RWS-6800 օնլայն ինտելեկտուալ էլեկտրամոտորի սոփահար կամ կապակցված դաշտը

Հիմնական հատկությունները
| Բրենդ | RW Energy |
| Մոդելի համարը | RWS-6800 օնլայն ինտելեկտուալ էլեկտրամոտորի սոփահար կամ կապակցված դաշտը |
| նշված հաճախություն | 50/60Hz |
| Սերիա | RWS |
Սնողի կողմից տրամադրվող ապրանքների նկարագրությունները
Նկարագրություն:
RWS-6800 սեփական սկիզբ և սեփական դաշտը օգտագործում է նոր սեղմ սկիզբի տեխնոլոգիա, և համապատասխան կառավարումը իրականացնում է մոտորի արագացման և դանդաղման կորերի կառավարումը անпрецедент մակարդակով: Սեփական սկիզբը կարդում է մոտորի տվյալները սկսելու և դադարելու ընթացքում, ապա կարգավորում է ստանձնել լավագույն արդյունքը: ียง ընտրեք ձեր բեռի տեսակի համար ամենահամապատասխան կորը, և սեփական սկիզբը ավտոմատ կպարունակի բեռը ամենակայուն ձևով արագացնել:
Հիմնական ֆունկցիաների ներկայացում:
Բաց փուլի պաշտպանություն
Մի քանի սկիզբի ռեժիմներ
Ընթացիկ և գեր սեղմումի պաշտպանություն
Սկիզբի հոսանքի և մեխանիկական ազդեցության կրճատում
Մի քանի պաշտպանություններ և էներգիայի էֆեկտիվության օպտիմիզացիա
Անricht կառուցվածք:

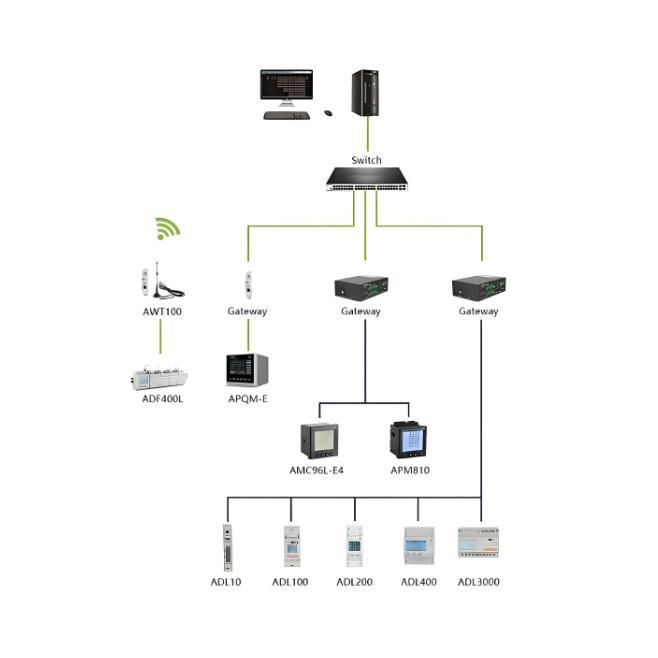
Երազանքային կապի դիագրամ


Q:Ինչ է տարբերությունը VFD և սեփական սկիզբի միջև?
A:Ֆունկցիաներ. VFD-ն կարող է փոփոխել մոտորի արագությունը, սկիզբը և բրեկը փոփոխելով էլեկտրաէներգիայի հաճախությունը և լարումը: Սեփական սկիզբը հիմնականում օգտագործվում է մոտորի հարթ սկիզբի համար, որպեսզի կրճատվի սկիզբի հոսանքի ազդեցությունը, և այն չի ներառում արագության կառավարումը:
Կիրառման դեպքեր. VFD-ն համապատասխանում է այն դեպքերին, որտեղ անհրաժեշտ է արագության կառավարում, ինչպիսիք են նախագծային գծերը, օդային համակարգերը և այլն: Սեփական սկիզբը համապատասխանում է այն սարքավորումներին, որոնք պետք է ունենան հարթ սկիզբ և ոչ որ հատուկ պահանջներ արագության համար, ինչպիսիք են մեծ մասնակի ջրահոսքի պոմպերը և առաջարկող կոմպրեսորները:
Էներգիայի առանձնահատուկ ազդեցություն. VFD-ն էներգիայի կառավարումը իրականացնում է ճշգրիտ արագության կառավարումով և այն ունի զգալի արդյունքներ: Սեփական սկիզբը էներգիայի կառավարումը է արտահայտվում սկիզբի ընթացքում էներգիայի ծախսի կրճատմամբ, և ընդհանուր էներգիայի կառավարման մակարդակը ցածր է VFD-ի համար:
Q:Ինչպե՞ս է աշխատում սեփական սկիզբ ունեցող մոտորի սկիզբը:
A:Սեփական սկիզբ ունեցող մոտորի սկիզբը հիմնված է էլեկտրոնային տեխնոլոգիայի վրա և հաճախ օգտագործում է թիրուստոր լարումը կառավարող շղթա: Սկիզբի ընթացքում այն պարզապես ավելացնում է թիրուստորի հաղորդակցման անկյունը համաձայն սահմանված կորերի (ինչպիսիք են գծային բարձրացումը, շոշափող բարձրացումը, հաստատուն հոսանքը և այլն), որպեսզի մոտորին հաջորդաբար ավելացվի լարումը և մոտորի արագությունը հաստատուն բարձրանա: Երբ մոտորի արագությունը մոտենում է նշված արագության, նշված լարումը դուրս է գալիս և թիրուստորը լիովին հաղորդակցվում է: Որոշ դեպքերում օգտագործվում է շեղված կոնտակտոր, որպեսզի շեղված սկիզբը կրճատվի: Դադարելու ընթացքում լարումը նույնպես կարող է կրճատվել համաձայն կորերի, որպեսզի մոտորը հաստատուն դանդաղանա:
Այո, այն ինտեգրում է բազմաթիվ պահպանություններ, ինչպիսիք են փուլի կորցումը, գերծանցումը, ներծանցումը, գերբեռնումը, սեղմած ռոտորը, գերջերմությունը և օպտիմիզացնում է էներգիայի ծախսը մոտորների և մեքենաների կշռային ժամկետը երկարացնելու համար:
Այն ավտոմատ կերպով կարգավորում է թիրիստորների հղումի անկյունը և համադրում է բեռի հատկությունները (ինչպես հաստատուն շրջանային ուժ և քառակուսային շրջանային ուժ) մոտավորապես ստանալով իրական ժամանակի լարում, հոսանք և արագության տվյալները դիմացի մշակման ընթացքում, որպեսզի ստանա օպտիմալ արագացման կոր։
RWS-6800 նախատեսված է միայն հարթ սկսնակ դադարի համար և չի կարողացնում կարգավորել արագությունը. angkan VFD-ն կարող է կարգավորել արագությունը ամբողջ պրոցեսի ընթացքում: Եթե ջրավորակները, վերացիկները և կոմպրեսորները պահանջում են միայն սկսնակ շոկի կրճատում և գործողության ընթացքում փոփոխական արագություն չեն պահանջում, ապա փոքր սկսնակները ավելի տնտեսական և արդյունավետ են:

Հարաբերյալ պրոդուկտները
-
Ինտելեկտուալ կրկնակի էլեկտրական հզորության կոնտրոլեր

-
Ընդհանուր պաշտպանական սարք

-
RWS-7000 ներդրված շեղումով էլեկտրաշարժիչի փոքրացնող սկզբացուցիչ

-
Լայնության հատվածի բեռը կտրող սահմանազգեսի կառավարող

-
RWJS մասնակի էլեկտրական հոսքի գծային դիմացի համակարգը օղակաձև գլխավոր միավորների համար

-
RWB-7000L գիծի պաշտպանության չափման և կառ soátի սարք

-
Ալիմանացումի վերջնակյան միավոր

Հարաբերյալ գիտելիքներ
-
 Հիմնական վերլուծիչի անհաջողությունները և թեթև գազի աշխատանքային հարցերը1. Դեպքի գրանցում (2019 թվականի մարտի 19)2019 թվականի մարտի 19-ին ժամը 16:13-ին մոնիտորինգի ֆոնը հաղորդել է 3-րդ գլխավոր տրանսֆորմատորի թեթև գազի աշխատանքի մասին: Համաձայն «Էլեկտրական տրանսֆորմատորների շահագործման կանոնակարգի» (DL/T572-2010), շահագործման և սպասարկման (O&M) անձնակազմը ստուգել է 3-րդ գլխավոր տրանսֆորմատորի վայրում գտնվելու վիճակը:Վայրում հաստատում. 3-րդ գլխավոր տրանսֆորմատորի WBH ոչ էլեկտրական պաշտպանության վահանակը հաղորդել է տրանսֆորմատորի մարմնի B փուլի թեթև գազի աշխատանքի02/05/2026
Հիմնական վերլուծիչի անհաջողությունները և թեթև գազի աշխատանքային հարցերը1. Դեպքի գրանցում (2019 թվականի մարտի 19)2019 թվականի մարտի 19-ին ժամը 16:13-ին մոնիտորինգի ֆոնը հաղորդել է 3-րդ գլխավոր տրանսֆորմատորի թեթև գազի աշխատանքի մասին: Համաձայն «Էլեկտրական տրանսֆորմատորների շահագործման կանոնակարգի» (DL/T572-2010), շահագործման և սպասարկման (O&M) անձնակազմը ստուգել է 3-րդ գլխավոր տրանսֆորմատորի վայրում գտնվելու վիճակը:Վայրում հաստատում. 3-րդ գլխավոր տրանսֆորմատորի WBH ոչ էլեկտրական պաշտպանության վահանակը հաղորդել է տրանսֆորմատորի մարմնի B փուլի թեթև գազի աշխատանքի02/05/2026 -
 10կՎ բաշխման գծերում միափուլային երկրացման սխալները և դրանց վիճակագրությունըՄիափուլ հողակցման վթարումների բնութագրերը և հայտնաբերման սարքերը1. Միափուլ հողակցման վթարումների բնութագրերըԿենտրոնական ձայնային և լուսային զգուշացման ազդանշաններ.Զգուշացման զանգը հնչում է, իսկ «[X] կՎ վահանակի [Y] հատվածում հողակցման վթարում» գրությամբ ցուցադրապանակը լուսավորվում է։ Պետերսենի կոճակով (աղեղի ճնշման կոճակ) չեզոք կետը հողակցված համակարգերում «Պետերսենի կոճակը աշխատում է» ցուցադրապանակը նույնպես լուսավորվում է։Իզոլյացիայի մոնիտորինգի վոլտմետրի ցուցմունքներ.Վթարված փուլի լարումը նվա01/30/2026
10կՎ բաշխման գծերում միափուլային երկրացման սխալները և դրանց վիճակագրությունըՄիափուլ հողակցման վթարումների բնութագրերը և հայտնաբերման սարքերը1. Միափուլ հողակցման վթարումների բնութագրերըԿենտրոնական ձայնային և լուսային զգուշացման ազդանշաններ.Զգուշացման զանգը հնչում է, իսկ «[X] կՎ վահանակի [Y] հատվածում հողակցման վթարում» գրությամբ ցուցադրապանակը լուսավորվում է։ Պետերսենի կոճակով (աղեղի ճնշման կոճակ) չեզոք կետը հողակցված համակարգերում «Պետերսենի կոճակը աշխատում է» ցուցադրապանակը նույնպես լուսավորվում է։Իզոլյացիայի մոնիտորինգի վոլտմետրի ցուցմունքներ.Վթարված փուլի լարումը նվա01/30/2026 -
 Միջանցքային կետի կողմնակցության գործողության ռեժիմը 110կՎ-220կՎ էլեկտրաէներգետիկ ցանցերի ձեռնարկավորների համար110կՎ-220կՎ էլեկտրական ցանցի ձգողական վերադամների նեյտրալ կետի կենտրոնացման ռեժիմը պետք է բավարարի ձգողական վերադամների նեյտրալ կետերի իզոլացիայի կարևորության պահանջներին և պետք է փորձում լինի պահել սեղանների զրոյական հաջորդականության իմպեդանսը հիմնականում անփոփոխ, ինչպես նաև պահանջվում է, որ համակարգի ցանկացած կողմնակցության կետում զրոյական համամիտ իմպեդանսը չգերազանցի դրական հաջորդականության համամիտ իմպեդանսի երեք անգամ։Նոր կառուցվող և տեխնոլոգիական վերանորոգման նպատակով նախատեսված 220կՎ և 11001/29/2026
Միջանցքային կետի կողմնակցության գործողության ռեժիմը 110կՎ-220կՎ էլեկտրաէներգետիկ ցանցերի ձեռնարկավորների համար110կՎ-220կՎ էլեկտրական ցանցի ձգողական վերադամների նեյտրալ կետի կենտրոնացման ռեժիմը պետք է բավարարի ձգողական վերադամների նեյտրալ կետերի իզոլացիայի կարևորության պահանջներին և պետք է փորձում լինի պահել սեղանների զրոյական հաջորդականության իմպեդանսը հիմնականում անփոփոխ, ինչպես նաև պահանջվում է, որ համակարգի ցանկացած կողմնակցության կետում զրոյական համամիտ իմպեդանսը չգերազանցի դրական հաջորդականության համամիտ իմպեդանսի երեք անգամ։Նոր կառուցվող և տեխնոլոգիական վերանորոգման նպատակով նախատեսված 220կՎ և 11001/29/2026 -
 Ինչու օգտագործում են սենյակները քարներ, լողավազուկ, փոքր քարեր և կորցված քար։Ինչու՞ են ենթակայաններում օգտագործվում քարեր, խճաքարեր, փոքրիկ քարեր և մասնատված քարերԵնթակայաններում հզորության և բաշխման տրանսֆորմատորներ, հաղորդալայնակներ, լարման տրանսֆորմատորներ, հոսանքի տրանսֆորմատորներ և անջատիչ սարքեր նման սարքավորումները բոլորն էլ պահանջում են հողաշարժում։ Հողաշարժման վրա հիմնված՝ հիմա մենք մանրամասն կքննարկենք, թե ինչու են ենթակայաններում հաճախ օգտագործվում խճաքարեր և մասնատված քարեր։ Չնայած դրանք սովորական երևում են, սակայն այս քարերը կատարում են կրիտիկական անվտանգութ01/29/2026
Ինչու օգտագործում են սենյակները քարներ, լողավազուկ, փոքր քարեր և կորցված քար։Ինչու՞ են ենթակայաններում օգտագործվում քարեր, խճաքարեր, փոքրիկ քարեր և մասնատված քարերԵնթակայաններում հզորության և բաշխման տրանսֆորմատորներ, հաղորդալայնակներ, լարման տրանսֆորմատորներ, հոսանքի տրանսֆորմատորներ և անջատիչ սարքեր նման սարքավորումները բոլորն էլ պահանջում են հողաշարժում։ Հողաշարժման վրա հիմնված՝ հիմա մենք մանրամասն կքննարկենք, թե ինչու են ենթակայաններում հաճախ օգտագործվում խճաքարեր և մասնատված քարեր։ Չնայած դրանք սովորական երևում են, սակայն այս քարերը կատարում են կրիտիկական անվտանգութ01/29/2026 -
 Ինչու ձեռնարկի միայն մեկ կետում պետք է լինի գերազանց հղումը։ Չէ՞ որ բազմակետային հղումը ավելի հավասարակշռ է։Պատճառները, որոնց պահանջվում է սեփական լինել տրանսֆորմատորի միջոցով:Հեղինակային գործառումը տեղի է ունենում բազմաշրջանային էլեկտրական դաշտում, որտեղ տրանսֆորմատորի միջոցը, ինչպես նաև մետաղային կառուցվածքները, մասերը և կոմպոնենտները, որոնք կապված են միջոցի և շղթայի հետ, ստանում են հարաբերականորեն բարձր պոտենցիալ երկրաչափության նկատմամբ։ Եթե միջոցը չի սեփական, միջոցի և սեփական կայունացող կառուցվածքների և տանկի միջև կգոյանա պոտենցիալ տարբերություն, որը կարող է առաջացնել խառն դեպքեր։Ավելին, գործառում01/29/2026
Ինչու ձեռնարկի միայն մեկ կետում պետք է լինի գերազանց հղումը։ Չէ՞ որ բազմակետային հղումը ավելի հավասարակշռ է։Պատճառները, որոնց պահանջվում է սեփական լինել տրանսֆորմատորի միջոցով:Հեղինակային գործառումը տեղի է ունենում բազմաշրջանային էլեկտրական դաշտում, որտեղ տրանսֆորմատորի միջոցը, ինչպես նաև մետաղային կառուցվածքները, մասերը և կոմպոնենտները, որոնք կապված են միջոցի և շղթայի հետ, ստանում են հարաբերականորեն բարձր պոտենցիալ երկրաչափության նկատմամբ։ Եթե միջոցը չի սեփական, միջոցի և սեփական կայունացող կառուցվածքների և տանկի միջև կգոյանա պոտենցիալ տարբերություն, որը կարող է առաջացնել խառն դեպքեր։Ավելին, գործառում01/29/2026 -
 Ինչպես հասկանալ ձգողական դիմացույցի նեյտրալ կապըI. Ի՞նչ է նեյտրալ կետը:Շառավիղներում և գեներատորներում նեյտրալ կետը շառավիղների մեջ գտնվող հատուկ կետն է, որտեղ այդ կետի և յուրաքանչյուր արտաքին վերջակետի միջև բացարձակ լարումը հավասար է: Ստորև բերված դիագրամումOկետը ներկայացնում է նեյտրալ կետը:II. Ինչու՞ է նեյտրալ կետը պետք է հողագործվի:Եռաֆազ փոփոխական հոսանքի էլեկտրական համակարգում նեյտրալ կետի և երկրի միջև էլեկտրական միացման եղանակը կոչվում էնեյտրալ հողագործման եղանակ: Այս հողագործման եղանակը ուղղակիորեն ազդում է.Էլեկտրացանցի անվտանգության,01/29/2026
Ինչպես հասկանալ ձգողական դիմացույցի նեյտրալ կապըI. Ի՞նչ է նեյտրալ կետը:Շառավիղներում և գեներատորներում նեյտրալ կետը շառավիղների մեջ գտնվող հատուկ կետն է, որտեղ այդ կետի և յուրաքանչյուր արտաքին վերջակետի միջև բացարձակ լարումը հավասար է: Ստորև բերված դիագրամումOկետը ներկայացնում է նեյտրալ կետը:II. Ինչու՞ է նեյտրալ կետը պետք է հողագործվի:Եռաֆազ փոփոխական հոսանքի էլեկտրական համակարգում նեյտրալ կետի և երկրի միջև էլեկտրական միացման եղանակը կոչվում էնեյտրալ հողագործման եղանակ: Այս հողագործման եղանակը ուղղակիորեն ազդում է.Էլեկտրացանցի անվտանգության,01/29/2026
Հարակից լուծումներ
-
 Բաշխման ավտոմատացման համակարգերի լուծումներըՈ՞ր դեմքերն են գոյացնում վերևի գծի էքսպլուատացիայի և հաստատումը:Դեմք մեկ:Բաշխման ქալվածքի վերևի գծերը լայն տարածքով են, բարդ ռելիեֆ ունեն, շատ ճառագայթային ճյուղեր և բաշխված էլեկտրաէներգական համակարգեր, որոնք առաջ են բերում գծային անհաստատունություններ և դժվար են սխալները հայտնաբերել:Դեմք երկու:Ձեռնային սխալների հայտնաբերումը կարուտ է և կարուտ է: Միաժամանակ գծի հոսանքը, լարումը և սկզբունքը չի կարող հաստատում է իրական ժամանակում հասնել, քանի որ չկա ինտելեկտուալ տեխնոլոգիական միջոցներ:Դեմք երեք:Գծ04/22/2025
Բաշխման ավտոմատացման համակարգերի լուծումներըՈ՞ր դեմքերն են գոյացնում վերևի գծի էքսպլուատացիայի և հաստատումը:Դեմք մեկ:Բաշխման ქալվածքի վերևի գծերը լայն տարածքով են, բարդ ռելիեֆ ունեն, շատ ճառագայթային ճյուղեր և բաշխված էլեկտրաէներգական համակարգեր, որոնք առաջ են բերում գծային անհաստատունություններ և դժվար են սխալները հայտնաբերել:Դեմք երկու:Ձեռնային սխալների հայտնաբերումը կարուտ է և կարուտ է: Միաժամանակ գծի հոսանքը, լարումը և սկզբունքը չի կարող հաստատում է իրական ժամանակում հասնել, քանի որ չկա ինտելեկտուալ տեխնոլոգիական միջոցներ:Դեմք երեք:Գծ04/22/2025 -
 Միացված հոգեբանական էլեկտրաէներգիայի սպառումի և էներգետիկ էֆեկտիվության ẢNIXIE-IEE-Business ընդհանուր լուծումԸնդհանուր նկարագրությունԱյս լուծումը նպատակ է ունենում ներկայացնել ինтелиգենտ էլեկտրաէներգիայի վերլուծական համակարգ (Power Management System, PMS), որը կենտրոնացած է էլեկտրաէներգիայի ռեսուրսների վերջ-վերջ օպտիմիզացիայի շուրջ։ Միացնելով "դիտում-վերլուծություն-որոշում-կատարում" փակ շղթայի մանրամասները, այն օգնում է ընկերություններին անցնել պարզապես էլեկտրաէներգիայի օգտագործման ինտելեկտուալ էլեկտրաէներգիայի կառավարման, վերջնապես հասնելով անվտանգ, արդյունավետ, ցածր կարբոնային և տնտեսական էներգիայի օ09/28/2025
Միացված հոգեբանական էլեկտրաէներգիայի սպառումի և էներգետիկ էֆեկտիվության ẢNIXIE-IEE-Business ընդհանուր լուծումԸնդհանուր նկարագրությունԱյս լուծումը նպատակ է ունենում ներկայացնել ինтелиգենտ էլեկտրաէներգիայի վերլուծական համակարգ (Power Management System, PMS), որը կենտրոնացած է էլեկտրաէներգիայի ռեսուրսների վերջ-վերջ օպտիմիզացիայի շուրջ։ Միացնելով "դիտում-վերլուծություն-որոշում-կատարում" փակ շղթայի մանրամասները, այն օգնում է ընկերություններին անցնել պարզապես էլեկտրաէներգիայի օգտագործման ինտելեկտուալ էլեկտրաէներգիայի կառավարման, վերջնապես հասնելով անվտանգ, արդյունավետ, ցածր կարբոնային և տնտեսական էներգիայի օ09/28/2025 -
 Նոր մոդուլային հետևելու լուծում ֆոտովոլտային և էներգիայի պահեստավորման էլեկտրաէներգիայի համակարգերի համար1. Ներածություն և հետազոտական հիմնավորում1.1 Սոլային գործարանի ներկայիս վիճակըՈրպես ամենաբազմանիշ վաղական էներգիայի աղբյուրներից մեկը, սոլային էներգիայի զարգացումը և օգտագործումը դարձել է համաշխարհային էներգետիկ փոփոխության կենտրոնական հարց: Վերջին տարիների ընթացքում, աշխարհի տարբեր երկրների քաղաքականությունների շնորհիվ, ֆոտովոլտային (PV) գործարանը փորձել է ծառայաց աճ: Ավելին, վիճակագրական տվյալները ցույց են տալիս, որ Չինաստանի PV գործարանը ներկայումս դարձել է 168-անգամ ավելի մեծ ըստ «12-րդ Հինգ09/28/2025
Նոր մոդուլային հետևելու լուծում ֆոտովոլտային և էներգիայի պահեստավորման էլեկտրաէներգիայի համակարգերի համար1. Ներածություն և հետազոտական հիմնավորում1.1 Սոլային գործարանի ներկայիս վիճակըՈրպես ամենաբազմանիշ վաղական էներգիայի աղբյուրներից մեկը, սոլային էներգիայի զարգացումը և օգտագործումը դարձել է համաշխարհային էներգետիկ փոփոխության կենտրոնական հարց: Վերջին տարիների ընթացքում, աշխարհի տարբեր երկրների քաղաքականությունների շնորհիվ, ֆոտովոլտային (PV) գործարանը փորձել է ծառայաց աճ: Ավելին, վիճակագրական տվյալները ցույց են տալիս, որ Չինաստանի PV գործարանը ներկայումս դարձել է 168-անգամ ավելի մեծ ըստ «12-րդ Հինգ09/28/2025






