
تعریف و اصل عملکرد رلهی مانع (رلهی فاصله)
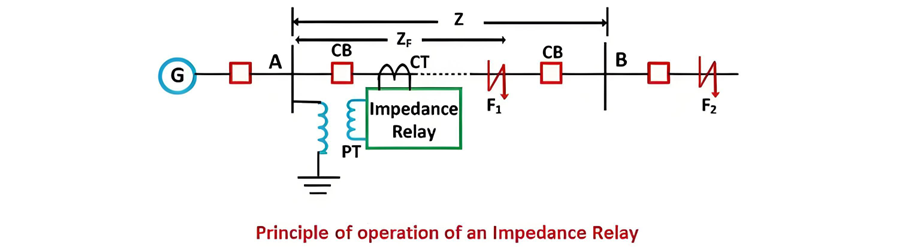
رلهی مانع، که به آن رلهی فاصله نیز گفته میشود، یک دستگاه محافظ ولتاژ-کنترل شده است که عملکرد آن به فاصله الکتریکی (مانع) بین نقطه خرابی و موقعیت نصب رله بستگی دارد. این دستگاه با اندازهگیری مانع بخش خراب شده و مقایسه آن با یک آستانه پیشتعیین شده عمل میکند.
مکانیسم عملکرد
اصل عملکرد
در عملکرد عادی، نسبت ولتاژ به جریان (مانع) بالاتر از آستانه رله است. در زمان خرابی (به عنوان مثال F1 روی خط AB)، مانع کمتر از تنظیم میشود. به عنوان مثال، اگر رله برای محافظت از خط AB با مانع عادی Z نصب شده باشد، خرابی مانع را کاهش میدهد و رله برشکن را قطع میکند. اگر خرابی خارج از منطقه محافظت شده (به عنوان مثال، فراتر از AB) باشد، مانع بالا باقی میماند و رله غیرفعال میماند.
ویژگیهای عملکردی
رله شامل دو مؤلفه کلیدی است:

-K3 نشاندهنده اثر فنر رله است. در عملکرد عادی، گشتاور خالص = 0 با مقادیر V و I.
اگر اثر کنترل فنر نادیده گرفته شود، معادله به صورت زیر میشود

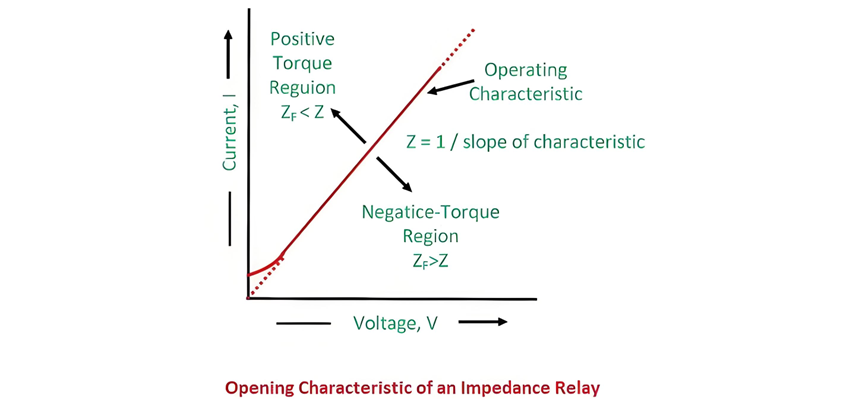
شکل نشاندهنده ویژگیهای عملکردی با ولتاژ و جریان است؛ خط تیره نشاندهنده مانع خط ثابت است.
شکل زیر ویژگی عملکردی رلهی مانع را نشان میدهد. منطقه بالای خط مشخصه نشاندهنده گشتاور مثبت است، جایی که مانع خط بیشتر از مانع بخش خراب شده است، که باعث عملکرد رله میشود. به طور متقابل، منطقه گشتاور منفی (زیر خط) نشاندهنده این است که مانع خرابی بیشتر از مانع خط است، که رله را غیرفعال نگه میدارد. این تمایز با مقایسه مانع اندازهگیری شده با آستانه پیشتعیین شده، تشخیص دقیق خرابی را امکانپذیر میکند و محافظت قابل اعتماد در سیستمهای برق را تضمین میکند.
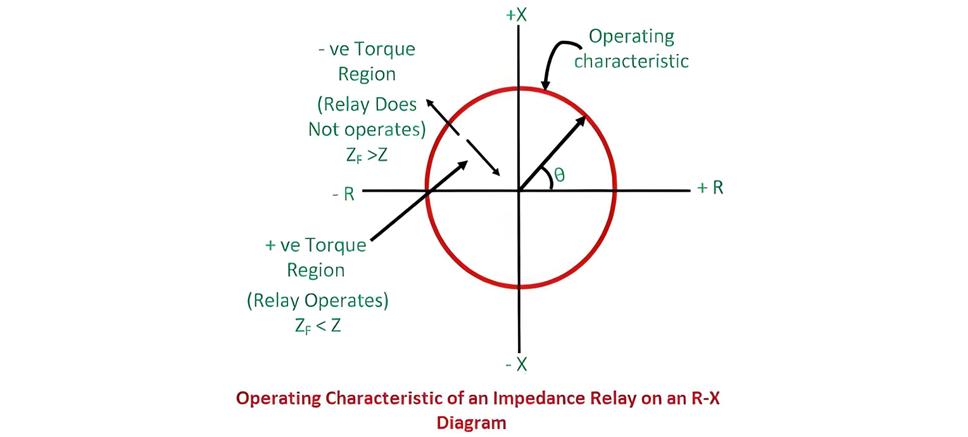
شعاع دایره نشاندهنده مانع خط است؛ زاویه X-R موقعیت بردار را نشان میدهد. مانع < شعاع = گشتاور مثبت (رله عمل میکند)؛ مانع > شعاع = گشتاور منفی (رله غیرفعال است). این تمایز بصری تشخیص سریع خرابی در سیستمهای برق را تضمین میکند.
این رله به عنوان یک رله سرعت بالا طبقهبندی میشود.
رله القایی الکترومغناطیسی
گشتاور در این رله از تعاملات الکترومغناطیسی بین ولتاژ و جریان که برای عملکرد مقایسه میشوند، ناشی میشود. در مدار آن، سولنوئید B—با تغذیه از ترانسفورماتور ولتاژ (PT)—گشتاور ساعتگرد تولید میکند و پلوژر P2 را به سمت پایین میکشاند. فنر روی P2 نیروی محدودکننده اعمال میکند و گشتاور مکانیکی ساعتگرد ایجاد میکند.
سولنوئید A، که توسط ترانسفورماتور جریان (CT) تحریک میشود، گشتاور ساعتگرد واکنشگیر (pick-up) تولید میکند که پلوژر P1 را به سمت پایین حرکت میدهد. در شرایط عادی، تماسهای رله باز میمانند. در زمان خرابی در منطقه محافظت شده، افزایش جریان سیستم گشتاور سولنوئید A را افزایش میدهد و گشتاور بازگردانی سولنوئید B را کاهش میدهد. این عدم تعادل بازوهای تعادل رله را میچرخاند و تماسها را میبندد تا محافظت را شروع کند. طراحی این رله اطمینان میدهد که با مقایسه گشتاور بین نیروهای الکترومغناطیسی و مکانیکی به خرابیها سریعاً پاسخ دهد.
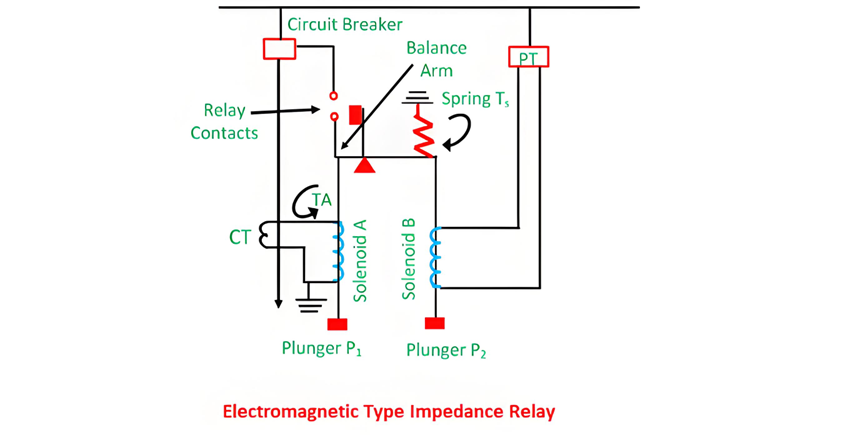
نیروی اعمال شده توسط سولنوئید A (جزء جریان) متناسب با است، در حالی که نیروی از سولنوئید B (جزء ولتاژ) متناسب با است. بنابراین، رله زمانی فعال میشود که نیروی ناشی از جریان بیشتر از نیروی ناشی از ولتاژ باشد.
ثوابت k1 و k2 به دورانآمپرسولنوئیدها و نسبتهای ترانسفورماتورهای ابزار بستگی دارند. تنظیمات رله میتوانند از طریق تپینگها روی سیمپیچها تنظیم شوند.
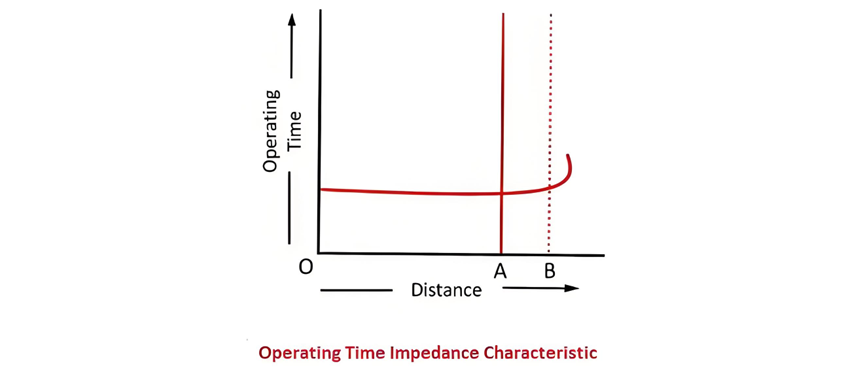
در منحنی ویژگی، محور y نشاندهنده زمان عملکرد رله است، در حالی که محور x مانع را نشان میدهد. قابل توجه است که زمان عملکرد رله برای مقادیر مانع درون منطقه محافظت شده ثابت است (که عملکرد لحظهای را نشان میدهد). در فاصله پیشتعیین شده (که مربوط به مانع تنظیم شده است)، مقادیر ولتاژ و جریان ثابت میشوند؛ فراتر از این نقطه، مانع اندازهگیری شده به طور نظری بینهایت میشود، که به این معنی است که رله برای خرابیهای خارج از محدوده محافظت شده غیرفعال میماند. این رابطه خطی بین مانع و زمان عملکرد اطمینان میدهد که تشخیص سریع و قابل اعتماد خرابیها در منطقه تعریف شده انجام میشود.
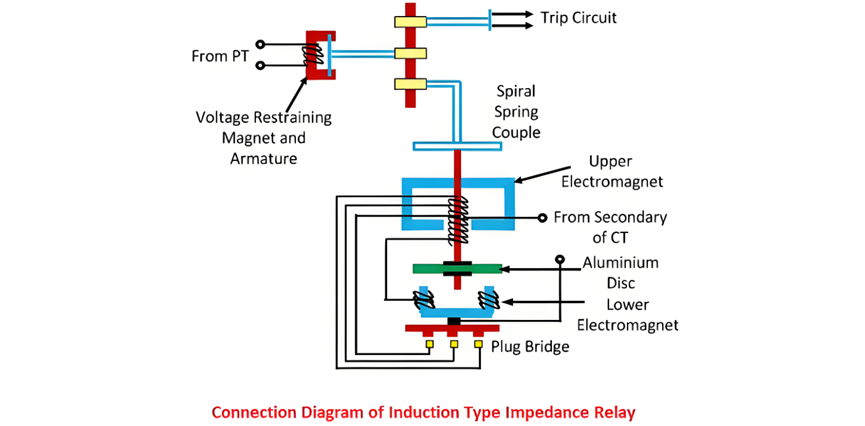
رلهی مانع القایی
نمودار مداری رلهی مانع القایی در زیر نشان داده شده است. این رله هر دو جزء جریان و ولتاژ را شامل میشود و دیسک آلومینیومی دارد که بین الکتروماگنتها میچرخد.
الکتروماگنت بالایی شامل دو پیچش متمایز است: پیچش اصلی به سیمپیچ ثانویه ترانسفورماتور جریان (CT) متصل است، در حالی که پیچش ثانویه به ترانسفورماتور ولتاژ (PT) متصل است. تنظیم جریان پیچش اصلی میتواند از طریق پلگینبریجی که زیر رله قرار دارد، تنظیم شود، که امکان تنظیم دقیق حساسیت رله را فراهم میکند. جزء ولتاژ، که توسط PT تغذیه میشود، میدان مغناطیسی تولید میکند که با میدان مغناطیسی ناشی از CT تعامل میکند.
این تعامل جریانهای گردابی را در دیسک آلومینیومی القاء میکند و گشتاوری تولید میکند که باعث چرخش آن میشود. در شرایط عادی، دیسک به دلیل تعادل گشتاورها ثابت میماند؛ در زمان خرابی، افزایش جریان گشتاورها را نامتوازن میکند و باعث چرخش دیسک و فعال شدن تماسهای رله میشود. این طراحی اطمینان میدهد که تشخیص خرابی بر اساس مانع در سیستمهای برق قابل اعتماد باشد.
الکتروماگنتها در رله به صورت سری متصل شدهاند، و جریانهای القایی آنها گشتاور چرخشی تولید میکنند که دیسک آلومینیومی را میچرخاند. یک مغناطیس دائمی هر دو گشتاور کنترل و محدودکننده را برای پایداری حرکت دیسک فراهم میکند.
در شرایط عادی، نیروی روی آرماتور بیشتر از گشتاور جزء القایی است که تماسهای قطع را باز نگه میدارد. هنگامی که خرابی در سیستم رخ میدهد، جریان از طریق الکتروماگنتها افزایش مییابد و دیسک آلومینیومی میچرخد. سرعت چرخش دیسک مستقیماً متناسب با جریان خرابی است، که با چرخش دیسک فنری را میپیچد. این حرکت چرخشی به تدریج گشتاور محدودکننده از مغناطیس دائمی را غلبه میکند.
هنگامی که چرخش دیسک به آستانه بحرانی (متناظر با مانع تنظیم شده) میرسد، تماسهای قطع بسته میشوند و پاسخ محافظتی آغاز میشود. این طراحی اطمینان میدهد که رله به سرعت به خرابیها پاسخ دهد و در حالت عادی پایداری را حفظ کند، با مغناطیس دائمی که کنترل ضروری بر شتاب و محدودکننده حرکت دیسک را فراهم میکند تا از قطع نادرست جلوگیری کند.
زاویه چرخش دیسک رله به نیروی آرماتور بستگی دارد که مستقیماً متناسب با ولتاژ اعمال شده است. بنابراین، ولتاژ زاویه چرخش را تعیین میکند.
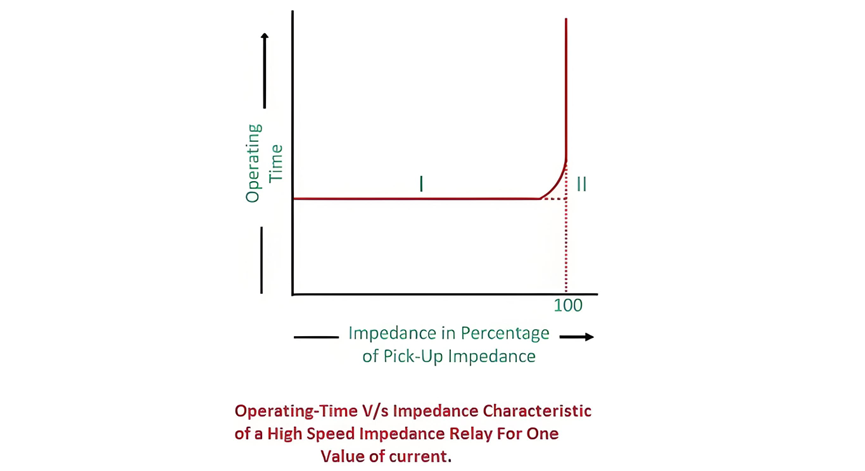
ویژگی زمانی رلهی مانع سرعت بالا
شکل نشان میدهد که رله برای مقادیر بیش از ۱۰۰٪ آستانه قطع غیرفعال میماند. منحنی ۱ نشاندهنده ویژگی عملکردی واقعی است، در حالی که منحنی ۲ مدل سادهشدهای از منحنی ۱ است. این طراحی اطمینان میدهد که به خرابیهای درون محدوده پیشتعیین شده سریعاً پاسخ داده شود و در شرایط عادی پایداری حفظ شود. عملکرد سرعت بالای رله برای کاهش خسارت در سیستمهای برق بسیار مهم است، و منحنی سادهشده تسهیل در پیادهسازی و تحلیل تنظیمات رلههای محافظ را فراهم میکند.
نقایص رلهی مانع ساده
نقاط ضعف کلیدی رلههای مانع عبارتند از:










