
Definition and Principle of Impedance Relay (Distance Relay)
En impedanserelay, også kendt som afstandsrelay, er en spænding-styret beskyttelsesenhed, hvis funktion afhænger af den elektriske afstand (impedance) mellem fejlstedet og relays installation. Det fungerer ved at måle den defekte sektors impedans og sammenligne det med en forudindstillet tærskel.
Funktionsmekanisme
Driftsprincip
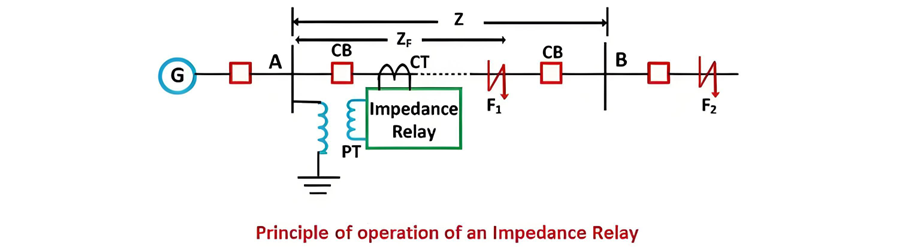
Under normal drift forbliver forholdet mellem spænding og strøm (impedance) over relæets tærskel. Under en fejl (f.eks. F1 på linje AB) falder impedancen under indstillingen. For eksempel, hvis relæet er installeret for at beskytte linje AB med en normal impedance Z, reducerer en fejl impedancen, hvilket får relæet til at udløse bryderen. Hvis fejlen ligger uden for den beskyttede zone (f.eks. udover AB), forbliver impedancen høj, og relæet forbliver inaktiv.
Driftsegenskaber
Relæet består af to vigtige komponenter:

-K3 repræsenterer relæets fjeder effekt. Under normal drift er nettodrejetorque = 0 med V og I værdier.
Hvis fjederkontrol effekten bliver ignoreret, bliver ligningen

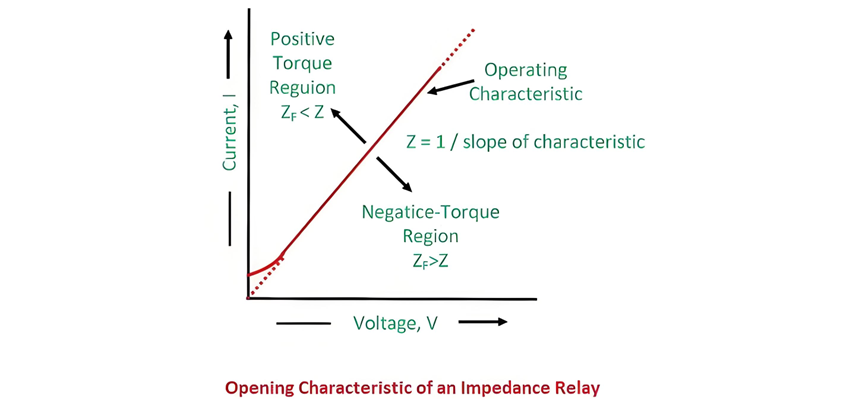
Figuren viser driftsegenskaber med spænding og strøm; stiplet linje angiver konstant linjeimpedance.
Nedenstående figur viser impedanserelayets driftsegenskaber. Området over karakteristiklinjen repræsenterer positiv drejetorque, hvor linjeimpedancen overstiger den defekte sektors, hvilket udløser relæets drift. Omvendt repræsenterer det negative drejetorqueområde (under linjen) at fejlimpedancen overstiger linjeimpedancen, hvilket holder relæet inaktiv. Dette distinktion gør præcis fejldetektion mulig ved at sammenligne den målte impedans med den forudindstillede tærskel, der sikrer pålidelig beskyttelse i kraftsystemer.
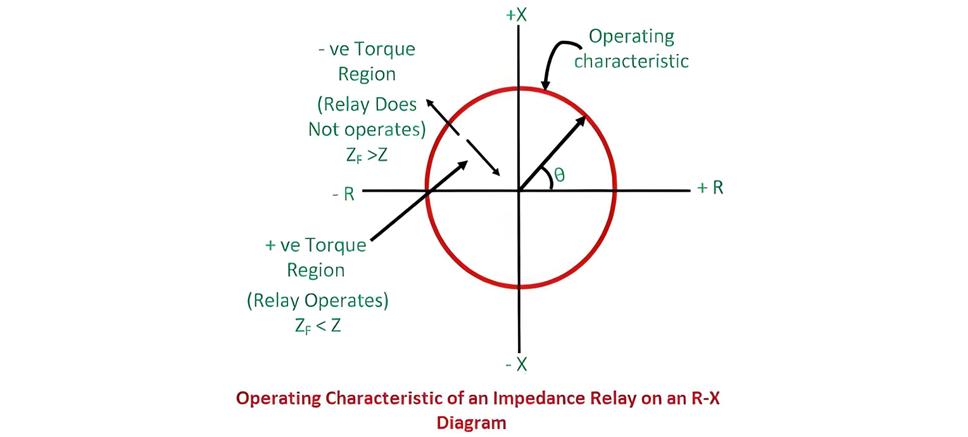
Cirkelradius repræsenterer linjeimpedance; X-R fasevinkel angiver vektorposition. Impedance < radius = positiv drejetorque (relæ drift); impedance > radius = negativ drejetorque (relæ inaktiv). Denne visuelle distinktion sikrer hurtig fejldetektion i kraftsystemer.
Dette relæ er kategoriseret som et højhastighedsrelæ.
Elektromagnetisk induktionsrelæ
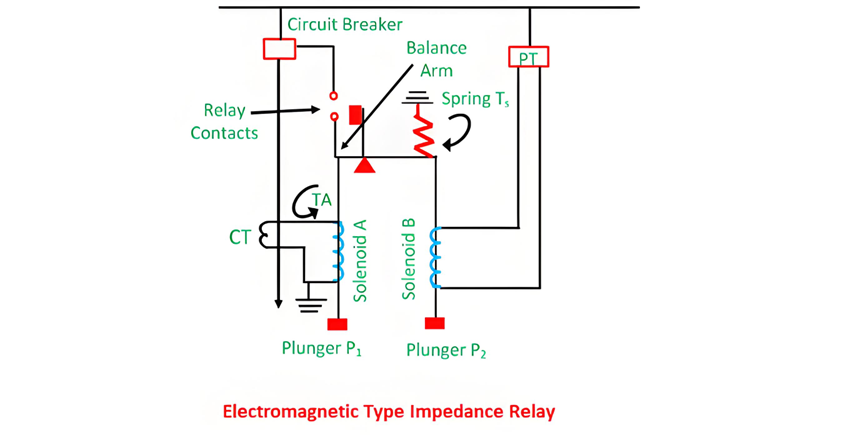
Drejetorque i dette relæ opstår fra elektromagnetiske interaktioner mellem spænding og strøm, der sammenlignes for drift. I dets kredsløb genererer Solenoide B—drives af en potentielt transformator (PT)—klokvis drejetorque, der trækker pind P2 nedad. En fjeder på P2 anvender begrænsende kraft, der skaber klokvis mekanisk drejetorque.
Solenoide A, ansporet af en strømtransformator (CT), producerer klokvis afvejende (pick-up) drejetorque, der bevæger pind P1 nedad. Under normale forhold forbliver relækontakter åbne. Under en fejl i den beskyttede zone, øges systemstrømmen, hvilket øger Solenoide A’s drejetorque, mens det reducerer Solenoide B’s gendannelsesdrejetorque. Dette ubalance roterer relæets balancearme, lukker kontakterne for at initiere beskyttelse. Designet sikrer hurtig reaktion på fejl via drejetorque-sammenligning mellem elektromagnetiske og mekaniske kræfter.
Kraften udført af solenoide A (strømelementet) er proportional med , mens den fra solenoide B (spændingselementet) er proportional med . Som resultat vil relæet aktiveres, når kraften fra strømmen overstiger kraften fra spændingen.
Konstanterne k1 og k2 afhænger af ampère-vindingerne af de to solenoider og forholdene mellem instrumenttransformatorerne. Relæindstillinger kan justeres via tapping på spolerne.
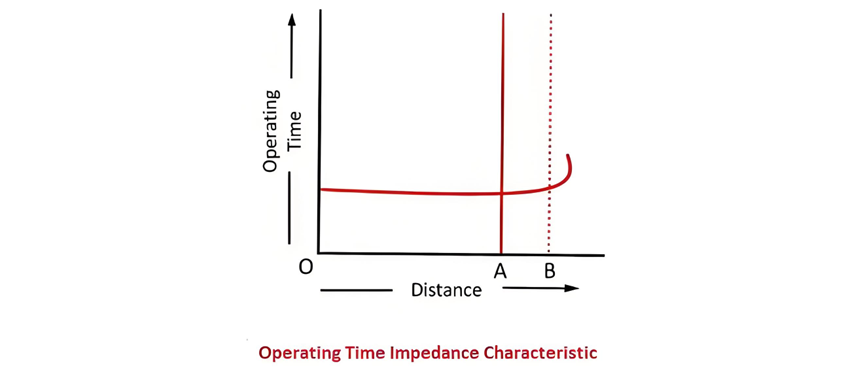
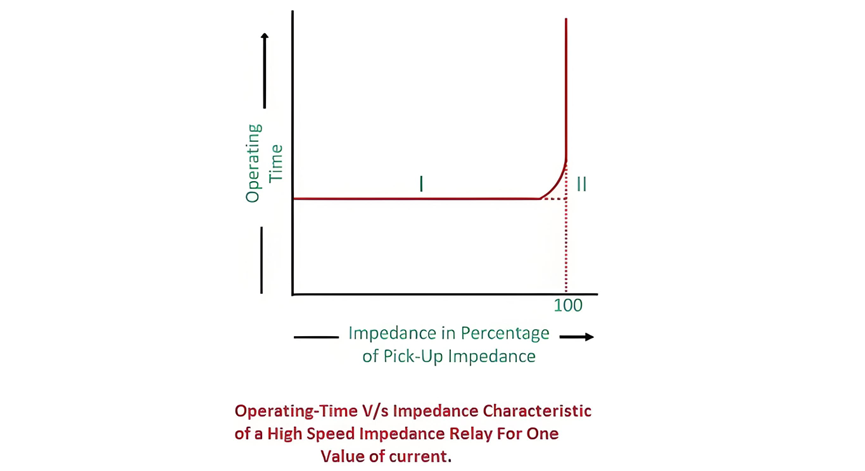
På karakteristikkurven repræsenterer y-aksen relæets drifttid, mens x-aksen repræsenterer impedans. Notabelt er, at relæets drifttid forbliver konstant (indikerer øjeblikkelig handling) for impedanser inden for den forudindstillede beskyttelseszone. Ved den forudbestemte afstand (svarende til den indstillede impedans), stabiliserer spændings- og strømværdier; ud over dette punkt bliver den målte impedans teoretisk uendelig, hvilket betyder, at relæet forbliver inaktiv for fejl uden for sin beskyttelsesområde. Dette lineære forhold mellem impedans og drifttid sikrer pålidelig, hurtig fejldetektion inden for den definerede zone.
Induktions-type impedanserelay
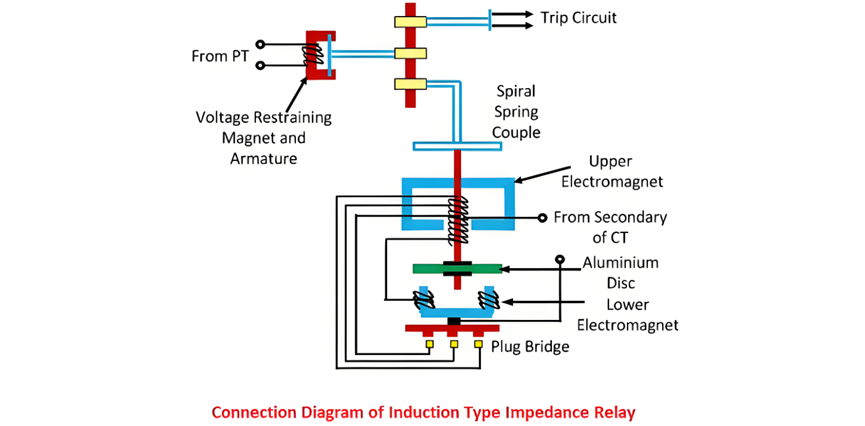
Kredsløbsdiasgrammet for et induktions-baseret impedanserelay er illustreret nedenfor. Dette relæ inkluderer både strøm- og spændingselementer, med en aluminiumsdiske, der roterer mellem elektromagneter.
Den øvre elektromagnet indeholder to forskellige vindinger: primær vindings forbinder til sekundær spole af en strømtransformator (CT), mens sekundær vindings forbinder til en potentielt transformator (PT). Strømindstillingen af primær vindings kan justeres via en plugbro placeret under relæet, hvilket tillader præcis kalibrering af relæets følsomhed. Spændingselementet, drivet af PT, genererer et magnetfelt, der interagerer med strøm-baseret feltet fra CT.
Denne interaktion inducerer eddystrømme i aluminiumsdisken, der producerer en drejetorque, der driver dens rotation. Under normale driftforhold forbliver disken stille på grund af balancerede drejetorquer; under en fejl, udløser strømflodbrydningen ubalancerede drejetorquer, der får disken til at rotere og udløse relækontakterne. Dette design sikrer pålidelig impedans-baseret fejldetektion i kraftsystemer.
Elektromagneterne i relæet er forbundet i serie, med deres inducerede fluxer, der genererer rotationsdrejetorque, der driver aluminiumsdisken. En permanent magnet leverer både kontrol- og bremsestrejt til at stabilisere diskens bevægelse.
Under normal drift overstiger kraften på armaturet drejetorquen fra induktionelementet, hvilket holder udløsningskontakterne åbne. Når et systemfejl opstår, stiger strømmen gennem elektromagneterne, hvilket får aluminiumsdisken til at rotere. Diskens rotationshastighed er direkte proportional med fejlstrømmen, der vindet en fjeder, mens den roterer. Denne rotationsbevægelse overvinder gradvist begrænsende drejetorque fra permanent magneten.
Når diskens rotation når et kritisk terskel (svarende til den indstillede impedans), lukker udløsningskontakterne, hvilket initierer beskyttelsesreaktionen. Dette design sikrer, at relæet reagerer hurtigt på fejl, mens det bibeholder stabilitet under normal drift, med permanent magnet, der leverer essentiel kontrol over diskens acceleration og bremse for at forhindre falsk udløsning.
Rotationsvinklen af relæets diske afhænger af armaturekraften, der er direkte proportional med den anvendte spænding. Derfor dikterer spændingen rotationsvinklen.
Tidskarakteristik for højhastighedsimpedanserelay
Figuren viser, at relæet forbliver inaktivt for værdier, der overstiger 100% af opstartstærsklen. Kurve 1 repræsenterer den faktiske driftsegenskab, mens kurve 2 tilbyder en forenklet model af kurve 1. Dette design sikrer hurtig reaktion på fejl inden for den forudindstillede rækkevidde, samtidig med at det fastholder stabilitet under normale forhold. Relæets højhastighedsdrift er afgørende for at minimere skade i kraftsystemer, med den forenkledte kurve, der faciliterer nemmere implementering og analyse i beskyttelsesrelæindstillinger.
Ned sider af plain impedanserelay
Følgende er de vigtigste ulemper ved impedanserelay:










