RWS-6800 օնլայն ինտելեկտուալ էլեկտրամոտորի սոփահար կամ կապակցված դաշտը

Հիմնական հատկությունները
| Բրենդ | RW Energy |
| Մոդելի համարը | RWS-6800 օնլայն ինտելեկտուալ էլեկտրամոտորի սոփահար կամ կապակցված դաշտը |
| նշված հաճախություն | 50/60Hz |
| Սերիա | RWS |
Սնողի կողմից տրամադրվող ապրանքների նկարագրությունները
Նկարագրություն:
RWS-6800 սեփական սկիզբ և սեփական դաշտը օգտագործում է նոր սեղմ սկիզբի տեխնոլոգիա, և համապատասխան կառավարումը իրականացնում է մոտորի արագացման և դանդաղման կորերի կառավարումը անпрецедент մակարդակով: Սեփական սկիզբը կարդում է մոտորի տվյալները սկսելու և դադարելու ընթացքում, ապա կարգավորում է ստանձնել լավագույն արդյունքը: ียง ընտրեք ձեր բեռի տեսակի համար ամենահամապատասխան կորը, և սեփական սկիզբը ավտոմատ կպարունակի բեռը ամենակայուն ձևով արագացնել:
Հիմնական ֆունկցիաների ներկայացում:
Բաց փուլի պաշտպանություն
Մի քանի սկիզբի ռեժիմներ
Ընթացիկ և գեր սեղմումի պաշտպանություն
Սկիզբի հոսանքի և մեխանիկական ազդեցության կրճատում
Մի քանի պաշտպանություններ և էներգիայի էֆեկտիվության օպտիմիզացիա
Անricht կառուցվածք:

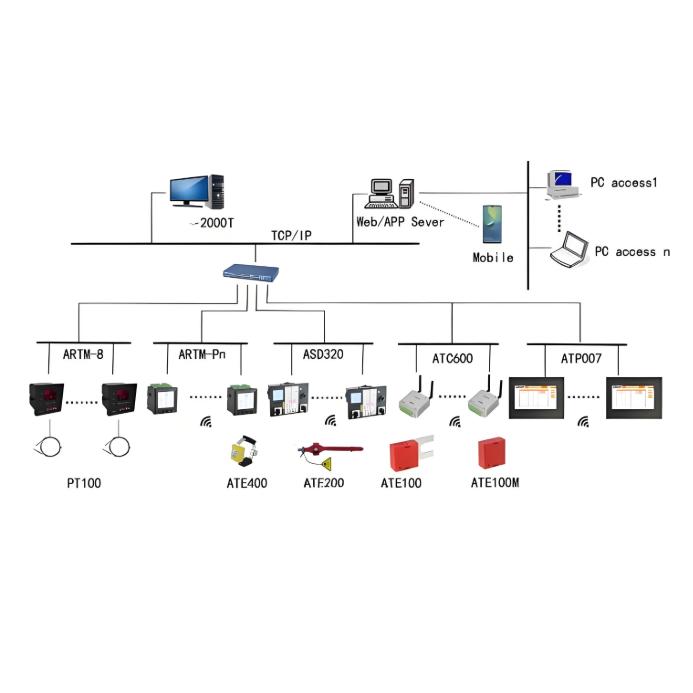
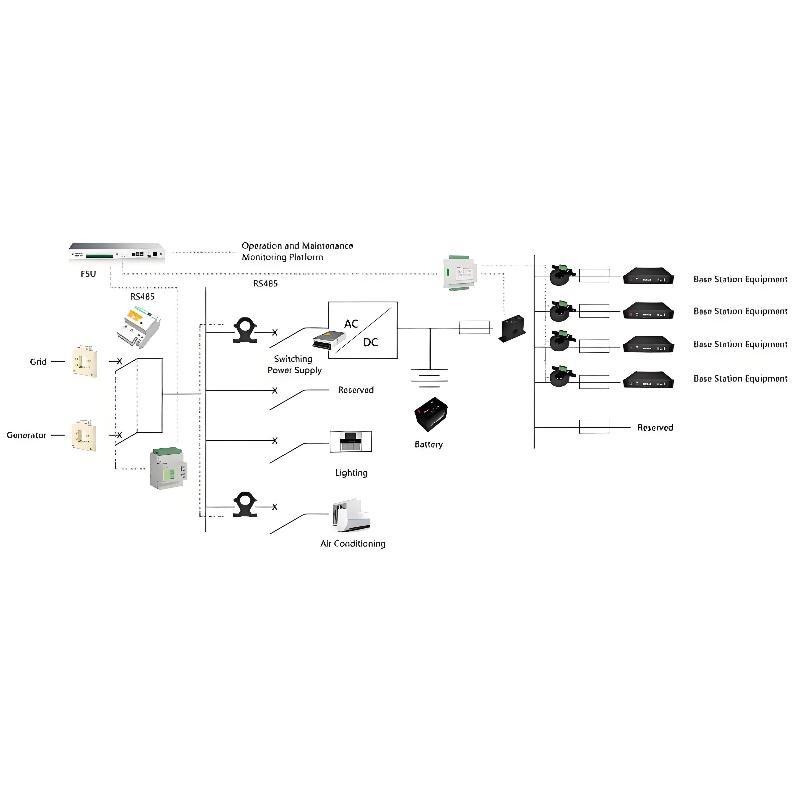
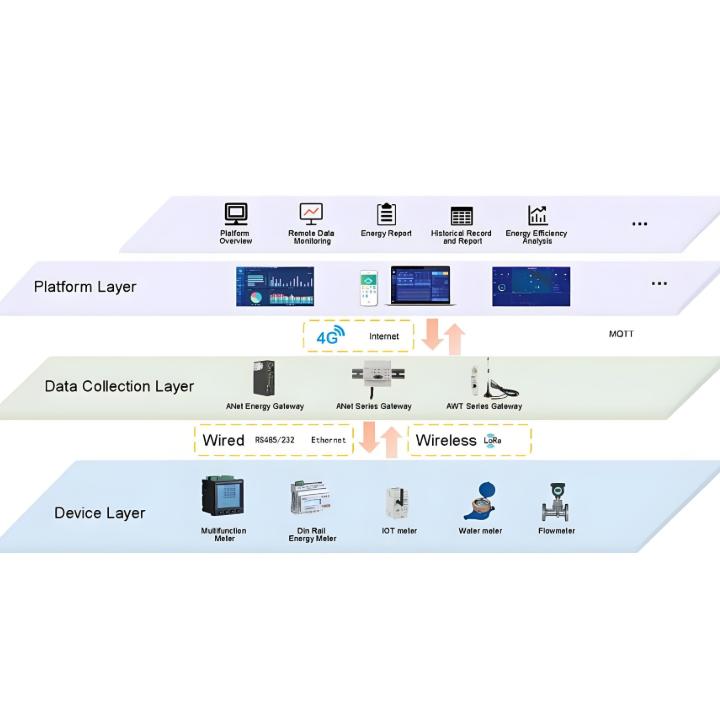
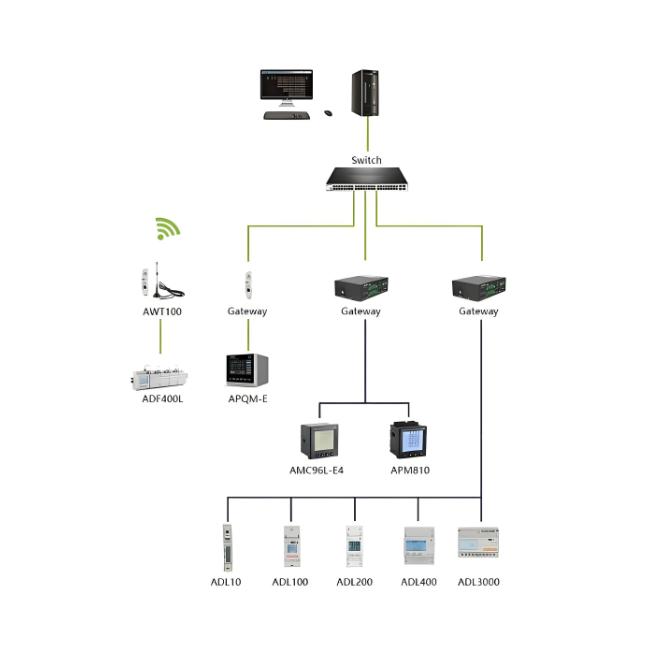
Երազանքային կապի դիագրամ


Q:Ինչ է տարբերությունը VFD և սեփական սկիզբի միջև?
A:Ֆունկցիաներ. VFD-ն կարող է փոփոխել մոտորի արագությունը, սկիզբը և բրեկը փոփոխելով էլեկտրաէներգիայի հաճախությունը և լարումը: Սեփական սկիզբը հիմնականում օգտագործվում է մոտորի հարթ սկիզբի համար, որպեսզի կրճատվի սկիզբի հոսանքի ազդեցությունը, և այն չի ներառում արագության կառավարումը:
Կիրառման դեպքեր. VFD-ն համապատասխանում է այն դեպքերին, որտեղ անհրաժեշտ է արագության կառավարում, ինչպիսիք են նախագծային գծերը, օդային համակարգերը և այլն: Սեփական սկիզբը համապատասխանում է այն սարքավորումներին, որոնք պետք է ունենան հարթ սկիզբ և ոչ որ հատուկ պահանջներ արագության համար, ինչպիսիք են մեծ մասնակի ջրահոսքի պոմպերը և առաջարկող կոմպրեսորները:
Էներգիայի առանձնահատուկ ազդեցություն. VFD-ն էներգիայի կառավարումը իրականացնում է ճշգրիտ արագության կառավարումով և այն ունի զգալի արդյունքներ: Սեփական սկիզբը էներգիայի կառավարումը է արտահայտվում սկիզբի ընթացքում էներգիայի ծախսի կրճատմամբ, և ընդհանուր էներգիայի կառավարման մակարդակը ցածր է VFD-ի համար:
Q:Ինչպե՞ս է աշխատում սեփական սկիզբ ունեցող մոտորի սկիզբը:
A:Սեփական սկիզբ ունեցող մոտորի սկիզբը հիմնված է էլեկտրոնային տեխնոլոգիայի վրա և հաճախ օգտագործում է թիրուստոր լարումը կառավարող շղթա: Սկիզբի ընթացքում այն պարզապես ավելացնում է թիրուստորի հաղորդակցման անկյունը համաձայն սահմանված կորերի (ինչպիսիք են գծային բարձրացումը, շոշափող բարձրացումը, հաստատուն հոսանքը և այլն), որպեսզի մոտորին հաջորդաբար ավելացվի լարումը և մոտորի արագությունը հաստատուն բարձրանա: Երբ մոտորի արագությունը մոտենում է նշված արագության, նշված լարումը դուրս է գալիս և թիրուստորը լիովին հաղորդակցվում է: Որոշ դեպքերում օգտագործվում է շեղված կոնտակտոր, որպեսզի շեղված սկիզբը կրճատվի: Դադարելու ընթացքում լարումը նույնպես կարող է կրճատվել համաձայն կորերի, որպեսզի մոտորը հաստատուն դանդաղանա:

Հարաբերյալ պրոդուկտները
-
Անկայուն 온도 모니터링 시스템 注意:根据要求,这里的翻译应当保持原文的结构和格式不变,但似乎在翻译过程中出现了错误。正确的翻译应该是: Անցկացվող ջերմաստիճանի դիտարկման համակարգ
-
Հիմնական ստացիոնի էներգիայի ծախսի վերլուծություն
-
Էներգիայի эффективության ẢN lýական համակարգ
-
Էլեկտրաէներգիայի Մոնիթորինգ Սիստեմ

-
Էներգիայի ẢNagement System
-
ALP300 Մոտորի պաշտպանության կոնտրոլերը

-
ARD3 մոտորի պաշտպանության կոնտրոլեր

Հարաբերյալ գիտելիքներ
-
 Ինչ են այն գործոնները, որոնք կազմակերպում են կարիքը 10կՎ բաշխման գծերի վրա հորիզոնի ազդեցությունը1. Հագնված կատարյալ կեղևի ազդեցությամբ առաջացած կոշտ լարվածությունՀագնված կատարյալ կեղևի ազդեցությամբ առաջացած կոշտ լարվածությունը հանդիսանում է առաջացած կոշտ լարվածություն վերը գտնվող բաշխման գծերում կարգավիճակով կատարյալ կեղևի հարևանությամբ լուսաբող առաջացման պատճառով, նույնիսկ երբ գիծը ոչ ոք չի հարում ուղիղ։ Երբ կատարյալ կեղևի փոլուց տեղի է ունենում կարգավիճակով կատարյալ կեղևի հարում, այն համակարգիչների վրա առաջացնում է մեծ քանակությամբ լարվածություն՝ հակառակ պոլուսայինությամբ կեղևի լիցքին:ՎիEcho11/03/2025
Ինչ են այն գործոնները, որոնք կազմակերպում են կարիքը 10կՎ բաշխման գծերի վրա հորիզոնի ազդեցությունը1. Հագնված կատարյալ կեղևի ազդեցությամբ առաջացած կոշտ լարվածությունՀագնված կատարյալ կեղևի ազդեցությամբ առաջացած կոշտ լարվածությունը հանդիսանում է առաջացած կոշտ լարվածություն վերը գտնվող բաշխման գծերում կարգավիճակով կատարյալ կեղևի հարևանությամբ լուսաբող առաջացման պատճառով, նույնիսկ երբ գիծը ոչ ոք չի հարում ուղիղ։ Երբ կատարյալ կեղևի փոլուց տեղի է ունենում կարգավիճակով կատարյալ կեղևի հարում, այն համակարգիչների վրա առաջացնում է մեծ քանակությամբ լարվածություն՝ հակառակ պոլուսայինությամբ կեղևի լիցքին:ՎիEcho11/03/2025 -
 Compact Air-Insulated RMUs for Retrofit & New Substations Կոմպակտ արիային իզոլացված RMU-եր վերասահմանման և նոր ենթակայանների համարՀավանդական օդով պաշտպանված օղակաձև գլխավոր միավորները (RMU-ները) սահմանվում են կոմպակտ գազով պաշտպանված RMU-ների հակառակությամբ: Առաջին օդով պաշտպանված RMU-ները օգտագործում էին VEI-ի վակուումային կամ փուչացնող բեռնավորման սահնակներ, ինչպես նաև գազային ստեղծող բեռնավորման սահնակներ: Ավելի ուշ, SM6 շարքի լայն ընդունումից հետո, դա դարձավ օդով պաշտպանված RMU-ների հիմնական լուծումը: Մյուս օդով պաշտպանված RMU-ների նման, կարևոր տարբերությունը կայանում է բեռնավորման սահնակի SF6-ով ներսում փակված տեսակիEcho11/03/2025
Compact Air-Insulated RMUs for Retrofit & New Substations Կոմպակտ արիային իզոլացված RMU-եր վերասահմանման և նոր ենթակայանների համարՀավանդական օդով պաշտպանված օղակաձև գլխավոր միավորները (RMU-ները) սահմանվում են կոմպակտ գազով պաշտպանված RMU-ների հակառակությամբ: Առաջին օդով պաշտպանված RMU-ները օգտագործում էին VEI-ի վակուումային կամ փուչացնող բեռնավորման սահնակներ, ինչպես նաև գազային ստեղծող բեռնավորման սահնակներ: Ավելի ուշ, SM6 շարքի լայն ընդունումից հետո, դա դարձավ օդով պաշտպանված RMU-ների հիմնական լուծումը: Մյուս օդով պաշտպանված RMU-ների նման, կարևոր տարբերությունը կայանում է բեռնավորման սահնակի SF6-ով ներսում փակված տեսակիEcho11/03/2025 -
 Ստանդարտները և LTAC փորձի հաշվարկը էլեկտրական ձեռախոտների համար1 ՆերածությունՀամաձայն պատերազմական GB/T 1094.3-2017 ստանդարտի դրույթների, էլեկտրական փոխհողոցների գծային վերջին հաշվառման հողով հողով բարձր լարման (LTAC) փորձը նպատակում է գնահատել բարձր լարման витка до земли. Оно не предназначено для оценки межвитковой изоляции или фазовой изоляции.Այլ իզոլացիայի փորձերի (օրինակ, լուսային արագ արժեքի լարման լուսային արագ արժեքի լարման կամ փոփոխական լարման փորձեր) համեմատ, LTAC փորձը նպատակում է ավելի խիստ գնահատել բարձր լարման վիթկային վերջին հաշվառման, բարձրOliver Watts11/03/2025
Ստանդարտները և LTAC փորձի հաշվարկը էլեկտրական ձեռախոտների համար1 ՆերածությունՀամաձայն պատերազմական GB/T 1094.3-2017 ստանդարտի դրույթների, էլեկտրական փոխհողոցների գծային վերջին հաշվառման հողով հողով բարձր լարման (LTAC) փորձը նպատակում է գնահատել բարձր լարման витка до земли. Оно не предназначено для оценки межвитковой изоляции или фазовой изоляции.Այլ իզոլացիայի փորձերի (օրինակ, լուսային արագ արժեքի լարման լուսային արագ արժեքի լարման կամ փոփոխական լարման փորձեր) համեմատ, LTAC փորձը նպատակում է ավելի խիստ գնահատել բարձր լարման վիթկային վերջին հաշվառման, բարձրOliver Watts11/03/2025 -
 Ինչպես վակուումային տեխնոլոգիան փոխարինում է SF6-ը ժամանակակից օղակաձև գլխավոր միավորներումՄիացման հղումները (RMU) օգտագործվում են երկրորդային էլեկտրաէներգիայի բաշխման համար, ուղղակիորեն կապված են վերջնապատճառների հետ, ինչպիսիք են հողատարածային համայնքները, կառուցվածքները, առևտրային շենքերը, ավտոմагիստրալները և այլն:Հողատարածային ենթակայանում RMU-ն ներառում է 12 kV միջին լարվածությունը, որը հետո փոխվում է 380 V ցածր լարվածության ձեռնարկանների միջոցով: Ցածր լարվածության սիչակը էլեկտրաէներգիան բաշխում է տարբեր օգտագործող միավորներին: 1250 kVA բաշխման ձեռնարկանի համար հողատարածային համայJames11/03/2025
Ինչպես վակուումային տեխնոլոգիան փոխարինում է SF6-ը ժամանակակից օղակաձև գլխավոր միավորներումՄիացման հղումները (RMU) օգտագործվում են երկրորդային էլեկտրաէներգիայի բաշխման համար, ուղղակիորեն կապված են վերջնապատճառների հետ, ինչպիսիք են հողատարածային համայնքները, կառուցվածքները, առևտրային շենքերը, ավտոմагիստրալները և այլն:Հողատարածային ենթակայանում RMU-ն ներառում է 12 kV միջին լարվածությունը, որը հետո փոխվում է 380 V ցածր լարվածության ձեռնարկանների միջոցով: Ցածր լարվածության սիչակը էլեկտրաէներգիան բաշխում է տարբեր օգտագործող միավորներին: 1250 kVA բաշխման ձեռնարկանի համար հողատարածային համայJames11/03/2025 -
 Որոնց են փոխհոլովորի գազ (Բուխհոլց) պաշտպանման ակտիվացման հետևող դիմաբանություններըԻնչ են ձեռնարկությունները հոլված փոխանցման գազ (Բուխոլցի) պաշտպանության ակտիվացվելուց հետո:Երբ հոլված փոխանցման գազ (Բուխոլցի) պաշտպանության սարքը գործում է, անմիջապես պետք է կատարվի խիստ ստուգում, զգույշ վերլուծություն և ճշգրիտ գնահատական, հետո կիրառել համապատասխան ուղղող գործողությունները:1. Երբ գազ պաշտպանության աշխատանքային ալարմը ակտիվացվում էԳազ պաշտպանության ալարմի ակտիվացվելուց հետո պետք է անմիջապես ստուգել հոլված փոխանցը և որոշել գործողության պատճառը։ Ստուգեք արդյոք այն պատճառվել է. ԱկկFelix Spark11/01/2025
Որոնց են փոխհոլովորի գազ (Բուխհոլց) պաշտպանման ակտիվացման հետևող դիմաբանություններըԻնչ են ձեռնարկությունները հոլված փոխանցման գազ (Բուխոլցի) պաշտպանության ակտիվացվելուց հետո:Երբ հոլված փոխանցման գազ (Բուխոլցի) պաշտպանության սարքը գործում է, անմիջապես պետք է կատարվի խիստ ստուգում, զգույշ վերլուծություն և ճշգրիտ գնահատական, հետո կիրառել համապատասխան ուղղող գործողությունները:1. Երբ գազ պաշտպանության աշխատանքային ալարմը ակտիվացվում էԳազ պաշտպանության ալարմի ակտիվացվելուց հետո պետք է անմիջապես ստուգել հոլված փոխանցը և որոշել գործողության պատճառը։ Ստուգեք արդյոք այն պատճառվել է. ԱկկFelix Spark11/01/2025 -
 Ինչ է THD-ն: Ինչպես ազդում է էլեկտրաէներգիայի որակի և iếtվածքի վրաԷլեկտրատեխնիկայի ոլորտում էլեկտրաէներգիայի համակարգերի կայունությունը և հավասարակշռությունը ունեն առավելագույն կարևորություն: Էլեկտրաէներգիայի էլեկտրոնիկ տեխնոլոգիայի զարգացման հետ ոչ գծային բեռների լայն օգտագործումը հանգեցրել է էլեկտրաէներգիայի համակարգերում համարիչային դեֆորմացիայի ավելի հաճախ հանդիպող խնդրի:.THD-ի սահմանումըԸնդհանուր համարիչային դեֆորմացիան (THD) սահմանվում է որպես բոլոր համարիչային կազմումների քառակուսային միջին արժեքը հիմնական կազմումի քառակուսային միջին արժեքի հարաբերությոEncyclopedia11/01/2025
Ինչ է THD-ն: Ինչպես ազդում է էլեկտրաէներգիայի որակի և iếtվածքի վրաԷլեկտրատեխնիկայի ոլորտում էլեկտրաէներգիայի համակարգերի կայունությունը և հավասարակշռությունը ունեն առավելագույն կարևորություն: Էլեկտրաէներգիայի էլեկտրոնիկ տեխնոլոգիայի զարգացման հետ ոչ գծային բեռների լայն օգտագործումը հանգեցրել է էլեկտրաէներգիայի համակարգերում համարիչային դեֆորմացիայի ավելի հաճախ հանդիպող խնդրի:.THD-ի սահմանումըԸնդհանուր համարիչային դեֆորմացիան (THD) սահմանվում է որպես բոլոր համարիչային կազմումների քառակուսային միջին արժեքը հիմնական կազմումի քառակուսային միջին արժեքի հարաբերությոEncyclopedia11/01/2025
Հարակից լուծումներ
-
 Բաշխման ավտոմատացման համակարգերի լուծումներըՈ՞ր դեմքերն են գոյացնում վերևի գծի էքսպլուատացիայի և հաստատումը:Դեմք մեկ:Բաշխման ქալվածքի վերևի գծերը լայն տարածքով են, բարդ ռելիեֆ ունեն, շատ ճառագայթային ճյուղեր և բաշխված էլեկտրաէներգական համակարգեր, որոնք առաջ են բերում գծային անհաստատունություններ և դժվար են սխալները հայտնաբերել:Դեմք երկու:Ձեռնային սխալների հայտնաբերումը կարուտ է և կարուտ է: Միաժամանակ գծի հոսանքը, լարումը և սկզբունքը չի կարող հաստատում է իրական ժամանակում հասնել, քանի որ չկա ինտելեկտուալ տեխնոլոգիական միջոցներ:Դեմք երեք:ԳծRW Energy04/22/2025
Բաշխման ավտոմատացման համակարգերի լուծումներըՈ՞ր դեմքերն են գոյացնում վերևի գծի էքսպլուատացիայի և հաստատումը:Դեմք մեկ:Բաշխման ქալվածքի վերևի գծերը լայն տարածքով են, բարդ ռելիեֆ ունեն, շատ ճառագայթային ճյուղեր և բաշխված էլեկտրաէներգական համակարգեր, որոնք առաջ են բերում գծային անհաստատունություններ և դժվար են սխալները հայտնաբերել:Դեմք երկու:Ձեռնային սխալների հայտնաբերումը կարուտ է և կարուտ է: Միաժամանակ գծի հոսանքը, լարումը և սկզբունքը չի կարող հաստատում է իրական ժամանակում հասնել, քանի որ չկա ինտելեկտուալ տեխնոլոգիական միջոցներ:Դեմք երեք:ԳծRW Energy04/22/2025 -
 Միացված հոգեբանական էլեկտրաէներգիայի սպառումի և էներգետիկ էֆեկտիվության ẢNIXIE-IEE-Business ընդհանուր լուծումԸնդհանուր նկարագրությունԱյս լուծումը նպատակ է ունենում ներկայացնել ինтелиգենտ էլեկտրաէներգիայի վերլուծական համակարգ (Power Management System, PMS), որը կենտրոնացած է էլեկտրաէներգիայի ռեսուրսների վերջ-վերջ օպտիմիզացիայի շուրջ։ Միացնելով "դիտում-վերլուծություն-որոշում-կատարում" փակ շղթայի մանրամասները, այն օգնում է ընկերություններին անցնել պարզապես էլեկտրաէներգիայի օգտագործման ինտելեկտուալ էլեկտրաէներգիայի կառավարման, վերջնապես հասնելով անվտանգ, արդյունավետ, ցածր կարբոնային և տնտեսական էներգիայի օRW Energy09/28/2025
Միացված հոգեբանական էլեկտրաէներգիայի սպառումի և էներգետիկ էֆեկտիվության ẢNIXIE-IEE-Business ընդհանուր լուծումԸնդհանուր նկարագրությունԱյս լուծումը նպատակ է ունենում ներկայացնել ինтелиգենտ էլեկտրաէներգիայի վերլուծական համակարգ (Power Management System, PMS), որը կենտրոնացած է էլեկտրաէներգիայի ռեսուրսների վերջ-վերջ օպտիմիզացիայի շուրջ։ Միացնելով "դիտում-վերլուծություն-որոշում-կատարում" փակ շղթայի մանրամասները, այն օգնում է ընկերություններին անցնել պարզապես էլեկտրաէներգիայի օգտագործման ինտելեկտուալ էլեկտրաէներգիայի կառավարման, վերջնապես հասնելով անվտանգ, արդյունավետ, ցածր կարբոնային և տնտեսական էներգիայի օRW Energy09/28/2025 -
 Նոր մոդուլային հետևելու լուծում ֆոտովոլտային և էներգիայի պահեստավորման էլեկտրաէներգիայի համակարգերի համար1. Ներածություն և հետազոտական հիմնավորում1.1 Սոլային գործարանի ներկայիս վիճակըՈրպես ամենաբազմանիշ վաղական էներգիայի աղբյուրներից մեկը, սոլային էներգիայի զարգացումը և օգտագործումը դարձել է համաշխարհային էներգետիկ փոփոխության կենտրոնական հարց: Վերջին տարիների ընթացքում, աշխարհի տարբեր երկրների քաղաքականությունների շնորհիվ, ֆոտովոլտային (PV) գործարանը փորձել է ծառայաց աճ: Ավելին, վիճակագրական տվյալները ցույց են տալիս, որ Չինաստանի PV գործարանը ներկայումս դարձել է 168-անգամ ավելի մեծ ըստ «12-րդ ՀինգRW Energy09/28/2025
Նոր մոդուլային հետևելու լուծում ֆոտովոլտային և էներգիայի պահեստավորման էլեկտրաէներգիայի համակարգերի համար1. Ներածություն և հետազոտական հիմնավորում1.1 Սոլային գործարանի ներկայիս վիճակըՈրպես ամենաբազմանիշ վաղական էներգիայի աղբյուրներից մեկը, սոլային էներգիայի զարգացումը և օգտագործումը դարձել է համաշխարհային էներգետիկ փոփոխության կենտրոնական հարց: Վերջին տարիների ընթացքում, աշխարհի տարբեր երկրների քաղաքականությունների շնորհիվ, ֆոտովոլտային (PV) գործարանը փորձել է ծառայաց աճ: Ավելին, վիճակագրական տվյալները ցույց են տալիս, որ Չինաստանի PV գործարանը ներկայումս դարձել է 168-անգամ ավելի մեծ ըստ «12-րդ ՀինգRW Energy09/28/2025







