
Enkaz Direnci Rölesi (Mesafe Rölesi) Tanımı ve Prensibi
Enkaz direnci rölesi, aynı zamanda mesafe rölesi olarak da bilinir, bir gerilim kontrollü koruma cihazıdır ve işlemi enkaz noktası ile rölenin kurulum konumu arasındaki elektriksel mesafe (direnç)ye bağlıdır. İşlevi, hatalı bölgenin direncini ölçmekte ve bunu önceden belirlenmiş bir eşiğle karşılaştırmaktadır.
Çalışma Mekanizması
İşlem Prensibi
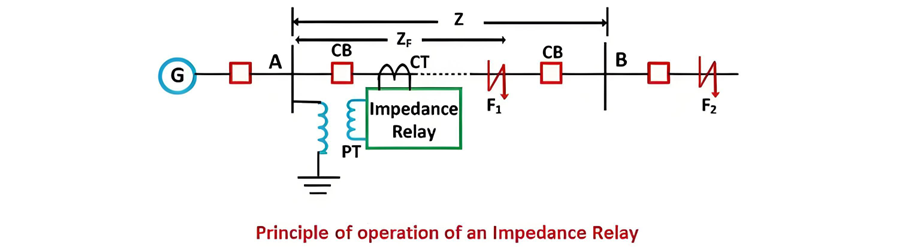
Normal işlemler sırasında, gerilim-akım oranı (direnç) rölün eşiğinin üzerinde kalır. Bir hata sırasında (örneğin, AB çizgisinde F1), direnç ayarın altına düşer. Örneğin, röl AB çizgisini korumak üzere kurulmuşsa ve normal direnç Z, bir hata direnci azaltarak rölün devre kesicisini çalıştırmasına neden olur. Eğer hata korunan alanın dışındaysa (örneğin, AB'nin ötesinde), direnç yüksek kalır ve röl etkinleşmez.
Çalışma Özellikleri
Röl iki ana bileşenden oluşur:

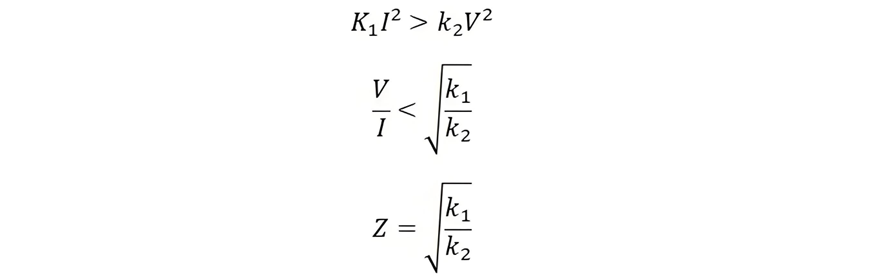
-K3, rölün yay etkisini temsil eder. Normal işlem sırasında, net tork V ve I değerleriyle 0'dır.
Eğer yay kontrol etkisi ihmal edilirse, denklem şu şekli alır

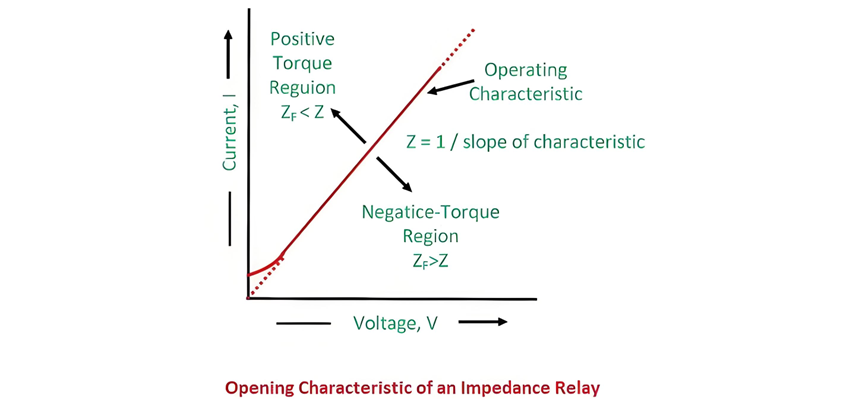
Şekil, gerilim ve akım ile çalışma özellikleri göstermektedir; kesikli çizgi sabit hat direncini gösterir.
Aşağıdaki şekil, enkaz direnci rölünün çalışma özelliğini göstermektedir. Karakteristik çizginin üstündeki bölge pozitif torku temsil eder, burada hat direnci hatalı bölgenin direncinden daha yüksektir ve rölün çalışmasını tetikler. Buna karşılık, negatif tork bölgesi (çizginin altında) hat direncinin hatalı bölgenin direncinden daha düşük olduğunu gösterir, bu da rölün pasif kalmasını sağlar. Bu ayrım, ölçülen dirençle önceden belirlenmiş eşiği karşılaştırarak hassas hata tespiti sağlamasıyla güç sistemlerinde güvenilir koruma sağlar.
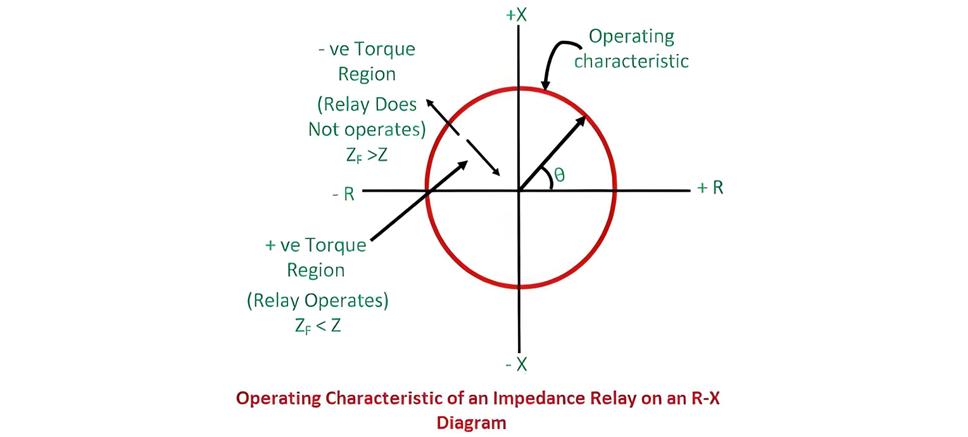
Çemberin yarıçapı hat direncini temsil eder; X-R faz açısı vektör konumunu gösterir. Direnç < yarıçap = pozitif tork (röle çalışır); direnç > yarıçap = negatif tork (röle pasif). Bu görsel ayrım, güç sistemlerinde hızlı hata tespiti sağlar.
Bu röl, yüksek hızlı röl olarak sınıflandırılır.
Elektromanyetik Endüksiyon Rölesi
Bu rölde, tork, gerilim ve akım arasındaki elektromanyetik etkileşimlerden kaynaklanır ve işlem için karşılaştırılır. Devresinde, Solenoid B - potansiyel dönüştürücü (PT) tarafından beslenen - saat yönünde tork oluşturur, plunger P2'yi aşağı doğru çeker. P2 üzerindeki bir yay, saat yönünde mekanik tork yaratmak için kısıtlayıcı kuvvet uygular.
Solenoid A, akım dönüştürücüsü (CT) tarafından uyarılacak şekilde, saat yönünde sapma (pick-up) torku üretir ve plunger P1'i aşağı doğru hareket ettirir. Normal koşullar altında, röl kontakları açık kalır. Korunan bölgede bir hata olduğunda, sistem akımı artarak Solenoid A'nın torkunu artırırken Solenoid B'nin geri dönüş torkunu azaltır. Bu dengesizlik, rölün dengeli kollarını döndürerek kontakları kapatarak korumayı başlatır. Tasarım, elektromanyetik ve mekanik kuvvetler arasındaki tork karşılaştırması yoluyla hatalara hızlı tepki vermesini sağlar.
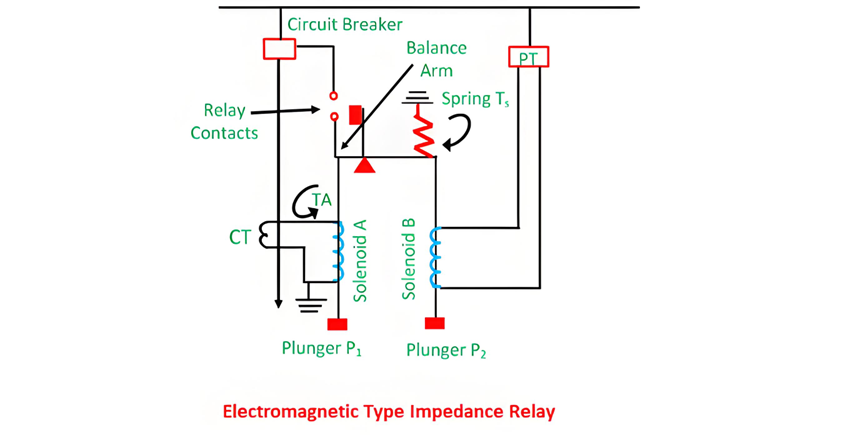
Solenoid A (akım elemanı) tarafından uygulanılan kuvvet, ile orantılıdır, solenoid B (gerilim elemanı) tarafından üretilen kuvvet ise ile orantılıdır. Sonuç olarak, röl, akımdan kaynaklanan kuvvet gerilimden kaynaklanan kuvveti aştiğında aktive olur.
Sabitleme k1 ve k2 iki solenoidin amper tur sayısı ve ölçüm dönüştürücülerinin oranlarına bağlıdır. Röl ayarları, bobinler üzerindeki bağlantı noktalarıyla değiştirilebilir.
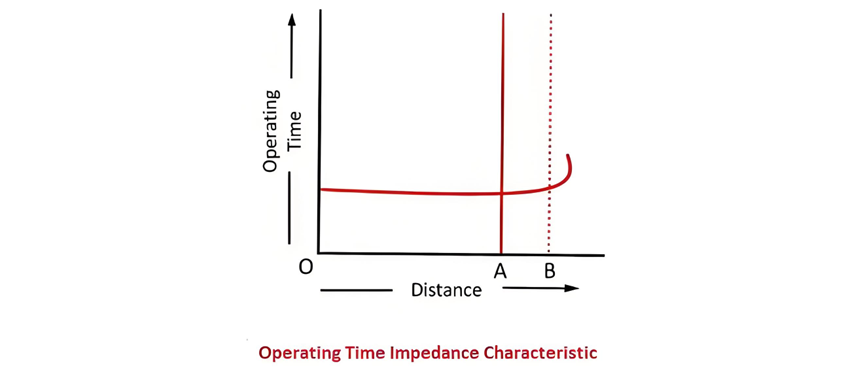
Karakteristik eğride, y-ekseni rölün çalışma süresini, x-ekseni ise direnci gösterir. Notable, rölün çalışma süresi, önceden belirlenmiş koruma bölgesindeki impedanslar için sabit kalır (anlık işlemi gösterir). Belirlenen mesafede (ayarlanan dirençle eşleşen), gerilim ve akım değerleri istikrar eder; bu noktanın ötesinde, ölçülen direnç teorik olarak sonsuz olur, bu da rölün koruma kapsamının dışında olan hatalar için pasif kalacağını gösterir. İmpedans ile çalışma süresi arasındaki bu doğrusal ilişki, tanımlanan bölgedeki hızlı ve güvenilir hata tespiti sağlar.
Endüksiyon Tipi Enkaz Direnci Rölesi
Endüksiyon tipi enkaz direnci rölünün devre diyagramı aşağıdaki gibidir. Bu röl, hem akım hem de gerilim elemanlarını içerir ve iki elektromanyet arasında dönen bir alüminyum disk özelliktedir.
Üst elektromanyet, iki ayrı sarımı içerir: birincil sarım akım dönüştürücüsünün (CT) ikincil bobinine bağlanmıştır, ikincil sarım ise potansiyel dönüştürücü (PT) ile bağlantılıdır. Birincil sarımın akım ayarı, rölün altındaki bir plug bridge ile ayarlanabilir, bu da rölün hassaslığının hassas bir şekilde kalibrasyonunu sağlar. Gerilim elemanı, PT tarafından enerjilenir ve bu, CT'den gelen akım alanıyla etkileşime girer.
Bu etkileşim, alüminyum diske endüksiyon akımları oluşturur ve bu da onun rotasyonunu sağlayan bir tork üretir. Normal işlem sırasında, disk dengeli torklar nedeniyle hareketsiz kalır; bir hata sırasında, akım ani artışı torkları dengesizleştirir, diski döndürerek röl kontaklarını tetikler. Bu tasarım, güç sistemlerinde güvenilir direnç tabanlı hata tespiti sağlar.
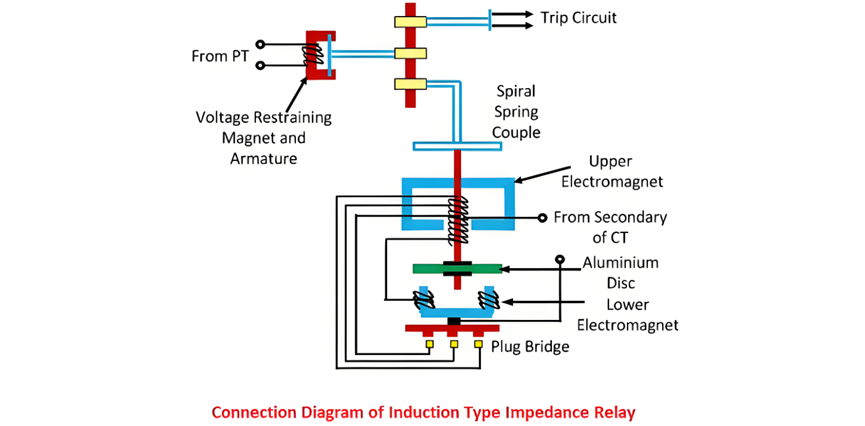
Röldeki elektromanyetler seri olarak bağlanmıştır ve indükledikleri akımlar, alüminyum diski döndüren bir rotasyon torku oluşturur. Kalıcı bir manyet, diskin hareketini istikrarlandırmak için hem kontrol hem de fren torku sağlar.
Normal işlem sırasında, armatür üzerindeki kuvvet endüksiyon elemanın torkundan daha fazladır, bu da trip kontaklarının açık kalmasını sağlar. Sistemde bir hata olduğunda, elektromanyetler aracılığıyla geçen akım artar, bu da alüminyum diskin dönmeye başlamasına neden olur. Diskin rotasyon hızı, hatanın akımına orantılıdır ve dönerken bir yay sarmalıdır. Bu rotasyon hareketi, kalıcı manyetin fren torkunu aşır.
Diskin rotasyonu, önceden belirlenmiş dirençle eşleşen kritik bir eşikte ulaştığında, trip kontakları kapatarak koruma tepkisini başlatır. Bu tasarım, rölün hatalara hızlı tepki vermesini sağlarken, normal işlem sırasında istikrarlı kalmasını sağlar; kalıcı manyet, diskin ivme ve frenini kontrol ederek yanlış tripping'i önler.
Rölün diskinin rotasyon açısı, armatür kuvvetine bağlıdır, bu da uygulanan gerilime orantılıdır. Yani, gerilim rotasyon açısını belirler.
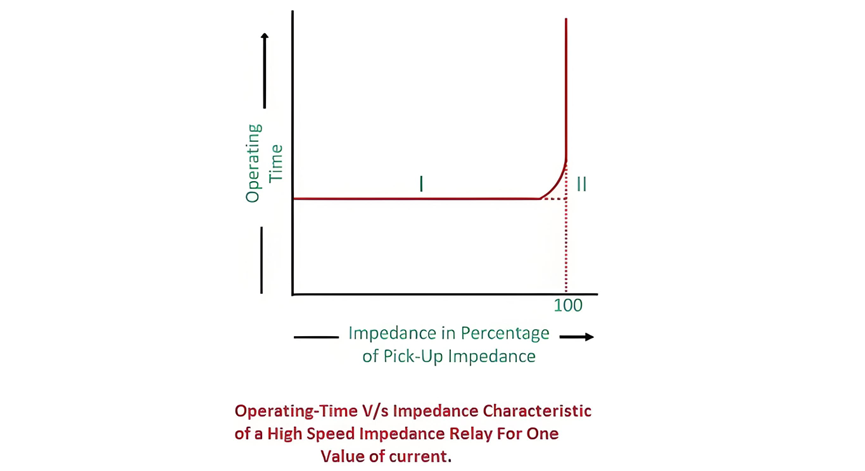
Yüksek Hızlı Enkaz Direnci Rölünün Zaman-Karakteristiği
Şekilde, rölün 100% pick-up eşiğinin üzerindeki değerler için pasif kalması gösterilmektedir. Eğri 1 gerçek operasyonel karakteristiği, Eğri 2 ise Eğri 1'in basitleştirilmiş bir modelini sunmaktadır. Bu tasarım, önceden belirlenmiş aralıkta hatalara hızlı tepki vermesini sağlarken, normal koşullar altında istikrarlı kalmasını sağlar. Rölün yüksek hızlı işlemesi, güç sistemlerinde hasarın minimize edilmesi açısından kritik öneme sahiptir; basitleştirilmiş eğri, koruma röl ayarlarında daha kolay uygulanabilirlik ve analiz sağlar.
Basit Enkaz Direnci Rölünün Dezavantajları
Aşağıda, enkaz direnci röllerinin ana dezavantajları listelenmiştir:










