
Definition och princip för impedansrelä (distansrelä)
Ett impedansrelä, även kallat distansrelä, är en spänningsstyrd skyddsenhet vars funktion beror på den elektriska avståndet (impedansen) mellan felet och reléns installationsposition. Det fungerar genom att mäta den defekta sektionens impedans och jämföra den med en förinställd tröskel.
Arbetsmekanism
Driftsprincip
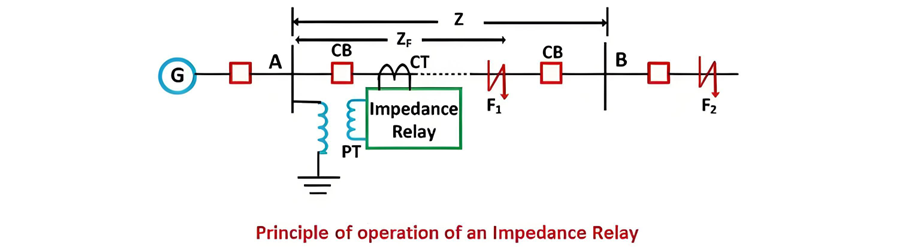
Under normal drift förblir förhållandet mellan spänning och ström (impedans) över reléns tröskel. Vid ett fel (t.ex. F1 på linje AB) sjunker impedansen under inställningen. Till exempel, om relén är installerad för att skydda linje AB med en normal impedans Z, minskar felet impedansen, vilket leder till att relén trippar brytaren. Om felet ligger utanför den skyddade zonen (t.ex. bortom AB), förblir impedansen hög och relén inaktiv.
Driftsegenskaper
Relén består av två viktiga komponenter:

-K3 representerar reléns fjäderverkan. Under normal drift är nettovridmomentet = 0 med V och I-värden.
Om fjäderkontrollverkan ignoreras blir ekvationen

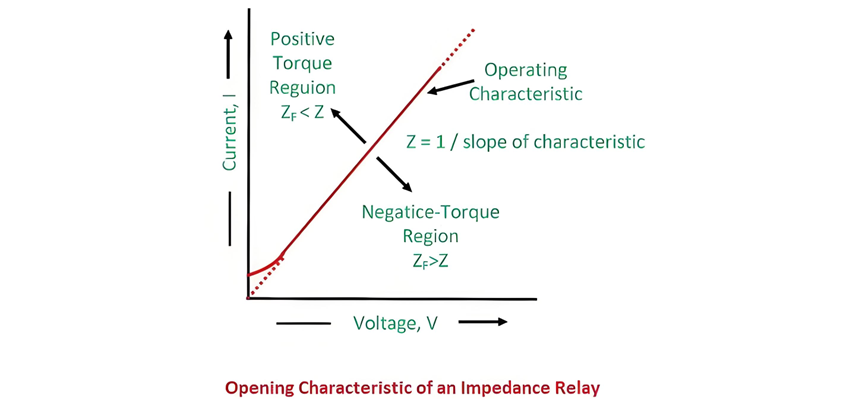
Figurerna visar driftsegenskaper med spänning och ström; streckad linje markerar konstant linjeimpedans.
Följande figur illustrerar impedansreléns driftsegenskap. Regionen ovanför karakteristiklinjen representerar positivt vridmoment, där linjeimpedansen överstiger den defekta sektionens impedans, vilket utlöst reléns drift. Å andra sidan representerar negativt vridmomentregion (under linjen) att felimpedansen överstiger linjeimpedansen, vilket håller relén inaktiv. Denna skillnad möjliggör exakt feldetektion genom att jämföra den mätta impedansen mot den förinställda tröskeln, vilket säkerställer tillförlitlig skydd i elkraftsystem.
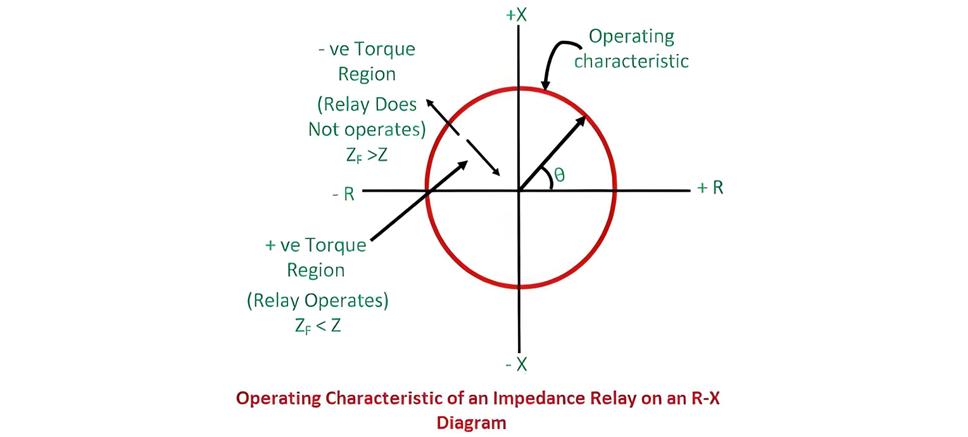
Cirkelns radie representerar linjeimpedansen; X-R fasvinkel anger vektorposition. Impedans < radie = positivt vridmoment (relé drifter); impedans > radie = negativt vridmoment (relén inaktiv). Denna visuella skillnad säkerställer snabb feldetektion i elkraftsystem.
Detta relé klassificeras som ett höghastighetsrelé.
Elektromagnetisk induktionsrelé
Vridmomentet i detta relé uppstår från elektromagnetiska interaktioner mellan spänning och ström, vilka jämförs för drift. I dess krets genererar solenoide B—driven av en potentialtransformator (PT)—medurs vridmoment, dragande plunger P2 nedåt. En fjäder på P2 applicerar bromskraft, skapar medurs mekaniskt vridmoment.
Solenoide A, upprörd av en strömspårtransformator (CT), producerar medurs vridmoment (pick-up) som rör plunger P1 nedåt. Under normala förhållanden stannar relékontakterna öppna. Vid ett fel inom den skyddade zonen ökar systemströmmen Solenoide A’s vridmoment samtidigt som det återställande vridmomentet från Solenoide B minskar. Denna obalans roterar reléns balansarmar, stänger kontakterna för att initiera skydd. Designen säkerställer snabb respons på fel via vridmomentjämförelse mellan elektromagnetiska och mekaniska krafter.
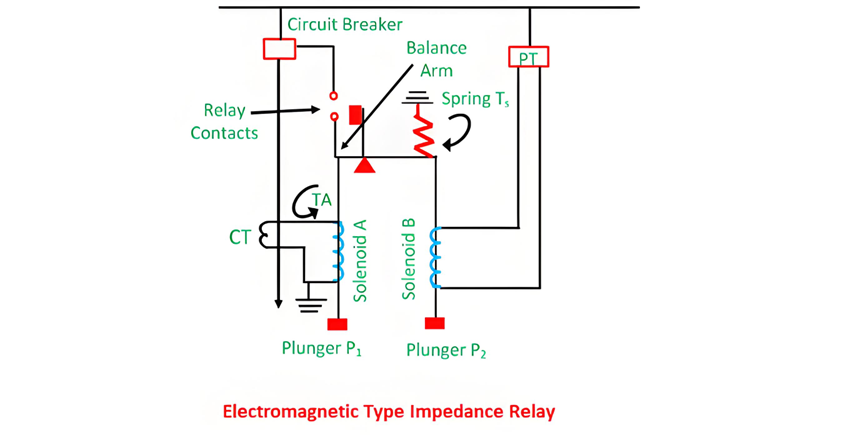
Kraften från solenoide A (strömkomponenten) är proportionell mot , medan den från solenoide B (spänningselementet) är proportionell mot . Som resultat aktiveras relén när strömkraften överstiger spänningskraften.
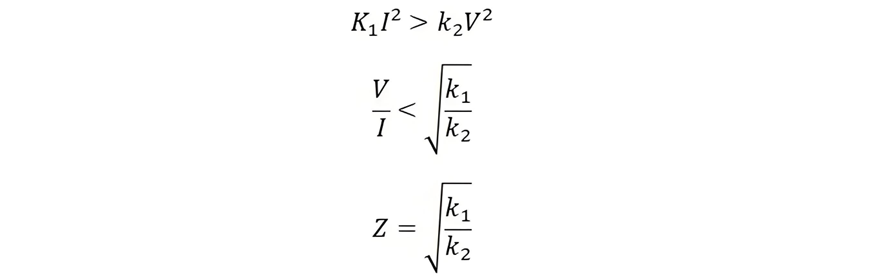
Konstanterna k1 och k2 beror på ampereturner av de två solenoiderna och förhållandet mellan instrumenttransformatorerna. Reléinställningar kan justeras via tappar på spolar.
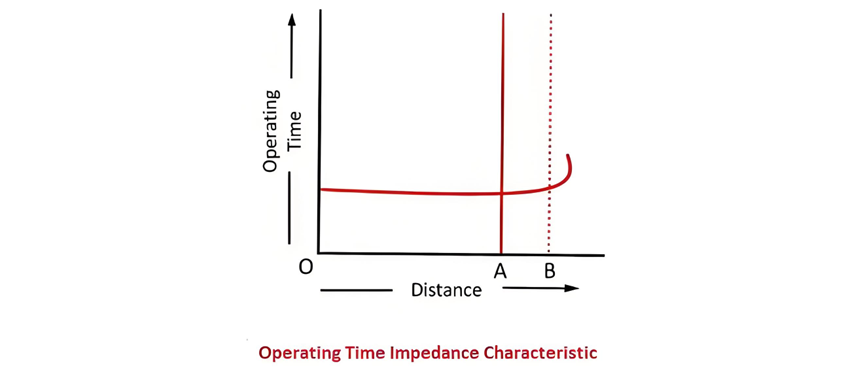
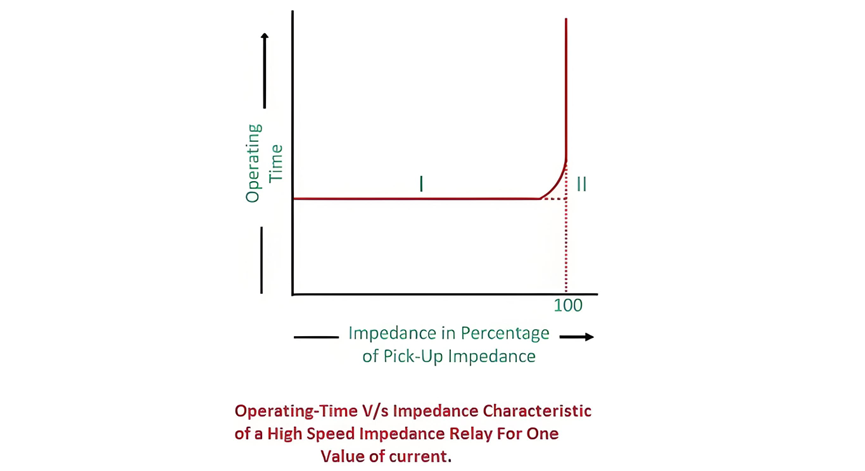
På karaktäristikkurvan betecknar y-axeln reléns drifttid, medan x-axeln representerar impedans. Noterbart är att reléns drifttid förblir konstant (vilket indikerar omedelbar handling) för impedanser inom den förinställda skydds zonen. Vid den förbestämda distansen (som motsvarar den inställda impedansen) stabiliserar sig spänning och ström värden; bortom denna punkt blir den mätta impedansen teoretiskt oändlig, vilket innebär att relén förblir inaktiv för fel utanför dess skyddsområde. Detta linjära förhållande mellan impedans och drifttid säkerställer tillförlitlig, snabb feldetektion inom det definierade området.
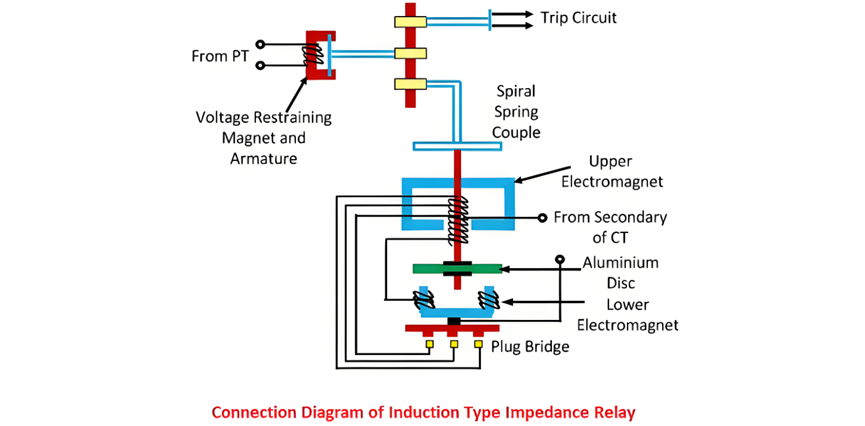
Induktionsbaserat impedansrelé
Kretsschemat för ett induktionsbaserat impedansrelé visas nedan. Detta relé inkluderar både strömand spänningselement, med en aluminiumskiva som roterar mellan elektromagneter.
Den övre elektromagneten innehåller två distinkta vindningar: primär vindning är ansluten till sekundär spol av en strömspårtransformator (CT), medan sekundär vindning är kopplad till en potentialtransformator (PT). Ströminställningen av primär vindning kan justeras via en plugbridge placerad under relén, vilket möjliggör precis kalibrering av reléns känslighet. Spänningselementet, drivet av PT, genererar ett magnetfält som interagerar med strömfältet från CT.
Denna interaktion inducerar virvelströmmar i aluminiumskivan, producera ett vridmoment som driver dess rotation. Under normal drift förblir skivan stillastående på grund av balanserade vridmoment; vid ett fel orsakar strömflödet en obalans i vridmoment, vilket gör att skivan roterar och utlöser relékontakterna. Denna design säkerställer tillförlitlig impedansbaserad feldetektion i elkraftsystem.
Elektromagneter i relén är anslutna i serie, med deras inducerade fluxer som genererar rotationsmoment som driver aluminiumskivan. En permanent magnet ger både kontrollerande och bromsmoment för att stabilisera skivans rörelse.
Under normal drift överstiger kraften på armaturen vridmomentet från induktionskomponenten, vilket håller trippningskontakterna öppna. När ett systemfel inträffar ökar strömmen genom elektromagneter, vilket får aluminiumskivan att rotera. Skivans rotationshastighet är direkt proportionell mot felet ström, vickar en fjäder när den roterar. Denna rotationsrörelse övervinner gradvis bromskraften från den permanenta magneten.
När skivans rotation når ett kritiskt tröskelvärde (som motsvarar den förinställda impedansen), stängs trippningskontakterna, initierar skyddssvaret. Denna design säkerställer att relén reagerar snabbt på fel samtidigt som den bibehåller stabilitet under normal drift, med den permanenta magneten som ger nödvändig kontroll över skivans acceleration och bromsning för att förhindra falska trippningar.
Rotationsvinkeln av reléns skiva beror på armaturenkraft, vilken är direkt proportionell mot den tillämpade spänningen. Således dikterar spänningen rotationsvinkeln.
Tids-karakteristika för höghastighets impedansrelé
Figuren visar att relén förblir inaktiv för värden över 100% av pick-up-tröskeln. Kurva 1 representerar den faktiska driftsegenskapen, medan kurva 2 erbjuder en förenklad modell av kurva 1. Denna design säkerställer snabb respons på fel inom den förinställda zonen samtidigt som den bibehåller stabilitet under normala förhållanden. Reléns höghastighetsdrift är viktig för att minimera skador i elkraftsystem, med den förenklade kurvan som underlättar implementation och analys i skyddssystem.
Nackdelar med vanligt impedansrelé
Följande är de viktigaste nackdelarna med impedansreléer:










