance, est un dispositif de protection contrôlé par la tension dont le fonctionnement dépend de la distance électrique (impédance) entre le point de défaut et l'emplacement d'installation du relais. Il fonctionne en mesurant l'impédance de la section défectueuse et en la comparant à un seuil prédéfini.
Fonctionnement
Principe opérationnel
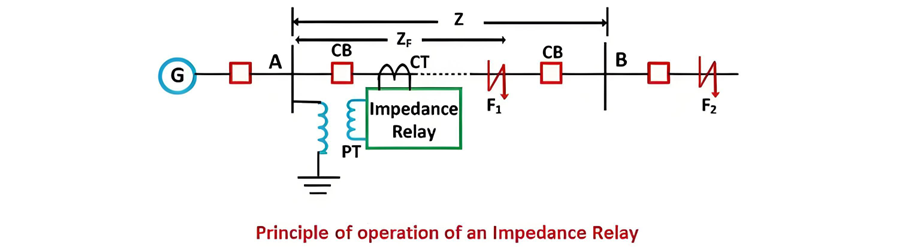
En opération normale, le rapport tension-courant (impédance) reste au-dessus du seuil du relais. Lors d'un défaut (par exemple, F1 sur la ligne AB), l'impédance tombe en dessous du réglage. Par exemple, si le relais est installé pour protéger la ligne AB avec une impédance normale Z, un défaut réduit l'impédance, incitant le relais à déclencher le disjoncteur. Si le défaut se situe en dehors de la zone protégée (par exemple, au-delà de AB), l'impédance reste élevée, et le relais reste inactif.
Caractéristiques opérationnelles
Le relais comprend deux composants clés :

-K3 représente l'effet ressort du relais. En opération normale, le couple net = 0 avec les valeurs de V et I.
Si l'effet de contrôle du ressort est négligé, l'équation devient

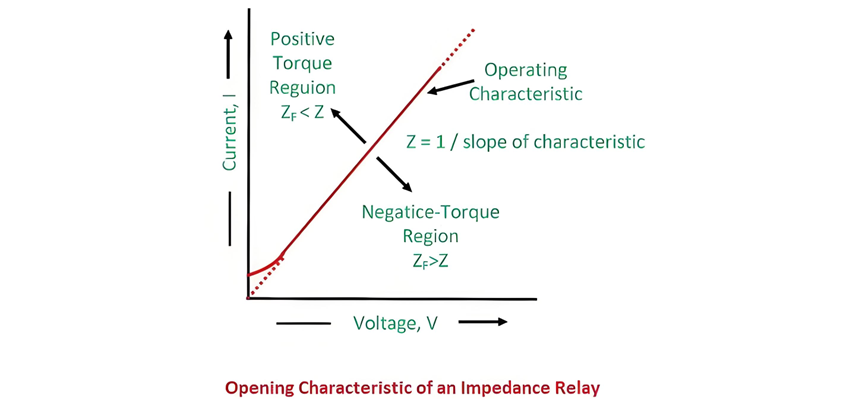
La figure montre les caractéristiques opérationnelles avec la tension et le courant ; la ligne en pointillés indique une impédance de ligne constante.
La figure ci-dessous illustre la caractéristique opérationnelle du relais d'impédance. La région au-dessus de la ligne caractéristique représente un couple positif, où l'impédance de ligne dépasse celle de la section défectueuse, déclenchant l'opération du relais. Inversement, la région de couple négatif (en dessous de la ligne) indique que l'impédance du défaut dépasse l'impédance de ligne, gardant le relais inactif. Cette distinction permet une détection précise des défauts en comparant l'impédance mesurée au seuil prédéfini, assurant une protection fiable dans les systèmes électriques.
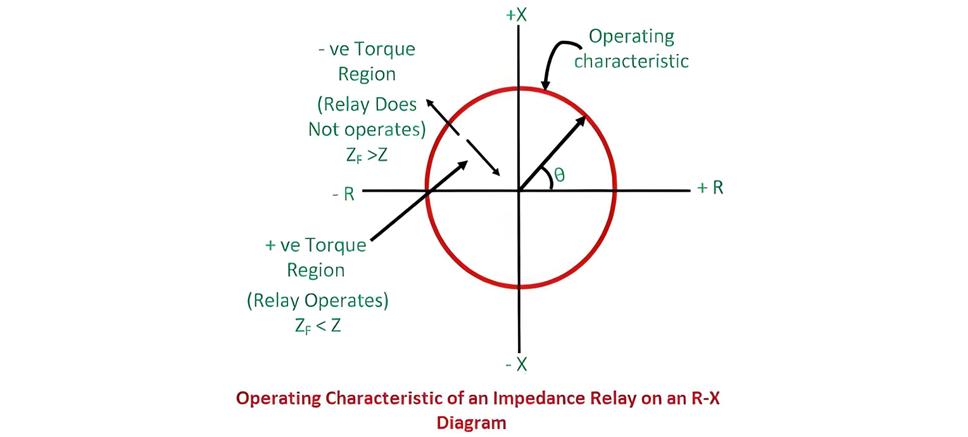
Le rayon du cercle représente l'impédance de ligne ; l'angle de phase X-R indique la position du vecteur. Impédance < rayon = couple positif (le relais s'active) ; impédance > rayon = couple négatif (le relais reste inactif). Cette distinction visuelle assure une détection rapide des défauts dans les systèmes électriques.
Ce relais est classé comme un relais à haute vitesse.
Relais d'induction électromagnétique
Le couple dans ce relais provient des interactions électromagnétiques entre la tension et le courant, qui sont comparées pour l'opération. Dans son circuit, le solénoïde B - alimenté par un transformateur de tension (TT) - génère un couple horaire, tirant le plongeur P2 vers le bas. Un ressort sur P2 applique une force de retenue, créant un couple mécanique horaire.
Le solénoïde A, excité par un transformateur de courant (TC), produit un couple de déviation horaire (pick-up) qui déplace le plongeur P1 vers le bas. Dans des conditions normales, les contacts du relais restent ouverts. Lors d'un défaut dans la zone protégée, le courant du système en augmentation augmente le couple du solénoïde A tout en réduisant le couple de rétablissement du solénoïde B. Cet déséquilibre fait tourner les bras d'équilibre du relais, fermant les contacts pour initier la protection. La conception assure une réponse rapide aux défauts via la comparaison du couple entre les forces électromagnétiques et mécaniques.
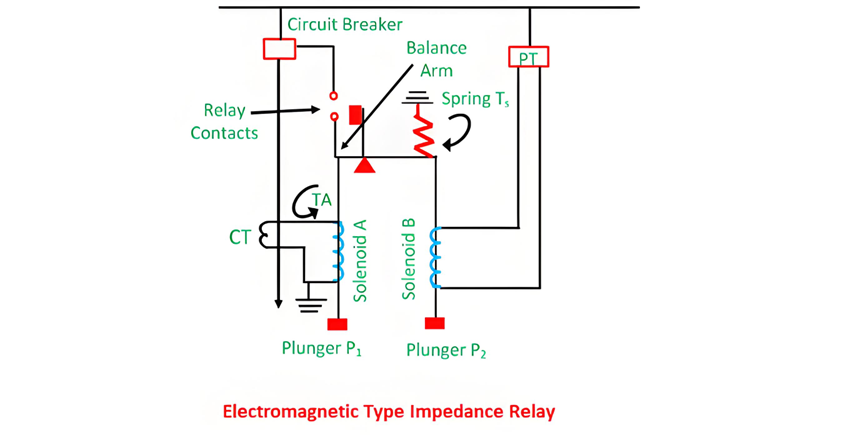
La force exercée par le solénoïde A (l'élément de courant) est proportionnelle à , tandis que celle du solénoïde B (l'élément de tension) est proportionnelle à . En conséquence, le relais s'active lorsque la force dérivée du courant dépasse la force dérivée de la tension.
Les constantes k1 et k2 dépendent des ampères-tours des deux solénoïdes et des rapports des transformateurs de mesure. Les paramètres du relais peuvent être ajustés via des branchements sur les bobines.
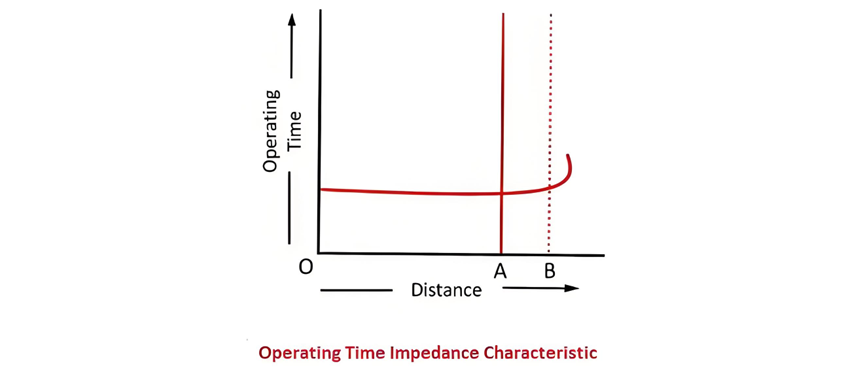
Sur la courbe caractéristique, l'axe y indique le temps d'opération du relais, tandis que l'axe x représente l'impédance. Notamment, le temps d'opération du relais reste constant (indiquant une action instantanée) pour les impédances dans la zone de protection prédéfinie. Au niveau de la distance prédéterminée (correspondant à l'impédance de réglage), les valeurs de tension et de courant se stabilisent ; au-delà de ce point, l'impédance mesurée devient théoriquement infinie, signifiant que le relais reste inactif pour les défauts en dehors de sa portée de protection. Cette relation linéaire entre l'impédance et le temps d'opération assure une détection fiable et rapide des défauts dans la zone définie.
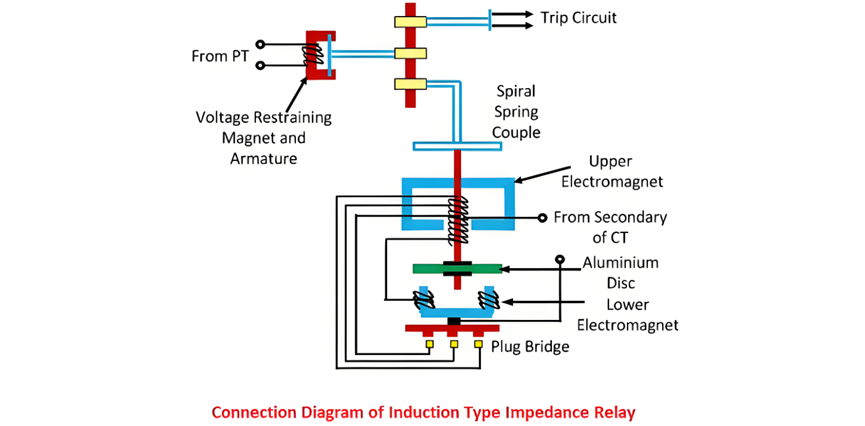
Relais d'impédance à induction
Le schéma de circuit d'un relais d'impédance à induction est illustré ci-dessous. Ce relais intègre à la fois des éléments de courant et de tension, comportant un disque en aluminium qui tourne entre des électroaimants.
L'électroaimant supérieur contient deux enroulements distincts : l'enroulement primaire est connecté à la bobine secondaire d'un transformateur de courant (TC), tandis que l'enroulement secondaire est lié à un transformateur de tension (TT). Le réglage du courant de l'enroulement primaire peut être ajusté via un pont de branchement situé sous le relais, permettant un calibrage précis de la sensibilité du relais. L'élément de tension, alimenté par le TT, génère un champ magnétique qui interagit avec le champ dérivé du courant du TC.
Cette interaction induit des courants de Foucault dans le disque en aluminium, produisant un couple qui entraîne sa rotation. Dans des conditions de fonctionnement normales, le disque reste stationnaire en raison de couples équilibrés ; lors d'un défaut, la surintensité du courant déséquilibre les couples, faisant tourner le disque et déclenchant les contacts du relais. Cette conception assure une détection fiable des défauts basée sur l'impédance dans les systèmes électriques.
Les électroaimants du relais sont connectés en série, avec leurs flux induits générant un couple rotatif qui entraîne le disque en aluminium. Un aimant permanent fournit à la fois un couple de contrôle et un couple de freinage pour stabiliser le mouvement du disque.
En opération normale, la force sur l'armature dépasse le couple de l'élément d'induction, gardant les contacts de coupure ouverts. Lorsqu'un défaut de système se produit, le courant passant par les électroaimants augmente, faisant tourner le disque en aluminium. La vitesse de rotation du disque est directement proportionnelle au courant de défaut, enroulant un ressort au fur et à mesure qu'il tourne. Ce mouvement rotatif surmonte progressivement le couple de retenue de l'aimant permanent.
Une fois que la rotation du disque atteint un seuil critique (correspondant à l'impédance préréglée), les contacts de coupure se ferment, initiant la réponse protectrice. Cette conception assure que le relais réagit rapidement aux défauts tout en maintenant la stabilité en opération normale, l'aimant permanent fournissant un contrôle essentiel sur l'accélération et le freinage du disque pour éviter les faux déclenchements.
L'angle de rotation du disque du relais dépend de la force de l'armature, qui est directement proportionnelle à la tension appliquée. Par conséquent, la tension dicte l'angle de rotation.
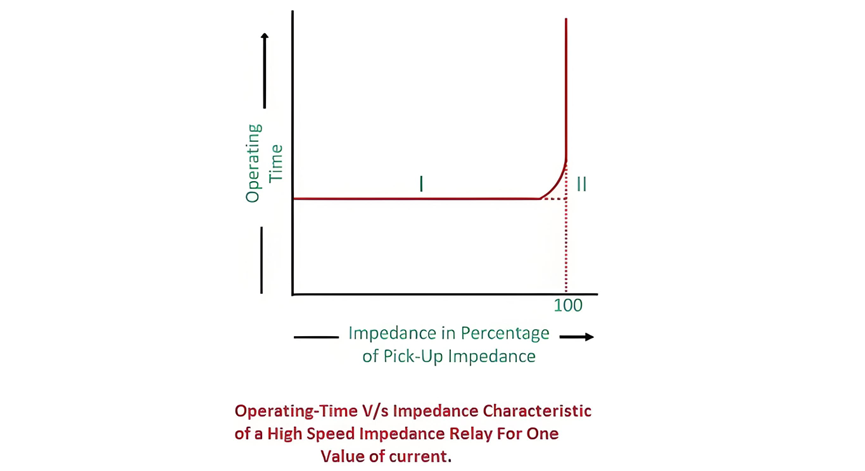
Caractéristique temporelle du relais d'impédance à haute vitesse
La figure montre que le relais reste inactif pour des valeurs supérieures à 100 % du seuil de déclenchement. La courbe 1 représente la caractéristique opérationnelle réelle, tandis que la courbe 2 offre un modèle simplifié de la courbe 1. Cette conception assure une réponse rapide aux défauts dans la plage prédéfinie tout en maintenant la stabilité dans des conditions normales. L'opération à haute vitesse du relais est cruciale pour minimiser les dommages dans les systèmes électriques, la courbe simplifiée facilitant la mise en œuvre et l'analyse dans les paramètres des relais de protection.
Inconvénients du relais d'impédance simple
Voici les principaux inconvénients des relais d'impédance :










