
הגדרה ועקרון של רליאת הומפדן (רליאת מרחק)
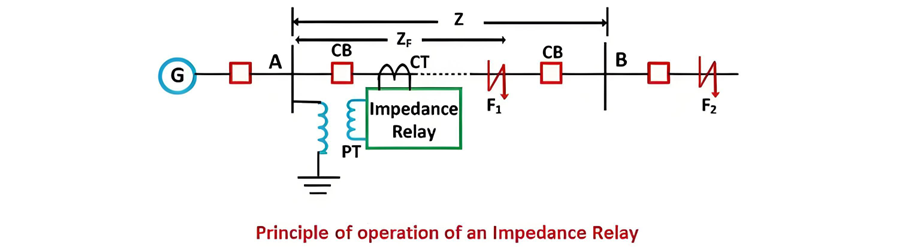
רליאת הומפדן, המכונה גם רליאת מרחק, היא מכשיר הגנה הנשלט על ידי מתח שפעולתו תלויה במרחק החשמלי (הומפדן) בין נקודת התקלה למיקום הרליא. הוא פועל על ידי מדידת ההומפדן של החלק המתקלקל והשוואתו עם סף מקדים.
עקרון פעולה
בהפעלה נורמלית, יחס המתח לזרם (הומפדן) נשאר מעל הסף של הרליא. במהלך תקלה (לדוגמה, F1 על הקו AB), ההומפדן יורד מתחת להגדרה. לדוגמה, אם הרליא מותקן להגן על הקו AB עם הומפדן נורמלי Z, תקלה מפחיתה את ההומפדן, ומרגלת לרליא להפסיק את התא. אם התקלה נמצאת מחוץ לאזור המוגן (לדוגמה, מעבר ל-AB), ההומפדן נשאר גבוה, והרליא נשאר ללא פעולה.
מאפייני פעולה
הרליא כולל שני מרכיבים עיקריים:

-K3 מייצג את השפעת הקפיץ של הרליא. בהפעלה נורמלית, מומנט נטו = 0 עם ערכי V ו-I.
אם השפעת הבקרה של הקפיץ מתעלמת, המשוואה נעשית

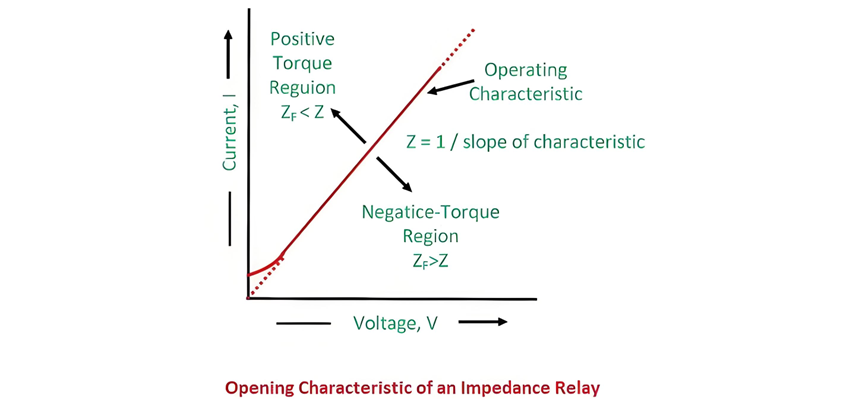
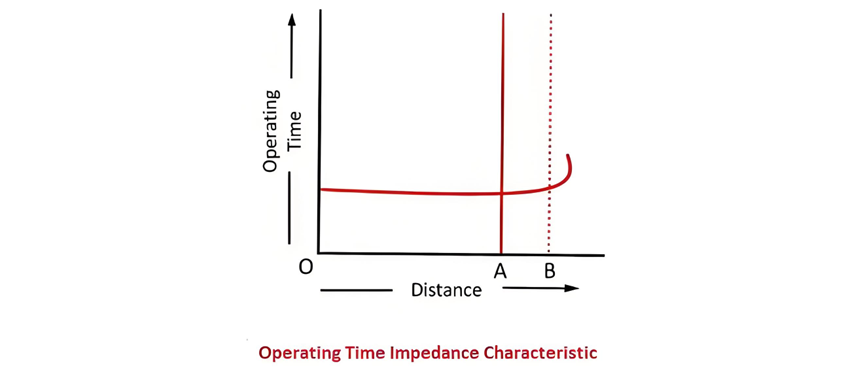
התמונה מציגה מאפיינים של פעולה עם מתח וזרם; קו מקווקו מסמן הומפדן קבוע של הקו.
התמונה שלהלן מתארת מאפיין פעולה של רליאת הומפדן. האזור מעל לקו המאפיין מייצג מומנט חיובי, בו ההומפדן של הקו עולה על ההומפדן של החלק המתקלקל, ומרגלת להפעלת הרליא. לעומת זאת, אזור המומנט השלילי (מתחת לקו) מצביע על כך שההומפדן של התקלה עולה על ההומפדן של הקו, מה שמוריד את הרליא ללא פעולה. ההבחנה הזו מאפשרת הגנה אמינה במערכות חשמל על ידי השוואת ההומפדן שנמדד עם הסף שהוגדר מראש.
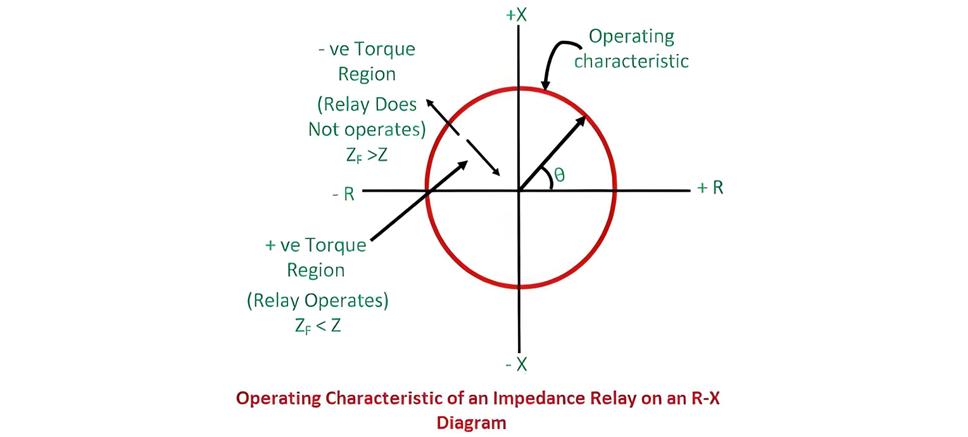
הרדיוס של המעגל מייצג הומפדן של הקו; הזווית X-R מצביעה על מיקום הווקטור. הומפדן < רדיוס = מומנט חיובי (הרליא פועל); הומפדן > רדיוס = מומנט שלילי (הרליא ללא פעולה). ההבחנה הוויזואלית הזו מבטיחה איתור מהיר של תקלות במערכות חשמל.
הרליא מסווג כרליא מהיר.
רליא השראה אלקטרומגנטית
מומנט הרליא מתעורר מהשראות אלקטרומגנטיות בין מתח לזרם, שמשויכים לפעולה. במעגל שלו, סולנואיד B - מופעל על ידי טראנספורמורי פוטנציאל (PT) - מייצר מומנט השראה בכיוון השעון, מושך את המחץ P2 למטה. קפיץ על P2 מפעיל כוח מגביל, ומייצר מומנט מכני בכיוון השעון.
סולנואיד A, מופעל על ידי טראנספורמורי זרם (CT), מייצר מומנט השראה בכיוון השעון (pick-up) שמשלים את המחץ P1 למטה. בתנאים נורמליים, מגעים של הרליא נשארים פתוחים. במהלך תקלה באזור המוגן, זרם מערכת מתגבר מגדיל את מומנט סולנואיד A תוך הפחתת מומנט השחזור של סולנואיד B. אי-איזון זה מסובב את זרועות האיזון של הרליא, סוגר מגעים כדי להתחיל הגנה. העיצוב מבטיח תגובה מהירה לתקלות באמצעות השוואת מומנטים בין כוחות אלקטרומגנטיים מכניים.
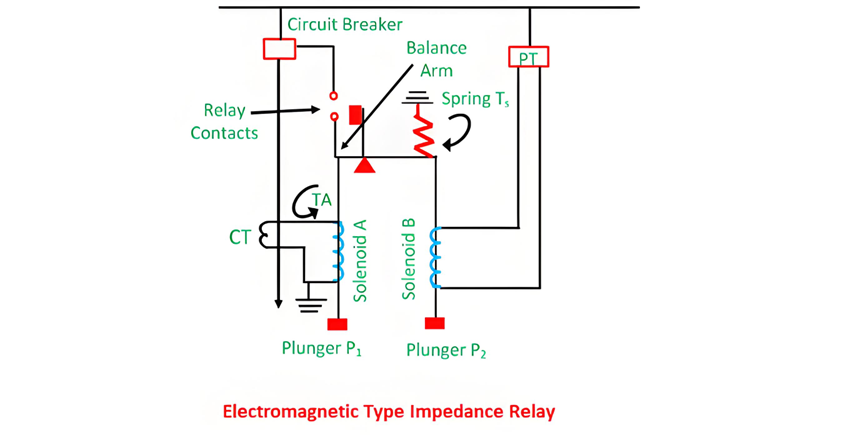
הכוח המופעל על ידי סולנואיד A (אלמנט הזרם) הוא פרופורציונלי ל-<span class="container-pnMYH7 math-inline" data-custom-copy-text="\(I^2\)">, בעוד שהכוח מsolnoid B (אלמנט המתח) הוא פרופורציונלי ל-<span class="container-pnMYH7 math-inline" data-custom-copy-text="\(V^2\)">. כתוצאה מכך, הרליא יפעל כאשר הכוח הנובע מהזרם עולה על הכוח הנובע מהמתח.
הקבועים <span class="container-pnMYH7 math-inline" data-custom-copy-text="\(k_1\)">k1</span> ו-<span class="container-pnMYH7 math-inline" data-custom-copy-text="\(k_2\)">k2</span> תלויים במספר הסיבובים-אמפר של שני הסולנואידים והיחסים של טראנספורמורי המדידה. ניתן להתאים את הגדרות הרליא באמצעות תתי-מגנטים על הסלילים.
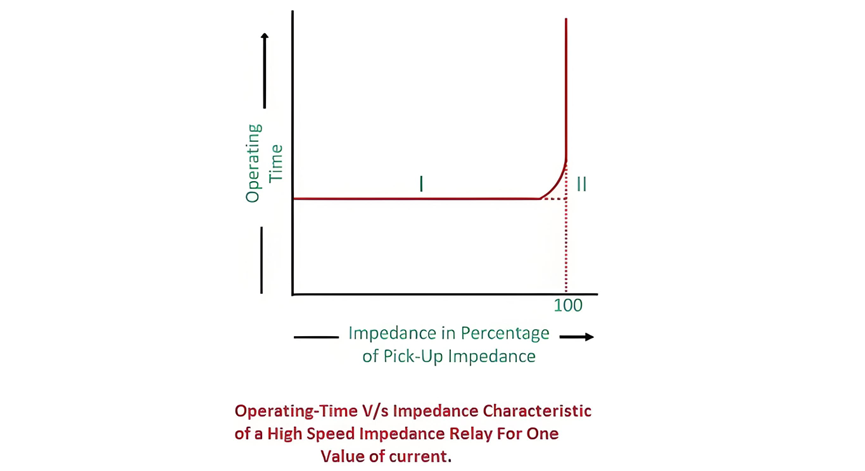
בקו המאפיין, ציר ה-y מייצג את זמן ההפעלה של הרליא, בעוד שציר ה-x מייצג הומפדן. חשוב לציין כי זמן ההפעלה של הרליא נשאר קבוע (מציין פעולה מיידית) עבור הומפדנים בתוך אזור ההגנה שהוגדר מראש. במרחק המוגדר מראש (המתאים להומפדן שהוגדר), ערכי המתח והזרם מתיצבים; מעבר לנקודה זו, ההומפדן המודד באופן תיאורטי נהיה אינסופי, מה שמוריד את הרליא ללא פעולה עבור תקלות מחוץ לתחום ההגנה שלו. הקשר הליניארי בין הומפדן לזמן פעולה מבטיח איתור מהיר ונאמן של תקלות בתוך האזור המוגדר.
רליא הומפדן מסוג השראה
תרשים המעגל של רליא הומפדן מסוג השראה מוצג להלן. הרליא כולל אלמנטים של זרם ומתח, ומכיל דיסק אלומיני שמסתובב בין אלקטרומגנטים.
האלקטרומגנט העליון מכיל שתי סיבוביות שונות: הסיבוב הראשית מחובר לסיבוב الثانوية של טראנספורמורי זרם (CT), בעוד הסיבوب الثانوية מחובר לטראנספורמורי פוטנציאל (PT). ניתן להתאים את הגדרת הזרם של הסיבוב הראשית באמצעות גשר תתי-מגנטים שממוקם מתחת לרליא, מה שמאפשר קליברה מדויקת של רגישות הרליא. אלמנט המתח, מופעל על ידי PT, מייצר שדה מגנטי שמתנגש בשדה הנובע מהזרם של CT.
האינטרקציה הזו מושרת זרמים מסחררים בדיסק האלומיני, ומייצרת מומנט שמדrive את הסיבוב שלו. בהפעלה נורמלית, הדיסק נשאר נייח בשל מומנטים מאוזנים; במהלך תקלה, זרם המתגבר מאוזן את המומנטים, גורם לדיסק לסובב ולפתוח את מגעי הרליא. העיצוב הזה מבטיח איתור מהיר ונאמן של תקלות מבוססות הומפדן במערכות חשמל.
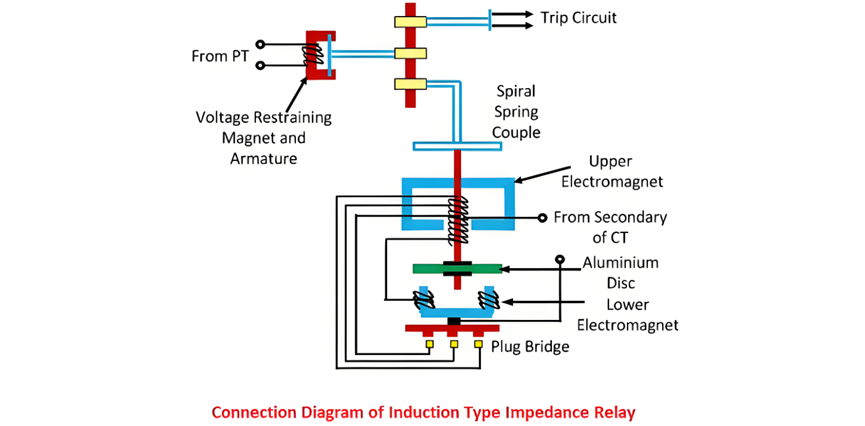
האלקטרומגנטים ברליא מחוברים בטור, כשפלוקס ההשראה שלהם מייצרים מומנט סיבובי שמדrive את הדיסק האלומיני. מגנט קבוע מספק מומנט בקרה ובלימה לשיבוץ תנועת הדיסק.
בהפעלה נורמלית, הכוח על האמפולט עולה על המומנט מהאלמנט ההשראה, ומשאיר את מגעי ההפסקה פתוחים. כאשר מתרחשת תקלה במערכת, הזרם דרך האלקטרומגנטים מתגבר, גורם לדיסק האלומיני לסובב. מהירות הסיבוב של הדיסק היא ישירה פרופורציונלית לזרם התקלה, ומקפצת קפיץ ככל שהיא מסתובבת. תנועת הסיבוב הזו מתגברת secara bertahap terhadap torsi pembatas dari magnet permanen. Ketika rotasi cakram mencapai ambang kritis (yang sesuai dengan impedansi yang ditetapkan), kontak trip menutup, memicu respons perlindungan. Desain ini memastikan bahwa relay bereaksi cepat terhadap gangguan sambil mempertahankan stabilitas selama operasi normal, dengan magnet permanen memberikan kontrol penting atas percepatan dan pengereman cakram untuk mencegah pengecutan palsu.
Sudut rotasi cakram relay bergantung pada gaya armatur, yang berbanding lurus dengan tegangan yang diterapkan. Oleh karena itu, tegangan menentukan sudut rotasi.
Karakteristik Waktu Relay Impedansi Kecepatan Tinggi
Gambar tersebut menunjukkan bahwa relay tidak aktif untuk nilai-nilai yang melebihi 100% dari ambang pickup. Kurva 1 mewakili karakteristik operasional sebenarnya, sementara Kurva 2 menawarkan model sederhana dari Kurva 1. Desain ini memastikan respons cepat terhadap gangguan dalam rentang yang ditetapkan sambil mempertahankan stabilitas dalam kondisi normal. Operasi kecepatan tinggi relay sangat penting untuk meminimalkan kerusakan dalam sistem tenaga, dengan kurva yang disederhanakan memfasilitasi implementasi dan analisis yang lebih mudah dalam pengaturan relay pelindung.
Kelemahan Relay Impedansi Biasa
Berikut adalah kelemahan utama dari relay impedansi:










